本文来源于:http://wiki.ros.org/ROS/Tutorials/UnderstandingTopics
- ROS主题
假设turtlesim节点已经运行,打开一个新终端,使用如下命令运行键盘控制节点
$ rosrun turtlesim turtle_teleop_key
则终端会弹出来如下窗口:
表示从键盘读取输入来控制小海龟移动。
将焦点选中到该窗口,即可使用键盘上的方向键来移动小 海龟。
下来我们来分析一下在这背后,发生了什么。
- 理解ROS主题(Topic)
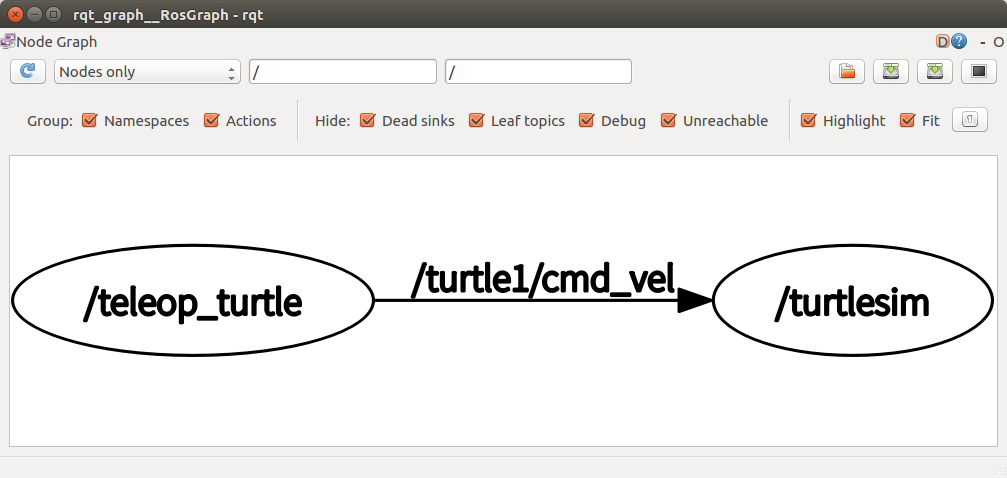
上面有两个节点:turtlesim和turtle_teleop_key,他们通过ROS主题来进行通信。其中,turtle_teleop_key将键盘点击信息发布到消息中,turtlesim节点通过订阅该主题来接收键盘点击信息。- 使用rqt_graph
ROS提供了可视化工具,rqt_graph来查看ROS系统中运行了什么东西。该工具属于rqt_graph包,我们可以通过如下命令安装该包。
$ sudo apt-get install ros-<distro>-rqt $ sudo apt-get install ros-<distro>-rqt-common-plugins
其中,distro为ROS发行版本,本教程中使用kinetic版本。
然后在新终端中运行:$ rosrun rqt_graph rqt_graph
则会出现如下界面:
如果将鼠标放在/turtle1/cmd_vel上,则界面中两个椭圆会颜色会发生如下变化:
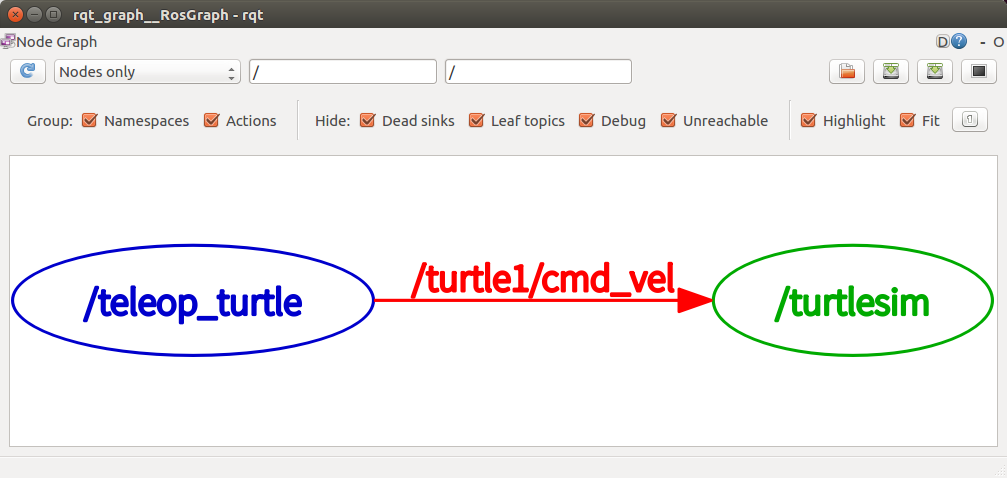
其中,变为红色的主题(Topics),蓝色和绿色的为节点(Nodes),其中蓝色为该主题的发布节点,绿色为该主题的订阅节点。
- rostopic
ROS提供了rostopic命令来查看主题相关的信息。
rostopic有一些子命令,可以使用rostopic -h查看,如下所示: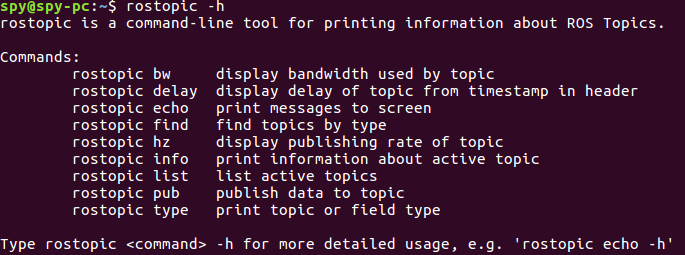
-
rostopic echo
其中,rostopic echo命令可以打印主题消息。语法如下:rostopic echo [topic]
例如我们之前用rqt_graph查看到一个主题:/turtle1/cmd_vel,我们可以用如下命令来查看该中主题中的消息:
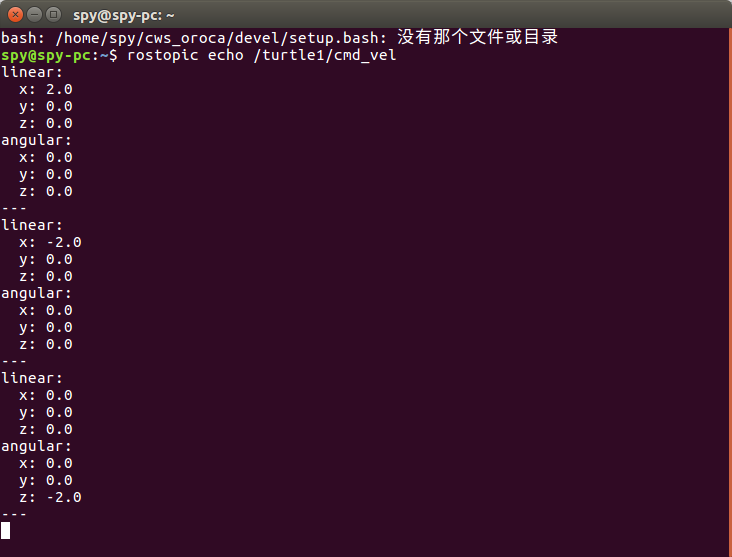
如上图所示,运行了
rostopic echo /turtle1/cmd_vel
