一 进程空间分布概述
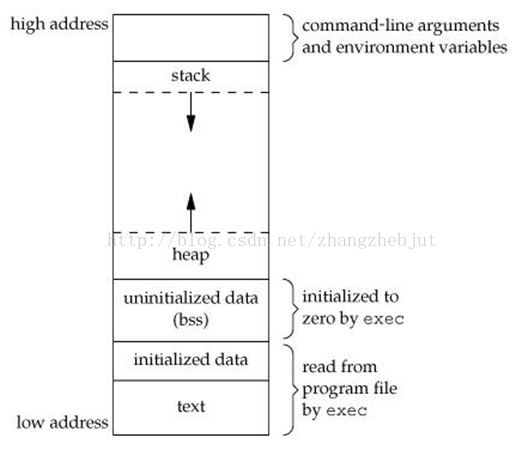
程序段(Text):程序代码在内存中的映射,存放函数体的二进制代码。
初始化过的数据(Data):在程序运行初已经对变量进行初始化的数据。
未初始化过的数据(BSS):在程序运行初未对变量进行初始化的数据。
栈 (Stack):存储局部、临时变量,函数调用时,存储函数的返回指针,用于控制函数的调用和返回。在程序块开始时自动分配内存,结束时自动释放内存,其操作方式类似于数据结构中的栈。
堆 (Heap):存储动态内存分配,需要程序员手工分配,手工释放.注意它与数据结构中的堆是两回事,分配方式类似于链表。
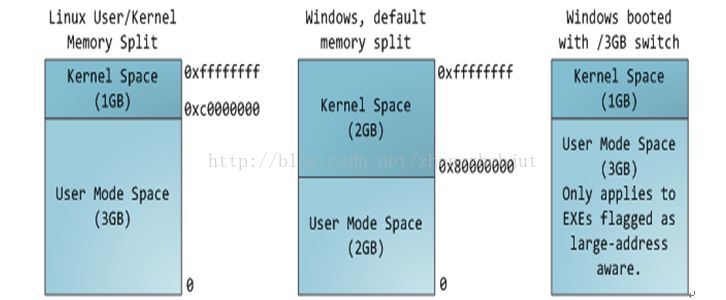
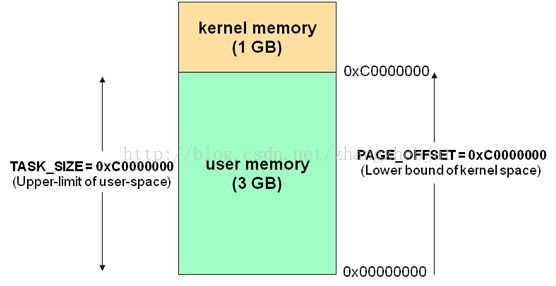
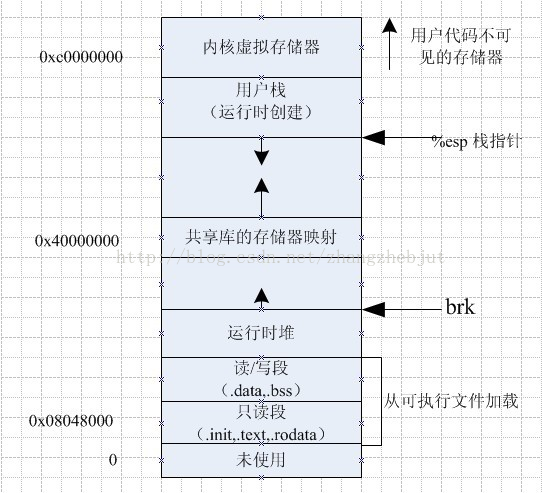
Linux使用两级保护机制:0级供内核使用,3级供用户程序使用,每个进程有各自的私有用户空间(0~3G),这个空间对系统中的其他进程是不可见的,最高的1GB字节虚拟内核空间则为所有进程以及内核所共享。
内核空间中存放的是内核代码和数据,而进程的用户空间中存放的是用户程序的代码和数据。不管是内核空间还是用户空间,它们都处于虚拟空间中。 虽然内核空间占据了每个虚拟空间中的最高1GB字节,但映射到物理内存却总是从最低地址(0x00000000),另外,使用虚拟地址可以很好的保护内核空间被用户空间破坏,虚拟地址到物理地址转换过程有操作系统和CPU共同完成(操作系统为CPU设置好页表,CPU通过MMU单元进行地址转换)。
相对地,应用程序则是在“用户空间”中运行。运行在用户空间的应用程序只能看到允许它们使用的部分系统资源,并且不能使用某些特定的系统功能,也不能直接访问内核空间和硬件设备,以及其他一些具体的使用限制。
将用户空间和内核空间置于这种非对称访问机制下有很好的安全性,能有效抵御恶意用户的窥探,也能防止质量低劣的用户程序的侵害,从而使系统运行得更稳定可靠。
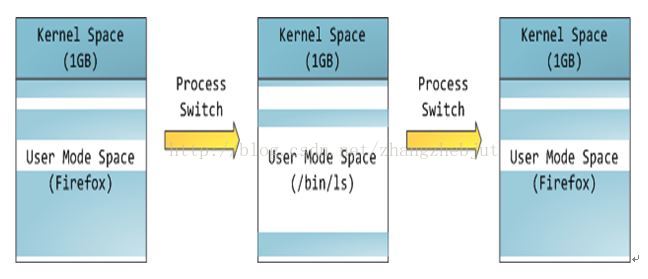
上图中蓝色区域表示映射到物理内存的虚拟地址,而白色区域表示未映射的部分。可以看出,Firefox使用了相当多的虚拟地址空间,因为它占用内存较多。
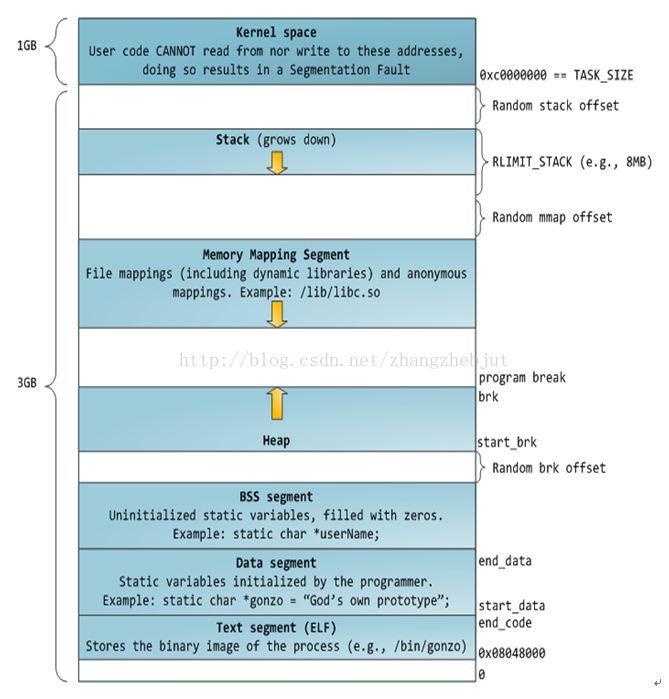
