问题描述

目标:最大化期望累加奖励(expected cumulative reward)
- Episodic Task: 在某个时间步结束,$S_0,A_0,R_1,S_1,A_1,R_2,S_2,cdots,A_{T-1},R_T,S_T(i.e., terminal ext{ }states)$
- Continuing Task: 没有明确的结束信号,$S_0,A_0,R_1,S_1,A_1,R_2,S_2,cdots$
- The discounted return(cumulative reward) at time step t: $G_{t}=R_{t+1}+gamma R_{t+2}+gamma^{2} R_{t+3}+ldots, ext{ }0leqgammaleq{1}$
马尔可夫决策过程MDP
- $mathcal{S}$: the set of all (nonterminal) states; $mathcal{S}^+$: S+{terminal states} (only for episodic task)
- $mathcal{A}$: the set of possible actions; $mathcal{A}(s)$: the set of possible actions available in state $sinmathcal{S}$
- $mathcal{R}$: the set of rewards; $gamma$: discount rate, $0leqgammaleq{1}$
- the one-step dynamics: $pleft(s^{prime}, r | s, a ight) = mathbb{P}left(S_{t+1}=s^{prime}, R_{t+1}=r | S_{t}=s, A_{t}=a ight) ext{ for each possible }s^{prime}, r, s, ext { and } a$
问题求解
- Deterministic Policy $pi$:a mapping $mathcal{S} ightarrow mathcal{A}$; Stochastic Policy $pi$: a mapping $mathcal{S} imes mathcal{A} ightarrow[0,1], ext{ i.e., }pi(a | s)=mathbb{P}left(A_{t}=a | S_{t}=s ight)$
- State-Value Function以及Action-Value Function
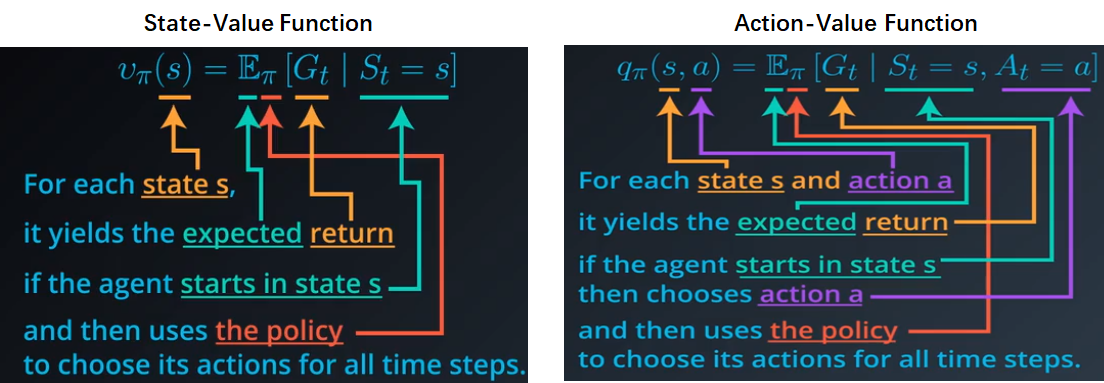
-
Bellman Equation: $v_{pi}(s)=mathbb{E}_{pi}left[R_{t+1}+gamma v_{pi}left(S_{t+1} ight) | S_{t}=s ight]$
