0、关于HDFS的角色
在HDFS集群中,根据HDFS的组织架构,可以看出主要的角色包括Client、NameNode、DataNode、SecondaryNameNode ~
-
Client:客户端
- 文件切分:文件上传至HDFS集群时,Client将文件切分成一个个Block上传;
- 与NameNode交互,获取文件的定位信息;
- 与DataNode交互,读取或者写入数据;
- Client提供一些命令来管理HDFS,例如初次启动时格式化NameNode;
- Client有一系列的命令访问HDFS,比如对HDFS中的文件增删改查
-
NameNode:集群的Master,相当于集群的管理者
- 管理HDFS的名称空间;
- 配置副本策略;
- 管理数据块的映射信息;
- 处理客户端的读写请求
-
DataNode:集群的Slave,NameNode下达指令,DataNode执行实际的操作
- 存储实际的数据块(Block);
- 执行数据的读写操作
-
SecondaryNameNode:并非NamNode的热备。当NameNode节点宕机的时候,无法替换NameNode
- 辅助NameNode,例如定期合并Fsimage和Edits,并将其推送给NameNode;
- 辅助恢复NameNode
1、NN和2NN工作机制
问题引出:NameNode中的元数据是存储在哪里的?
首先,我们做个假设,如果存储在NameNode节点的磁盘中,因为经常需要进行随机访问,还有响应客户请求,必然是效率过低。因此,元数据需要存放在内存中。但如果只存在内存中,一旦断电,元数据丢失,整个集群就无法工作了。因此产生在磁盘中备份元数据的Fsimage。
这样又会带来新的问题,当在内存中的元数据更新时,如果同时更新Fsimage,就会导致效率过低,但如果不更新,就会发生一致性问题,一旦NameNode节点断电,就会产生数据丢失。因此,引入Edits文件(只进行追加操作,效率很高)。每当元数据有更新或者添加元数据时,修改内存中的元数据并追加到Edits中。这样,一旦NameNode节点断电,可以通过FsImage和Edits的合并,合成元数据。
注:(后面详解)
- Fsimage:NameNode内存中元数据序列化后形成的文件
- Edits:记录客户端更新元数据信息的每一步操作(可通过Edits运算出元数据)
但是,如果长时间添加数据到Edits中,会导致该文件数据过大,效率降低,而且一旦断电,恢复元数据需要的时间过长。因此,需要定期进行Fsimage和Edits的合并。如果这个操作由NameNode节点完成,又会效率过低。因此,引入一个新的节点SecondaryNamenode,专门用于FsImage和Edits的合并。
-
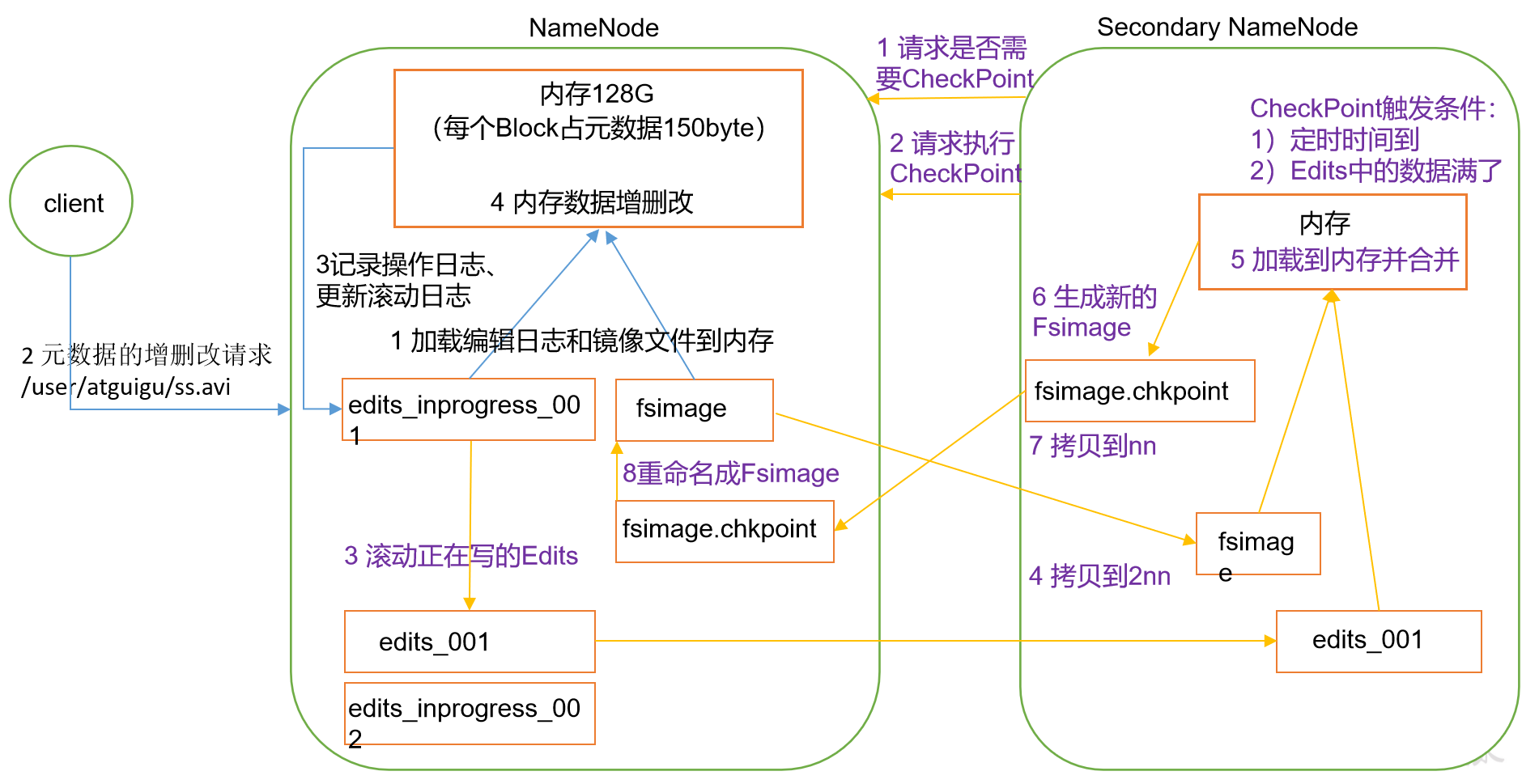
第一阶段:NameNode 启动
-
初次启动NameNode格式化后,创建Fsimage和Edits文件。如果不是第一次启动,直接加载Fsimage和Edits到内存;
-
客户端对元数据进行增删改的请求;
-
NameNode记录操作日志,更新滚动日志;
-
NameNode在内存中对元数据进行增删改
-
-
第二阶段:SecondaryNameNode工作
- SecondaryNameNode询问NameNode是否需要CheckPoint,直接带回NameNode是否检出结果;
- SecondaryNameNode请求执行CheckPoint;
- NameNode滚动正在写的Edits日志;
- 将滚动前的编辑日志和镜像文件拷贝到SecondaryNameNode;
- SecondaryNameNode加载编辑日志和镜像文件到内存合并;
