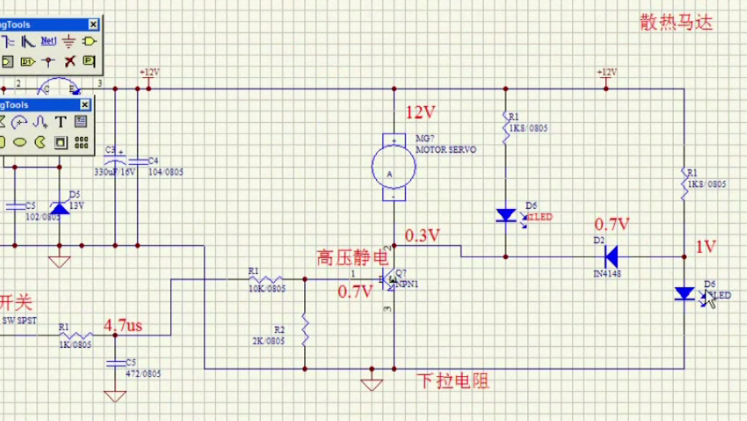
1.马达 MOTOR 可以等效成一个电感

为了当驱动电流截止时候,等效电感迅速放电,可反向并联一个二极管
2.电源模块: Q1作开关管,通过PWM调节Ve到+5V(也可以其他电压值)
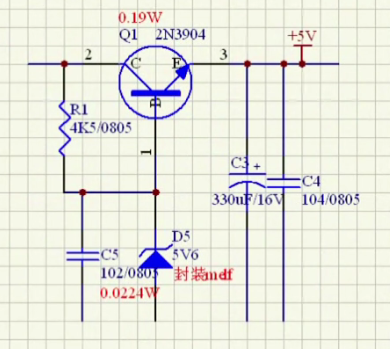 射极输出:
射极输出:
3三极管导通条件:Ibe>=1mA; Vbe>=0.7V.
三极管BE,CE,BC之间都有寄生电容存在。
4三极管防雷击设计:基级避免高阻态;基级接下拉电阻到GND。
左边接5V,为高;接到GND为低;若悬空,相当于串了个无穷大的电阻到5V或地,称为高阻态,电压随机,易受环境干扰,故一般要避免。

若左边接到5V或者GND,发生雷击,雷击高压就会 导入到电源中或者GND里(因为地和电源中阻抗都很小);若左侧悬空,高阻态,雷击高压只能往右侧器件上泄,易造成器件损坏。