- Policy $pi^{prime}geqpi ext{ } Longleftrightarrow ext{ } v_{pi^{prime}}(s) geq v_{pi}(s)$ for all $s in mathcal{S}$; Optimal policy(may not be unique) $pi_*geqpi ext{ for all possible }pi$
- All optimal policies have the same state-value function $v_*$ and the same action-value function $q_*$
- $pi_{*}(s)=arg max _{a in mathcal{A}(s)} q_{*}(s, a)$
求解方法:Dynamic Programming
假设条件:智能体(Agent)事先知道马尔科夫决策过程(MDP)的信息,不需要从与环境(Environment)的交互中逐渐学习
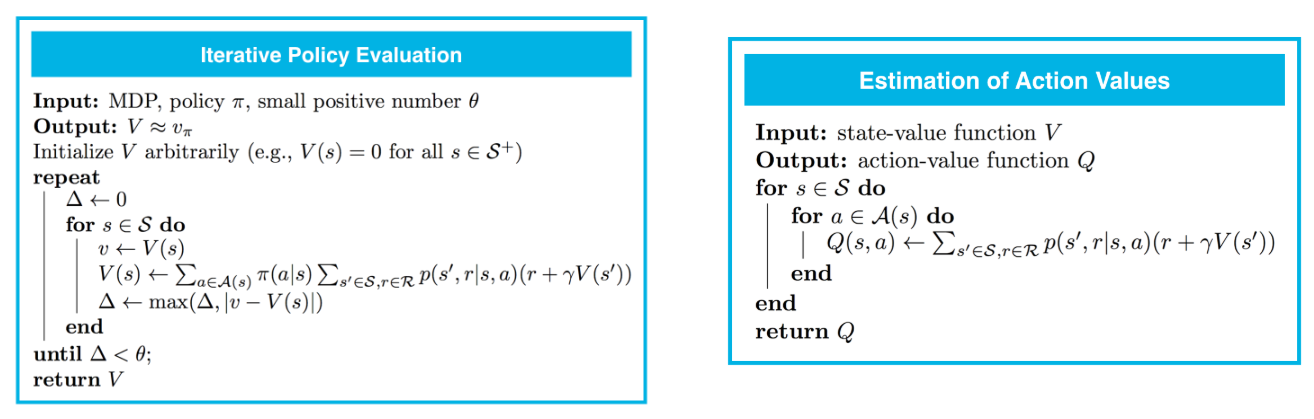
方法1:Policy Iteration
- 问题一(左图):estimate the state-value function $v_{pi}$ corresponding to a policy $pi$
- 问题二(右图):obtain the action-value function $q_{pi}$ from the state-value function $v_{pi}$
- 问题三(左图):take an estimate of the state-value function $v_{pi}$ corresponding to a policy $pi$, returns a new policy $pi^{prime}geqpi$
- 问题四(右图):solve an MDP in the dynamic programming setting

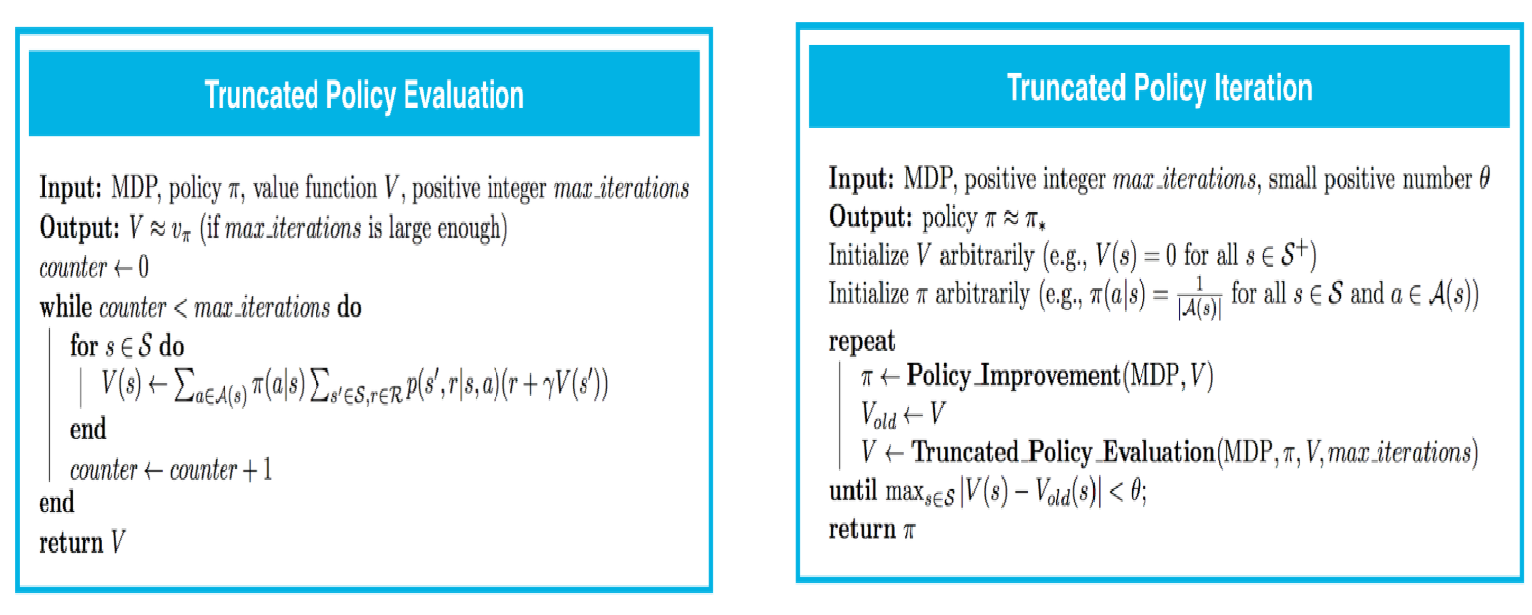
方法2:Truncated Policy Iteration
In this approach, the evaluation step is stopped after a fixed number of sweeps through the state space
方法3:Value Iteration
In this approach, each sweep over the state space simultaneously performs policy evaluation and policy improvement
