目录
概览
-
描述:模型基于LSTM神经网络提出新型的Spatio-Temporal Graph(时空图),旨在实现在拥挤的环境下,通过将行人-行人,行人-静态物品两类交互纳入考虑,对行人的轨迹做出预测。
-
训练与测试数据库
- 数据库:ETH Walking Pedestrian & UCY Students and Zara
- 数据:请参见https://www.cnblogs.com/sinoyou/p/11227348.html
QUESTION
数据库ETH和UCY中均只提供行人的轨迹坐标信息,未提供静态物体的坐标和分类方式,有关Obstacle的数据来源未知。
-
评价指标与评价结果
-
ADE(Average Displacement Error) - 计算出每位行人整个轨迹偏差的均值,再对所有行人取平均。
ADE = $$Sigma^N_{j=1}{Sigma^n_{i=1}sqrt{(hat x_i^j - x_i^j)^2 + (hat y_i^j - y_i^j)^2} over n} over N$$
-
FDE(Final Displacement Error)- 计算出每位行人轨迹重点的偏差,再对所有行人取平均。
FDE = $$Sigma^N_{j=1}{sqrt{(hat x_n^j - x_n^j)^2 + (hat y_n^j - y_n^j)^2}} over N$$
-
评价结果:
- 对比其他Graph-based baselines:S-RNN、Social Attention等,H-H和H-H-O模型的平均测试结果能够减少最大为55%的ADE和61%的FDE。
- 对比Social LSTM和SGAN等其他模型,有以下重大提升:
- 在静止物体较多的数据集(如Hotel和UCY)中,H-H-O模型在FDE错误率上最高降低93%。
- 在人群密集处如入口(ETH)中,人群避免碰撞的情况常发生,H-H-O在FDE错误率上最高降低89%。
- 相比于其他模型,此模型更适合预测Finial Step,而不是Entire Step。
-
模型
本文在此将基于基于图的神经网络资料阅读整理的已有内容着重强调新模型运用Attention机制在原有SRNN模型基础上做出的改进,其他基础型内容请参见链接。
Spatio-Temporal Graph
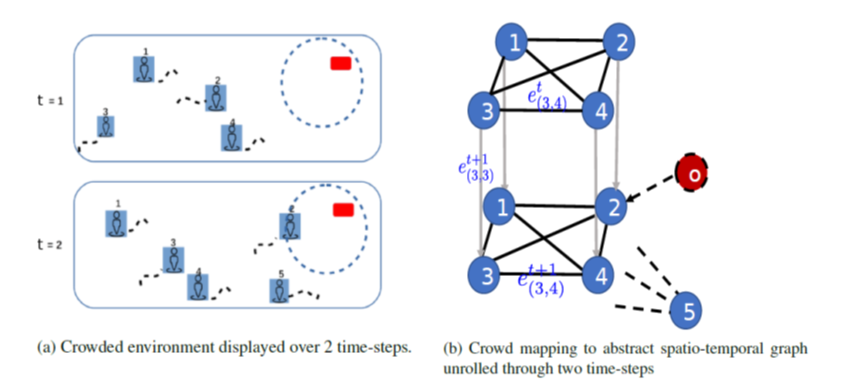
模型中的时空图有两类点和三类边
- Pedestrian Node:行人点
- Object Node:静态物品点
- Spatial-Edge(两类):同一时刻不同点之间的连边。所有行人之间都连有双向的Spatial-Edge,当行人很靠近Object时,有从Object指向行人的单向Spatial-Edge。
- Temporal-Edge:相邻时刻连接相同行人点的单向边。
边权(edge features)定义
- 不同点之间的边(Spatial-Edge)如(x_{v_1v_2}),表示两点之间距离。
- 相同点之间的边(Temporal-Edge)如(x_{v_1v_1}),表示该点的位置。
LSTM替换st-graph中的部件
- 将st-graph因式化分解,st-graph的点和边替换为LSTM序列后得到:temporal edgeLSTM, spatial edgeLSTM, nodeLSTM。
- 同SRNN结构,nodeLSTM的输出时每一步预测的最终输出,在每一步运行时会将相邻edgeLSTMs的输出经过注意力机制后作为输入,层级在edgeLSTMs之上。
Edge LSTM
spatial edgeLSTM
对于每条edge都有一个LSTM模型,为了适应后续nodeLSTM处理方式,对于spatial edges将统一处理同一个点为起点的所有spatial edges(以 · 表示)。
$$e^t_{v_2.} = phi(x_{v_2.}^t;W_s)$$ - embedding
$$h^t_{v_2.} = LSTM(h_{v_2.}^{t-1}, e^t_{v_2.}, W_s^{lstm})$$ - lstm cell
temporal edgeLSTM
对于每个点都仅有一个temporal edgeLSTM,因此无需批量地处理。
$$e_{v_2v_2} = phi(x^t_{v_2v_2};W_t)$$ - embedding
$$h_{v_2v_2}^t = LSTM(h_{v_2v_2}^{t-1}, e_{v_2v_2}^t, W_t^{lstm})$$ - lstm cell
Node LSTM
QUESTION
Obstacle是否仅在建边时与pedestrian存在不同,而使用nodeLSTM等都与pedestrian一致?
假设nodeLSTM的输出满足二维正态分布
同SRNN模型,(v_2)的nodeLSTM将用注意力机制整合来自(v_2)相邻点之间edgeLSTM输出和(v_2)的temporal edgeLSTM输出作为输入的一部分(公式中(H_{v_2}^t)就是整合得到),最终基于LSTM的输出是二维正态分布的假设,求出预测的位置或计算损失值(与Social LSTM类似)。
根据文章的解释,(x^t_{v_2})和(x^t_{v_2v_2})应该相等,即temporal edgeLSTM和nodeLSTM从st-graph所获取的features应该是一样的。