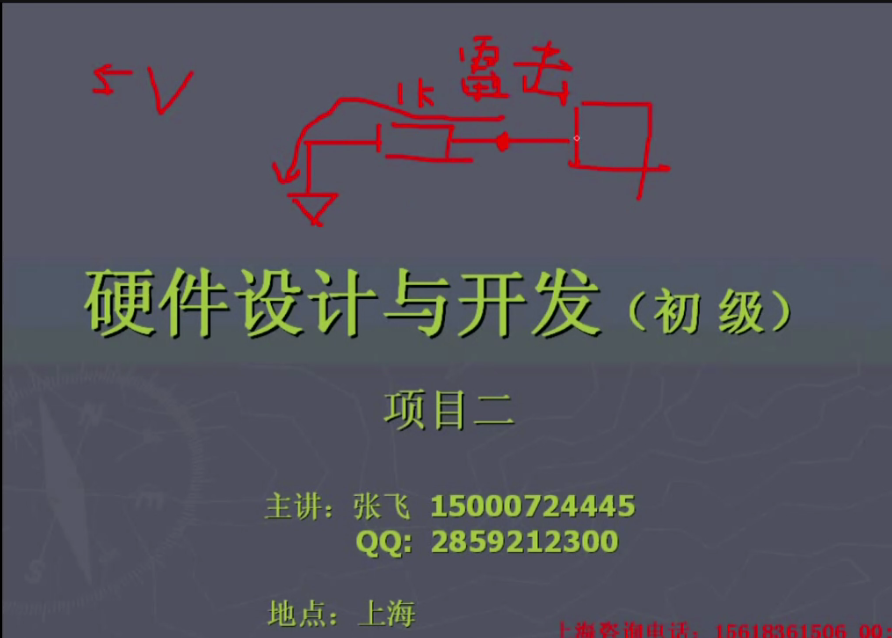
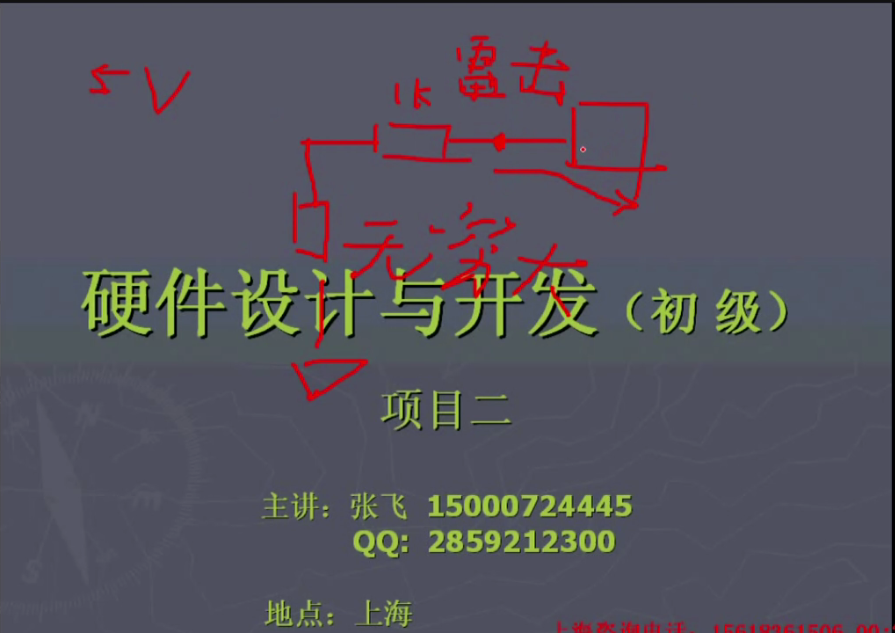
图1:接VCC 图2:接GND 图3:高阻态
所以,设计电路时候,尽量做成两态(高或者低),避免悬空高阻态。
三极管B级接下拉电阻R1到GND,两个作用:1.防雷击保护三极管 2.BE之间存在寄生电容,下拉电阻提供一个泄电荷通路,保护了三极管
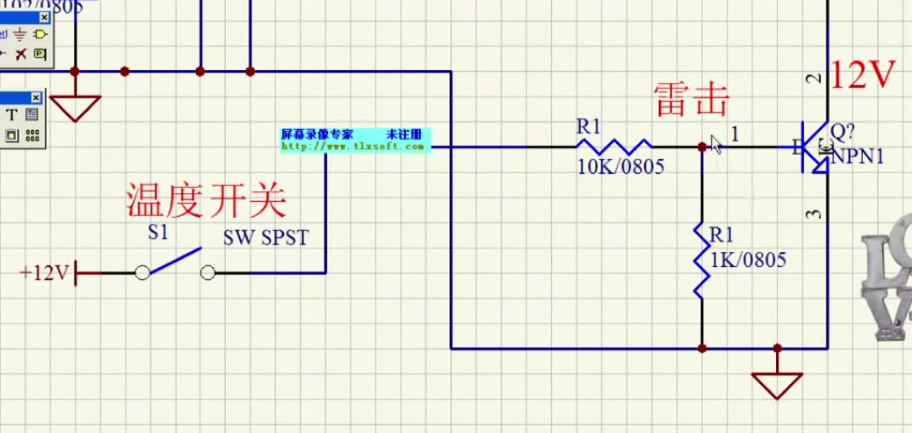
下拉电阻阻值计算:
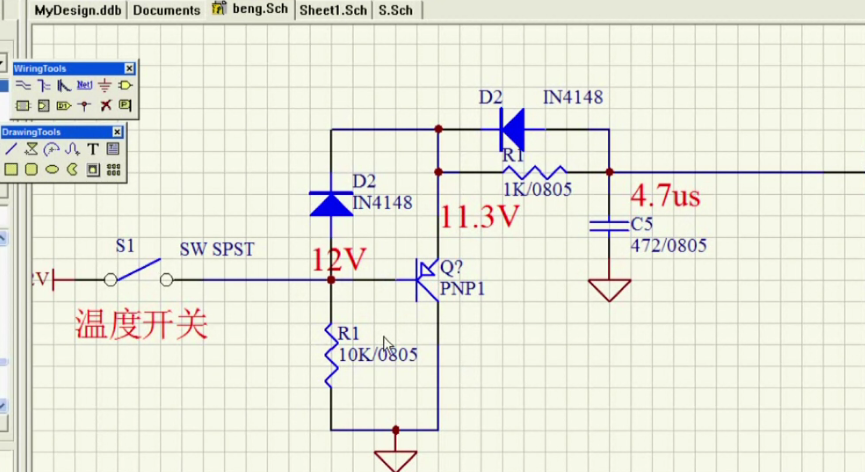
Vb暂时看做0.7V,R1压降就为11.3V,电流1.13mA,下拉电阻R=0.7/1.13*1000=620R,故下拉电阻最小为620R。
考虑到下拉电阻太小,流过的电流就大,会增加功耗;下拉电阻太大,分压导致Vb会太高容易击穿BE之间;BE之间寄生电容泄电荷时间不宜太长,故下拉电阻不宜过大。故需要综合考虑。一般取2K。
5.滤波
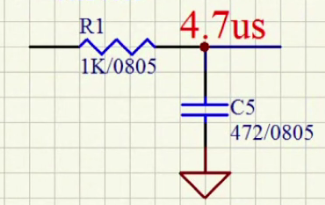
机械按键开关的时候,会有杂波(手抖),需要滤波。----接电容到GND (硬件延时滤波)
右上波形为不接电容时候,右点波形;右下波形为接了电容,电压不会突变,右点的波形。电容左边串联的电阻越大,电容越大,右下波形上升段越缓;反则反之。