之后,将焦点中选中到键盘节点的窗口,点击方向键,则可以打印出该主题的消息内容。
现在如果再运行rqt_graph,则显示如下:
可以看出来多了一个节点来订阅/turtle1/cmd_vel主题,该节点即为rostopic echo节点。
- rostopic list
rostopic list命令可以列出当前订阅或发布的主题,用法如下: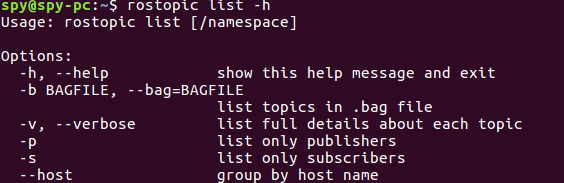
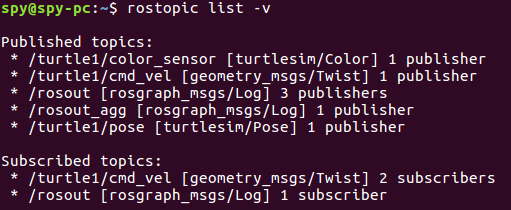
若使用-v选项,则会列出来当前订阅和发布主题的完整信息。
- rostopic type
节点之前通过订阅和发布主题来进行通信,而发送和接收的数据需要是同一类型的消息,通信的内容形式即为消息(Message)。
这些消息的类型可以通过rostopic type命令查看,该命令用法为:
rostopic type [topic]
例如,我们可以查看/turtle1/cmd_vel中的消息类型:

该主题的消息类型为:geometry_msgs/Twist。
可以使用如下命令查看该消息类型的数据成员:spy@spy-pc:~$ rosmsg show geometry_msgs/Twist geometry_msgs/Vector3 linear float64 x float64 y float64 z geometry_msgs/Vector3 angular float64 x float64 y float64 z
可以看出来该消息类型包含两个向量Vector3类型的结构体,分别表示速度和角速度。
- rostopic pub
rostopic pub命令可以直接发布ros主题的消息。该命令用法如下:
rostopic pub [topic] [msg_type] [args]
例如:
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
该命令表示发布类型为geometry_msgs/Twist的消息到/turtle1/cmd_vel主题,该消息参数为:'[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'表示速度为向前2.0,角速度为1.8,-1表示只发布一次消息。
两个短杠--表示,后面的均是参数,不是选项,以防止解析器解析错误,例如含有符号的参数,如不加区分,解析器可能会按照选项来解析。
这组参数使用的是YAML语法,关于该语法的更多信息请参考YAML command line documentation.
