ZooKeeper为高可用的一致性协调框架,自然的ZooKeeper也有着一致性算法的实现,ZooKeeper使用的是ZAB协议作为数据一致性的算法,ZAB(ZooKeeper Atomic Broadcast )全称为:原子消息广播协议;ZAB可以说是在Paxos算法基础上进行了扩展改造而来的,ZAB协议设计了支持崩溃恢复,ZooKeeper使用单一主进程Leader用于处理客户端所有事务请求,采用ZAB协议将服务器数状态以事务形式广播到所有Follower上;由于事务间可能存在着依赖关系,ZAB协议保证Leader广播的变更序列被顺序的处理,:一个状态被处理那么它所依赖的状态也已经提前被处理;ZAB协议支持的崩溃恢复可以保证在Leader进程崩溃的时候可以重新选出Leader并且保证数据的完整性;
在ZooKeeper中所有的事务请求都由一个主服务器也就是Leader来处理,其他服务器为Follower,Leader将客户端的事务请求转换为事务Proposal,并且将Proposal分发给集群中其他所有的Follower,然后Leader等待Follwer反馈,当有过半数(>=N/2+1)的Follower反馈信息后,Leader将再次向集群内Follower广播Commit信息,Commit为将之前的Proposal提交;
协议状态
ZAB协议中存在着三种状态,每个节点都属于以下三种中的一种:
1. Looking:系统刚启动时或者Leader崩溃后正处于选举状态
2. Following:Follower节点所处的状态,Follower与Leader处于数据同步阶段;
3. Leading:Leader所处状态,当前集群中有一个Leader为主进程;
ZooKeeper启动时所有节点初始状态为Looking,这时集群会尝试选举出一个Leader节点,选举出的Leader节点切换为Leading状态;当节点发现集群中已经选举出Leader则该节点会切换到Following状态,然后和Leader节点保持同步;当Follower节点与Leader失去联系时Follower节点则会切换到Looking状态,开始新一轮选举;在ZooKeeper的整个生命周期中每个节点都会在Looking、Following、Leading状态间不断转换;
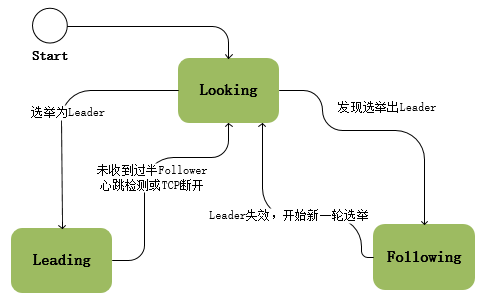
状态切换图
选举出Leader节点后ZAB进入原子广播阶段,这时Leader为和自己同步的每个节点Follower创建一个操作序列,一个时期一个Follower只能和一个Leader保持同步,Leader节点与Follower节点使用心跳检测来感知对方的存在;当Leader节点在超时时间内收到来自Follower的心跳检测那Follower节点会一直与该节点保持连接;若超时时间内Leader没有接收到来自过半Follower节点的心跳检测或TCP连接断开,那Leader会结束当前周期的领导,切换到Looking状态,所有Follower节点也会放弃该Leader节点切换到Looking状态,然后开始新一轮选举;
阶段
ZAB协议定义了选举(election)、发现(discovery)、同步(sync)、广播(Broadcast)四个阶段;ZAB选举(election)时当Follower存在ZXID(事务ID)时判断所有Follower节点的事务日志,只有lastZXID的节点才有资格成为Leader,这种情况下选举出来的Leader总有最新的事务日志,基于这个原因所以ZooKeeper实现的时候把发现(discovery)与同步(sync)合并为恢复(recovery)阶段;
1. Election:在Looking状态中选举出Leader节点,Leader的lastZXID总是最新的;
2. Discovery:Follower节点向准Leader推送FOllOWERINFO,该信息中包含了上一周期的epoch,接受准Leader的NEWLEADER指令,检查newEpoch有效性,准Leader要确保Follower的epoch与ZXID小于或等于自身的;
3. sync:将Follower与Leader的数据进行同步,由Leader发起同步指令,最总保持集群数据的一致性;
4. Broadcast:Leader广播Proposal与Commit,Follower接受Proposal与Commit;
5. Recovery:在Election阶段选举出Leader后本阶段主要工作就是进行数据的同步,使Leader具有highestZXID,集群保持数据的一致性;
选举(Election)