- 生成新的镜像文件fsimage.chkpoint;
- 拷贝fsimage.chkpoint到NameNode;
- NameNode将fsimage.chkpoint重新命名成fsimage
总结:
NameNode启动时,先滚动Edits并生成一个空的edits.inprogress,然后加载Edits和Fsimage到内存中,此时NameNode内存就持有最新的元数据信息。Client开始对NameNode发送元数据的增删改的请求,这些请求的操作首先会被记录到edits.inprogress中(查询元数据的操作不会被记录在Edits中,因为查询操作不会更改元数据信息),如果此时NameNode挂掉,重启后会从Edits中读取元数据的信息。然后,NameNode会在内存中执行元数据的增删改的操作。此时,保证了内存中的元数据信息时最新的。
由于Edits中记录的操作会越来越多,Edits文件会越来越大,导致NameNode在启动加载Edits时会很慢,所以需要对Edits和Fsimage进行合并(所谓合并,就是将Edits和Fsimage加载到内存中,照着Edits中的操作一步步执行,最终形成新的Fsimage)。SecondaryNameNode的作用就是帮助NameNode进行Edits和Fsimage的合并工作。
SecondaryNameNode首先会询问NameNode是否需要CheckPoint(触发CheckPoint需要满足两个条件中的任意一个,定时时间到和Edits中数据写满了)。直接带回NameNode是否检查结果。SecondaryNameNode执行CheckPoint操作,首先会让NameNode滚动Edits并生成一个空的edits.inprogress,滚动Edits的目的是给Edits打个标记,以后所有新的操作都写入edits.inprogress,其他未合并的Edits和Fsimage会拷贝到SecondaryNameNode的本地,然后将拷贝的Edits和Fsimage加载到内存中进行合并,生成fsimage.chkpoint,然后将fsimage.chkpoint拷贝给NameNode,重命名为Fsimage后替换掉原来的Fsimage。NameNode在启动时就只需要加载之前未合并的Edits和Fsimage即可,因为合并过的Edits中的元数据信息已经被记录在Fsimage中。
2、CheckPoint 时机设置
2.1 通常情况下,SecondaryNameNode每隔一小时执行一次 [hdfs-default.xml]
<property>
<name>dfs.namenode.checkpoint.period</name>
<value>3600s</value>
</property>
2.2 一分钟检查一次操作次数,当操作次数达到1百万时,SecondaryNameNode执行一次检出合并
<property>
<name>dfs.namenode.checkpoint.txns</name>
<value>1000000</value>
<description>操作动作次数</description>
</property>
<property>
<name>dfs.namenode.checkpoint.check.period</name>
<value>60s</value>
<description> 1分钟检查一次操作次数</description>
</property >
总结:Edits和Fsimage,可以类比Redis的AOF和RDB文件,到了HBase那边也有类似的操作。天下文章一大抄,策略基本都是如此~