在该命令下,小乌龟移动界面如下图所示: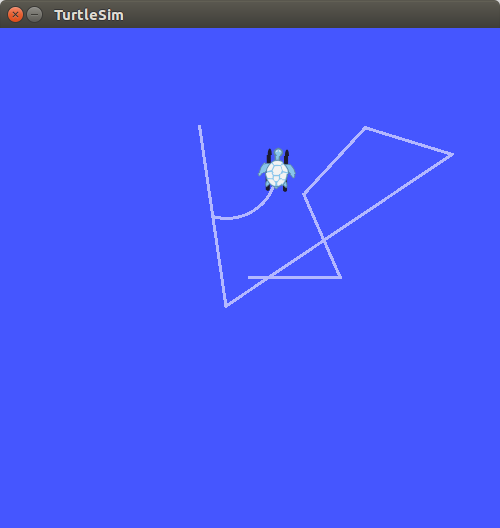
可以看出,小乌龟大约 移动了1/4段圆弧。
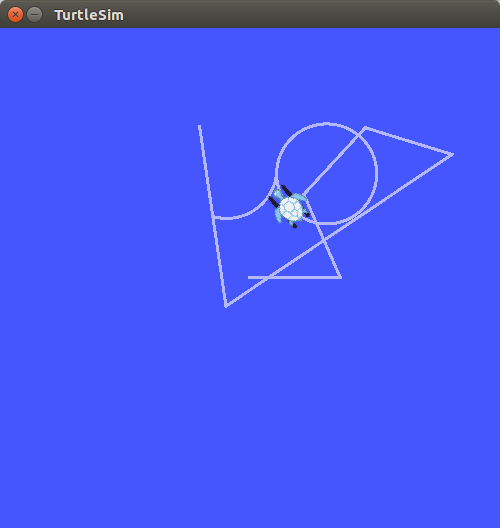
为了使小乌龟持续移动,我们需要持续发布该消息,需要加入持续发布消息的频率参数,该参数可以使用-r选项指定,例如使用如下语句:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
就可以让乌龟持续转圈:
再使用rqt_graph查看主题:
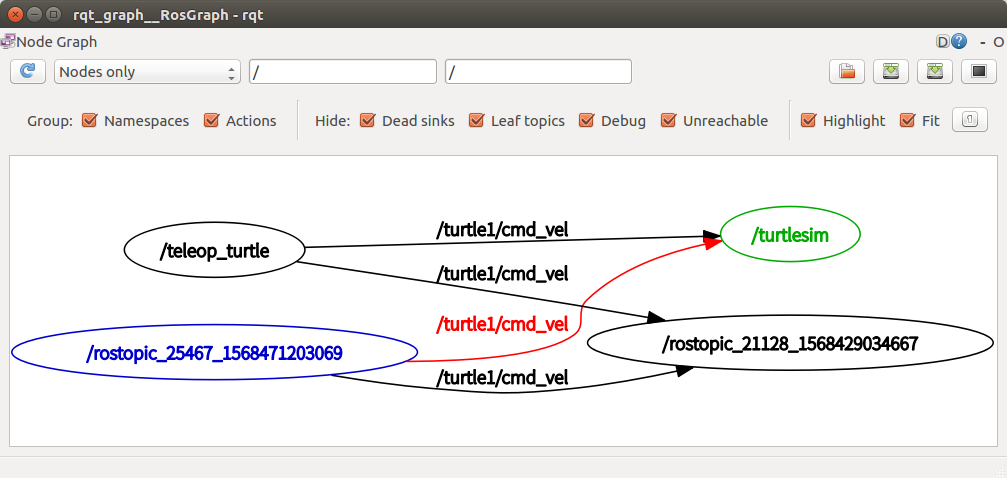
可以看出来多了一个节点来发布/turtle1/cmd_vel主题到/turtlesim节点的。
- 消息数据的可视化
- rostopic hz
rostopic hz命令可以查看一个主题的发布频率,例如:
rostopic hz /turtle1/pose subscribed to [/turtle1/pose] average rate: 62.485 min: 0.004s max: 0.028s std dev: 0.00250s window: 63 average rate: 62.495 min: 0.004s max: 0.028s std dev: 0.00180s window: 125 average rate: 62.489 min: 0.004s max: 0.028s std dev: 0.00149s window: 188 average rate: 62.495 min: 0.002s max: 0.029s std dev: 0.00181s window: 250 average rate: 62.500 min: 0.002s max: 0.029s std dev: 0.00175s window: 313 average rate: 62.501 min: 0.002s max: 0.029s std dev: 0.00190s window: 375 average rate: 62.501 min: 0.002s max: 0.029s std dev: 0.00176s window: 438 average rate: 62.501 min: 0.002s max: 0.029s std dev: 0.00166s window: 501 average rate: 62.501 min: 0.002s max: 0.029s std dev: 0.00165s window: 563 average rate: 62.502 min: 0.002s max: 0.029s std dev: 0.00175s window: 626 average rate: 62.498 min: 0.002s max: 0.029s std dev: 0.00178s window: 688 average rate: 62.501 min: 0.002s max: 0.029s std dev: 0.00171s window: 751 average rate: 62.498 min: 0.002s max: 0.029s std dev: 0.00165s window: 813 average rate: 62.501 