通过半物理仿真,可以在不试飞的情况下对飞控的软硬件进行部分验证,下面结合文档对半物理仿真环境的搭建和运行进行学习。先跑起来再说。
Pixhawk支持多轴和固定翼的仿真,多轴用jMavSim,固定翼用XPlane或者FlightGear。
本文主要学习用jMavSim进行多轴仿真的。
官网教程给出的是先打开jMavSim进行连接,再打开QGC,但是前提是你已经在QGC里设置好了Pixhawk,所以本文从设置开始。
- 打开QGroundControl
按官网教程需要设置,笔者发现用QGC做四轴的HIL仿真时无需设置HIL的源,只需在选择Airframe时选择HIL并校准遥控器和操纵模式即可。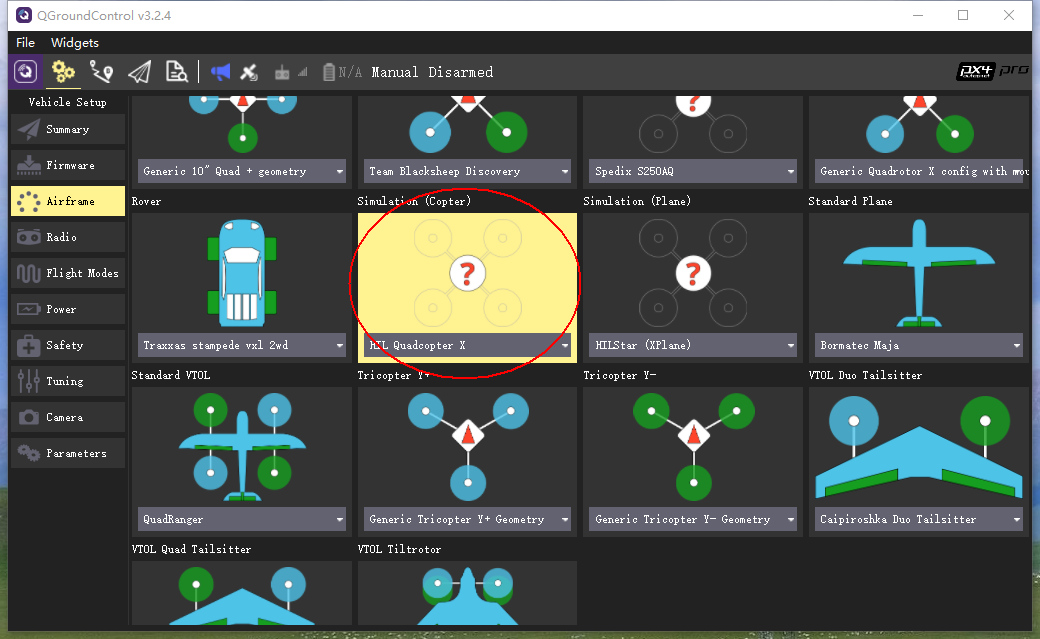
按照机架选择HIL Quadcopter X,然后校准Radio并设置FlightMode,然后退出QGC并重启飞控。
- 启动jMavSim
确保QGroundControl没有运行,连接飞控,启动jMavSim
./Tools/jmavsim_run.sh -q -d /dev/ttyACM0 -b 921600 -r 250
启动后界面如下:

- 运行HIL仿真
出现Init MAVLink字样证明已经连接上飞控,然后打开QGC,用遥控器和QGC来操作无人机。则在jMAVSim中可以显示无人机的运行视景。