在讨论边缘算子之前,首先给出一些术语的定义:
(1)边缘:灰度或结构等信息的突变处,边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。
(2)边缘点:图像中具有坐标[x,y],且处在强度显著变化的位置上的点。
(3)边缘段:对应于边缘点坐标[x,y]及其方位 ,边缘的方位可能是梯度角。
二、Sobel算子的基本原理
Sobel算子是一阶导数的边缘检测算子,在算法实现过程中,通过3×3模板作为核与图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。
一个特殊卷积所实现的功能是由卷积核的形式决定的。这个核本质上是一个大小固定、由数值参数构成的数组,数组的参考点(anchor point)通常位于数组的中心。数组的大小成为核支撑。单就技术而言,核支撑实际上仅仅由核数组的非0部分组成。对图像的卷积,首先将核的参考点定位到图像的第一个像素点,核的其余元素覆盖图像中其相对应的局部像素点。对于每一个核点,我们可以得到这个点的核值以及图像中相应图像点的值,将这些值相乘并求和,并将这个结果放在与输入图像参考点所相对应的位置。通过在整个图像上扫描卷积核,对图像的每个点重复此操作。
索贝尔算子(Sobel operator)主要用作边缘检测,在技术上,它是一阶离散性差分算子,用来运算图像亮度函数的灰度值近似值。在图像的任何一点使用此算子,将会产生对应的灰度矢量或是其法矢量。
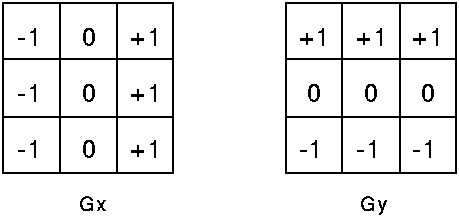
Sobel卷积因子为:

该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
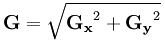
通常,为了提高效率 使用不开平方的近似值:
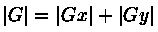
如果梯度G大于某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向:
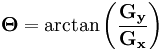
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
Sobel算子算法的优点是计算简单,速度快。但是由于只采用了2个方向的模板,只能检测水平和垂直方向的边缘,因此这种算法对于纹理较为复杂的图像,其边缘检测效果就不是很理想。该算法认为:凡灰度新值大于或等于阈值的像素点时都是边缘点。这种判断欠合理,会造成边缘点的误判,因为许多噪声点的灰度值也很大。
1 #include <opencv2/opencv.hpp> 2 3 int main(int argc, char **argv) 4 { 5 //定义显示窗口的名字 6 const char *ptrSrcImageWindowTitle = "SrcImage"; 7 const char *ptrGrayImageWindowTitle = "GrayImage"; 8 const char *ptrDesImageWindowTitle = "DesImage"; 9 //载入图片并且分配图片所需内存 10 IplImage *pSrcImage = cvLoadImage("8.png", CV_LOAD_IMAGE_ANYCOLOR); 11 IplImage *pGrayImage = cvCreateImage(cvGetSize(pSrcImage), IPL_DEPTH_8U, 1); 12 IplImage *pSobelImage = cvCreateImage(cvGetSize(pSrcImage), IPL_DEPTH_8U, 1); 13 //转成相应的灰度图像 14 cvCvtColor(pSrcImage, pGrayImage, CV_BGR2GRAY); 15 //进行Sobel边缘检测,注意xorder和yorder的不同,边缘检测的方向不同 16 //注意各种角度的边缘检测,不过核要自己设计 17 cvSobel(pGrayImage, pSobelImage, 1, 0, 3); 18 19 cvNamedWindow(ptrSrcImageWindowTitle, CV_WINDOW_AUTOSIZE); 20 cvNamedWindow(ptrGrayImageWindowTitle, CV_WINDOW_AUTOSIZE); 21 cvNamedWindow(ptrDesImageWindowTitle, CV_WINDOW_AUTOSIZE); 22 23 cvShowImage(ptrSrcImageWindowTitle, pSrcImage); 24 cvShowImage(ptrGrayImageWindowTitle, pGrayImage); 25 cvShowImage(ptrDesImageWindowTitle, pSobelImage); 26 27 cvWaitKey(0); 28 cvReleaseImage(&pSrcImage); 29 cvReleaseImage(&pGrayImage); 30 cvReleaseImage(&pSobelImage); 31 32 cvDestroyWindow(ptrSrcImageWindowTitle); 33 cvDestroyWindow(ptrGrayImageWindowTitle); 34 cvDestroyWindow(ptrDesImageWindowTitle); 35 36 }
附带知识:
普利维特算子(Prewitt operate):
除sobel边缘检测外 还有Prewitt算子, 它的卷积因子如下:
其他计算 和sobel差不多;
Prewitt算子利用像素点上下、左右邻点灰度差,在边缘处达到极值检测边缘。对噪声具有平滑作用,定位精度不够高。
罗伯茨交叉边缘检测(Roberts Cross operator)
卷积因子如下:
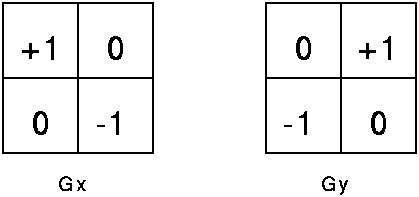
灰度公式为:
近似公式为:
具体计算如下:
G(x,y)=abs(f(x,y)-f(x+1,y+1))+abs(f(x,y+1)-f(x+1,y))
灰度方向 计算公式为:

Roberts算子采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测水平和垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感。