min: 0.002s max: 0.029s std dev: 0.00159s window: 876 average rate: 62.500 min: 0.002s max: 0.029s std dev: 0.00158s window: 938 average rate: 62.499 min: 0.002s max: 0.029s std dev: 0.00153s window: 1001 average rate: 62.499 min: 0.002s max: 0.029s std dev: 0.00149s window: 1064 average rate: 62.500 min: 0.002s max: 0.029s std dev: 0.00147s window: 1126 average rate: 62.499 min: 0.001s max: 0.032s std dev: 0.00161s window: 1189 average rate: 62.499 min: 0.001s max: 0.032s std dev: 0.00162s window: 1251 average rate: 62.499 min: 0.001s max: 0.032s std dev: 0.00159s window: 1314 average rate: 62.501 min: 0.001s max: 0.032s std dev: 0.00155s window: 1376 average rate: 62.500 min: 0.001s max: 0.032s std dev: 0.00152s window: 1439 average rate: 62.500 min: 0.001s max: 0.032s std dev: 0.00149s window: 1501 average rate: 62.500 min: 0.001s max: 0.032s std dev: 0.00147s window: 1564 average rate: 62.500 min: 0.001s max: 0.032s std dev: 0.00145s window: 1627 average rate: 62.499 min: 0.001s max: 0.032s std dev: 0.00142s window: 1689 average rate: 62.500 min: 0.001s max: 0.032s std dev: 0.00140s window: 1752 average rate: 62.444 min: 0.001s max: 0.041s std dev: 0.00155s window: 1813
可以看出,turtlesim节点发布的/turtle1/pose主题频率约为62Hz,并且给出了统计特性,最大值,最小值和方差。
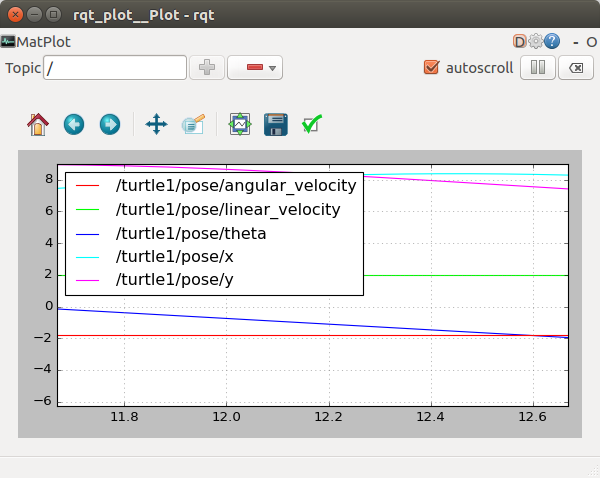
- rqt_plot
该命令会把消息数据绘图:
rosrun rqt_plot rqt_plot
会弹出rqt_plot的界面,然后在界面中Topic后面的文本框中输入主题名,例如输入:/turtle1/pose然后就会显示/turtle1/pose主题中的消息数据曲线。
- rostopic hz
- 使用rqt_graph