右下波形充电电压上升时间(电容充放电时间): t3=5RC(实际上)但是为了简便,一般把作t3=RC. 一般杂波在1us内,故在t3内把杂波滤掉,t3需要大于1us,一般取t3=RC=5us。 已知R=1K,由此,C=5nF。取标称电容4.7nF。
马达运行红灯亮,不运行绿灯亮,这里利用了二极管D2的钳位特性(压降0.7V)。
NPN管:(上图)
负载放在C级,E级直接接到GND,比较好计算且可以工作在饱和区。集电极输出好算。
(三极管选择集电极输出模式,相当于一个恒压源)
(三极管选择射极输出模式,相当于一个恒流源)
P管集电极输出:

P管射极输出输出:

PNP管:
 应用电路:
应用电路: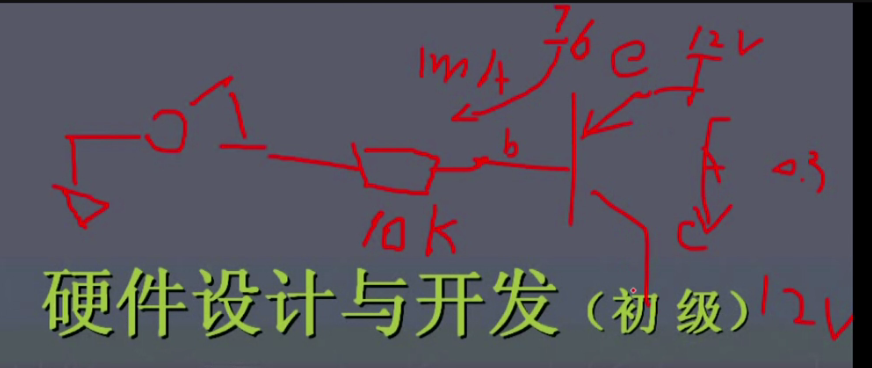
三极管的BE之间存在寄生电容,BE之间可看做一个二极管并联一个寄生电容。故压差小于0.7V以前先对电容充电。
N管射极输出:
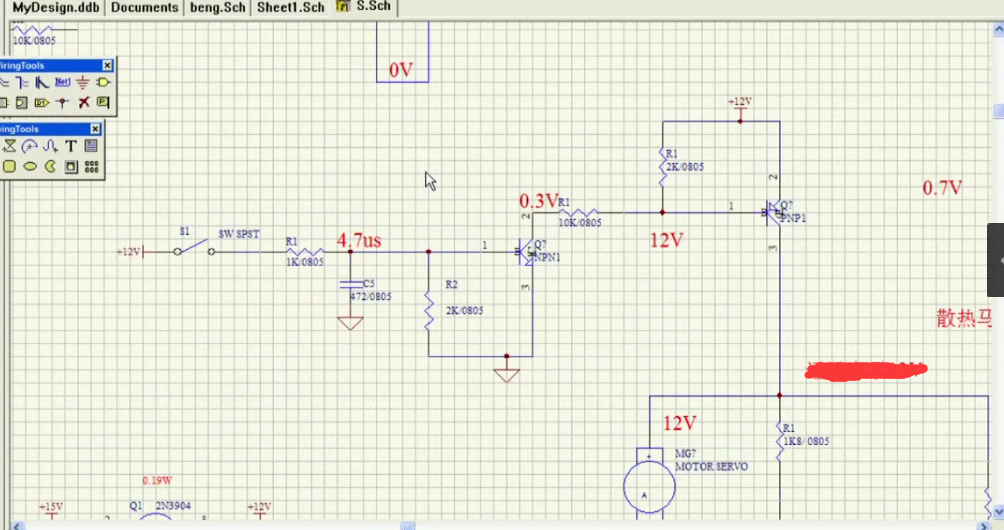
此处,左边的三极管单纯作电压变换作用,不需要饱和,Ibe不需1mA(需在上图R1和三极管B级之间串电阻,约20K可adj),但是Ice需要1mA;
右边的三极管作电流放大作用放大管,需要工作在饱和区,Ibe(也就是前级的Ice)需要1mA。
N管集电极输出:不适合 因为马达要12V压差,不好达到,和P管射级输出一样,马达的压降不到12V。
结论:(三极管作开关管)
P管适合集电极输出,(首选,因为电路简单)
N管适合射级输出。
RC低通滤波:电容充放电时间常数τ=RC=4.7us
鲁棒性:电路或者程序的强健性,当有扰动时候,是否还能正常工作。

为了当关断马达时,C5的电容的电压不影响马达,必须为其提供一个泄电荷的电路,于是就有了上两个图(右图为最终版)。
5.电感
特性1:电感电流不会突变
特性2:电感感应电流总是阻碍电流变化
特性3:电感是储能元件且本身不好耗能
特性4:UL=Ldi/dt,电感感应电动势与di/dt成正比。