election阶段必须确保选出的Leader具有highestZXID,否则在Recovery阶段没法保证数据的一致性,Recovery阶段Leader要求Follower向自己同步数据没有Follower要求Leader保持数据同步,所有选举出来的Leader要具有最新的ZXID;
在选举的过程中会对每个Follower节点的ZXID进行对比只有highestZXID的Follower才可能当选Leader;
选举流程:
1. 每个Follower都向其他节点发送选自身为Leader的Vote投票请求,等待回复;
2. Follower接受到的Vote如果比自身的大(ZXID更新)时则投票,并更新自身的Vote,否则拒绝投票;
3. 每个Follower中维护着一个投票记录表,当某个节点收到过半的投票时,结束投票并把该Follower选为Leader,投票结束;
ZAB协议中使用ZXID作为事务编号,ZXID为64位数字,低32位为一个递增的计数器,每一个客户端的一个事务请求时Leader产生新的事务后该计数器都会加1,高32位为Leader周期epoch编号,当新选举出一个Leader节点时Leader会取出本地日志中最大事务Proposal的ZXID解析出对应的epoch把该值加1作为新的epoch,将低32位从0开始生成新的ZXID;ZAB使用epoch来区分不同的Leader周期;
恢复(Recovery)
在election阶段选举出来的Leader已经具有最新的ZXID,所有本阶段的主要工作是根据Leader的事务日志对Follower节点数据进行更新;
Leader:Leader生成新的ZXID与epoch,接收Follower发送过来的FOllOWERINFO(含有当前节点的LastZXID)然后往Follower发送NEWLEADER;Leader根据Follower发送过来的LastZXID根据数据更新策略向Follower发送更新指令;
同步策略:
1. SNAP:如果Follower数据太老,Leader将发送快照SNAP指令给Follower同步数据;
2. DIFF:Leader发送从Follolwer.lastZXID到Leader.lastZXID议案的DIFF指令给Follower同步数据;
3. TRUNC:当Follower.lastZXID比Leader.lastZXID大时,Leader发送从Leader.lastZXID到Follower.lastZXID的TRUNC指令让Follower丢弃该段数据;
Follower:往Leader发送FOLLOERINFO指令,Leader拒绝就转到Election阶段;接收Leader的NEWLEADER指令,如果该指令中epoch比当前Follower的epoch小那么Follower转到Election阶段;Follower还有主要工作是接收SNAP/DIFF/TRUNC指令同步数据与ZXID,同步成功后回复ACKNETLEADER,然后进入下一阶段;Follower将所有事务都同步完成后Leader会把该节点添加到可用Follower列表中;
SNAP与DIFF用于保证集群中Follower节点已经Committed的数据的一致性,TRUNC用于抛弃已经被处理但是没有Committed的数据;
广播(Broadcast)
客户端提交事务请求时Leader节点为每一个请求生成一个事务Proposal,将其发送给集群中所有的Follower节点,收到过半Follower的反馈后开始对事务进行提交,ZAB协议使用了原子广播协议;在ZAB协议中只需要得到过半的Follower节点反馈Ack就可以对事务进行提交,这也导致了Leader几点崩溃后可能会出现数据不一致的情况,ZAB使用了崩溃恢复来处理数字不一致问题;消息广播使用了TCP协议进行通讯所有保证了接受和发送事务的顺序性。广播消息时Leader节点为每个事务Proposal分配一个全局递增的ZXID(事务ID),每个事务Proposal都按照ZXID顺序来处理;
Leader节点为每一个Follower节点分配一个队列按事务ZXID顺序放入到队列中,且根据队列的规则FIFO来进行事务的发送。Follower节点收到事务Proposal后会将该事务以事务日志方式写入到本地磁盘中,成功后反馈Ack消息给Leader节点,Leader在接收到过半Follower节点的Ack反馈后就会进行事务的提交,以此同时向所有的Follower节点广播Commit消息,Follower节点收到Commit后开始对事务进行提交;
参考资料:
http://web.stanford.edu/class/cs347/reading/zab.pdf
http://www.tcs.hut.fi/Studies/T-79.5001/reports/2012-deSouzaMedeiros.pdf