团队项目计划与安排
1.选题与团队组建
完成时间:18周
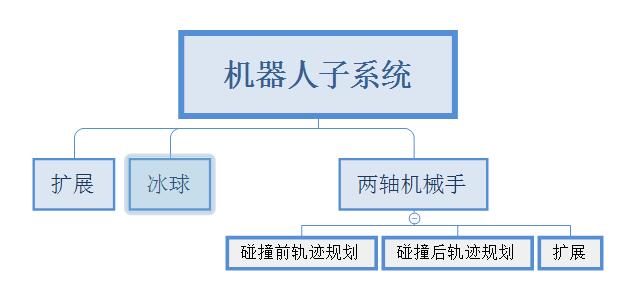
- 设计题目:机器人子系统
题目要求:
输入:目标击球位置,到达该位置的时间,以及在该位置击球器的速度矢量。
输出:在每个控制周期给出X轴和Y轴的实时位置和速度指令。
主要参数:X轴和Y轴的最大行程、最大速度加速度限制。
功能:能够根据输入的运动目标指令,实时规划从当前位置达到目标击球位置的运动轨迹,以及到达击球位置后的减速停止轨迹,在每个控制周期输出X轴和Y轴的位置和速度设定值。- 组长:欧梓峰
- 组员:黄杰,盛玉庭,张钊
2.项目分析与进展
1.需求分析:
- 基本需求:
1)在每周期内读入目标击球位置,到达位置的时间,以及在该位置击球器的速度矢量。
2)通过读入的参数计算加速度和匀速阶段的速度。
3)实现一个点从静止直线运动到另一个目标点然后减速到静止。
4)实现碰撞前轨迹规划和碰撞后的轨迹规划。
5)实时输出每个控制周期点的二维坐标和速度矢量。- 高级需求:
1)设计起始点到目标点的路径规划。
2)根据规划的路径求两轴机械手的运动学反解得到每轴的角速度和角加速度。
2.主要分工:
- 欧梓峰:项目组长,负责团队远程管理,项目设计、文档书写等工作。
- 黄杰:主要负责机械手的轨迹插补算法及编程,xenomai的使用等;
- 盛玉庭:主要负责类的设计及编程、GitHub仓库管理等;
- 张钊:主要负责概要设计,查找资料、类的设计及编程等;
3.个人任务分析
- 类设计的简要构思:
- 个人计划:
1)完成类的头文件设计
2)完成类的主要功能设计