进程地址空间中最顶部的段是栈,大多数编程语言将之用于存储函数参数和局部变量。调用一个方法或函数会将一个新的栈帧(stack frame)压入到栈中,这个栈帧会在函数返回时被清理掉。由于栈中数据严格的遵守FIFO的顺序,这个简单的设计意味着不必使用复杂的数据结构来追踪栈中的内容,只需要一个简单的指针指向栈的顶端即可,因此压栈(pushing)和退栈(popping)过程非常迅速、准确。进程中的每一个线程都有属于自己的栈。
通过不断向栈中压入数据,超出其容量就会耗尽栈所对应的内存区域,这将触发一个页故障(page fault),而被Linux的expand_stack()处理,它会调用acct_stack_growth()来检查是否还有合适的地方用于栈的增长。如果栈的大小低于RLIMIT_STACK(通常为8MB),那么一般情况下栈会被加长,程序继续执行,感觉不到发生了什么事情。这是一种将栈扩展到所需大小的常规机制。然而,如果达到了最大栈空间的大小,就会栈溢出(stack overflow),程序收到一个段错误(segmentation fault)。

你可以通过阅读文件/proc/pid_of_process/maps来检验一个Linux进程中的内存区域。记住:一个段可能包含许多区域。比如,每个内存映射文件在mmap段中都有属于自己的区域,动态库拥有类似BSS和数据段的额外区域。有时人们提到“数据段”,指的是全部的数据段+BSS+堆。
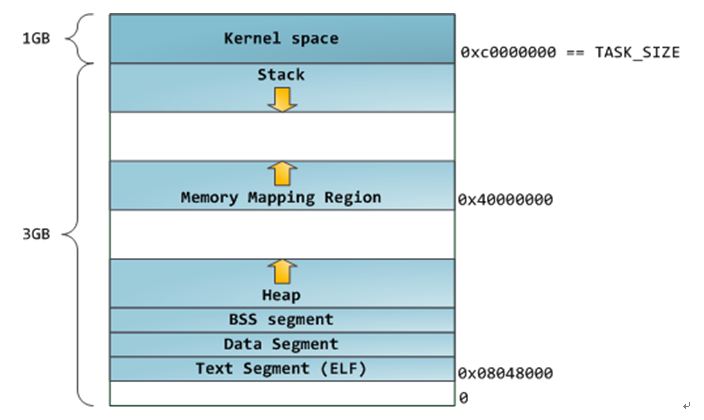
你还可以通过nm和objdump命令来察看二进制镜像,打印其中的符号,它们的地址,段等信息。最后需要指出的是,前文描述的虚拟地址布局在linux中是一种“灵活布局”,而且作为默认方式已经有些年头了,它假设我们有值RLIMT_STACK。但是,当没有该值得限制时,Linux退回到“经典布局”,如下图所示:
进程内存分布
之前一直在分析栈,栈这个东西的作用也介绍得差不多了,但是栈在哪儿还没有搞清楚,以及堆、代码、全局变量它们在哪儿,这都牵涉到进程的内存分布。
linux 0.01 的进程内存分布
内存分布随着操作系统的更新换代,越来越科学合理,也越来越复杂,所以我们还是先了解一下早期操作系统的典型 linux 0.01 的进程的内存分布:
linux 0.01 的一个进程固定拥有64MB的线性内存空间(ACM竞赛中单个程序的最大内存占用限制为64MB,这肯定有猫腻O(∩_∩)O~),各个进程挨个放置在一张页目录表中,一个页目录表可管理4G的线性空间,因此 linux0.01 最多有 64个进程。每个进程的内存分布如下:
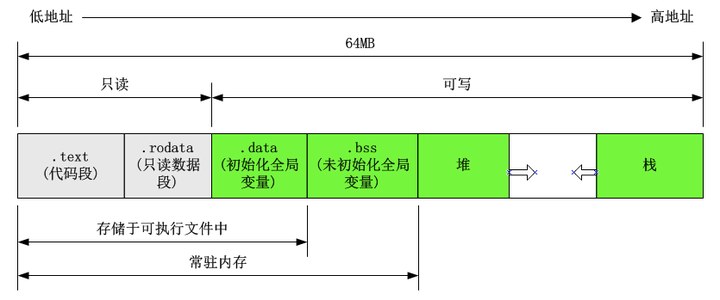
- .text 里存的是机器码序列
- .rodata 里存的是源字符串等只读内容
- .data 里存的是初始化的全局变量
- .bss 上一篇介绍过了,存的是未初始化的全局变量
- 堆、栈就不用介绍了吧!
- 【注意】static 变量未初始化默认赋值为0或者空格。未初始化变量和初始化为0,都分配在.bss段。
.text .rodata .data .bss 是常驻内存的,也就是说进程从开始运行到进程僵死它们一直蹲在那里,所以访问它们用的是常量地址;而栈是不断的加帧(函数调用)、减帧(函数返回)的,帧内的局部变量只能用相对于当前 esp(指向栈顶)或 ebp(指向当前帧)的相对地址来访问。
栈被放置在高地址也是有原因的: 调用函数(加帧)是减 esp 的,函数返回(减帧)是加 esp 的,调用在前,所以栈是向低地址扩展的,放在高地址再合适不过了。
现代操作系统的进程内存分布
认识了 linux 0.01 的内存分布后,再看看现代操作系统的内存分布发生了什么变化:
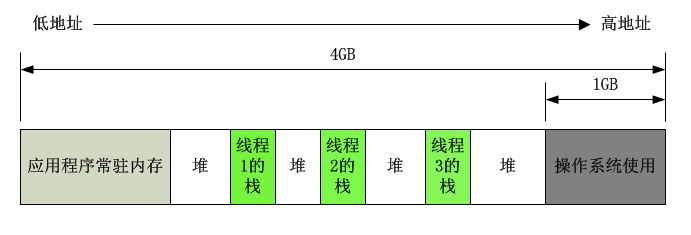
首先,linux 0.01 进程的64MB内存限制太过时了,现在的程序都有潜力使用到 2GB、3GB 的内存空间(每个进程一张页目录表),当然,机器有硬伤的话也没办法,我的电脑就只有 2GB 的内存,想用 3GB 的内存是没指望了。但也不是有4GB内存就可以用4GB(32位),因为操作系统还要占个坑呢!现代 linux 中 0xC0000000 以上的 1GB 空间是操作系统专用的,而 linux 0.01 中第1个 64MB 是操作系统的坑,所以别的进程完全占有它们的 64MB,也不用跟操作系统客气。
其次,linux 0.01只有进程没有线程,但是现代 linux 有多线程了(linux 的线程其实是个轻量级的进程),一个进程的多个线程之间共享全局变量、堆、打开的文件…… 但栈是不能共享的:栈中各层函数帧代表着一条执行线索,一个线程是一条执行线索,所以每个线程独占一个栈,而这些栈又都必须在所属进程的内存空间中。
根据以上两点,进程的内存分布就变成了下面这个样子:
再者,如果把动态装载的动态链接库也考虑进去的话,上面的分布图将会更加"破碎"。
如果我们的程序没有采用多线程的话,一般可以简单地认为它的内存分布模型是 linux 0.01 的那种。