核心算法,是用 的那个 cordic 算法..
http://www.cnblogs.com/signal/archive/2012/11/13/2768140.html
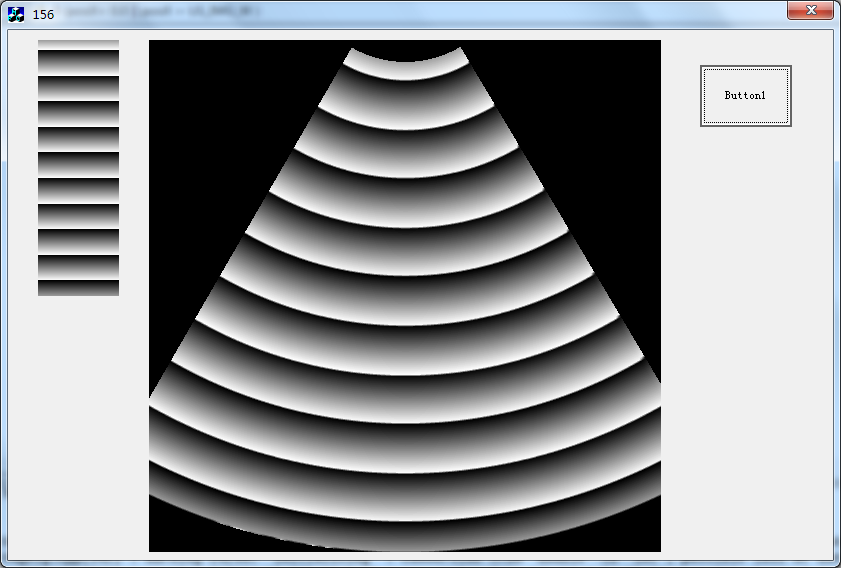
这里主要是想把算法弄到FPGA中去写的测试代码...
这里主要是贴关键代码:
void CTestImgDlg::OnImageCordic()
{
// TODO: Add your control notification handler code here
DWORD dwStart = GetTickCount();
int i;
int j;
for (i=0; i<m_HeightSW; i++)
{
for (j=0; j<m_WidthSW; j++)
{
// j = m_WidthSW/2;
int posX = i;
int posY = j;
BYTE val = this->GetImageCordic(posX,posY); --开始转换
m_pDataSW[i*m_WidthSW + j] = val;
}
}
CString str;
str.Format(" %d ", GetTickCount() - dwStart);
this->SetWindowText(str);
this->Invalidate();
}
#define MOV_POS_X (-256) //坐标变幻值
#define MOV_POS_Y (86)
#define US_IMG_W (81) // 原始图像的大小
#define US_IMG_H (256)
#define ANG_UNIT (60.0/(US_IMG_W - 1)) // 图像横像素所占角度
#define LEN_UNIT ((512 - 1 - 20)/(US_IMG_H*1.0)) // 图像坚像素所占长度
BYTE CTestImgDlg::GetImageCordic(int i, int j)
{
BYTE val = m_pDataSW[i*m_WidthSW + j];
// 直角坐标位置改变
double posX = i + MOV_POS_Y;
double posY = j + MOV_POS_X;
// posX = 300;
// posY = 300;
// 转为极坐标
double len;
double ang;
// cordic_int(i,j,len,ang);
cordic_double(posX,posY,len,ang);
// 换算为直角坐标的坐标
// double posX;
// double posY;
posX = ang/ANG_UNIT;
posY = len/LEN_UNIT;
posX = posX + US_IMG_W/2;
posY = posY - 56;
//最近邻的必要.........
// posX += 0.5;
// posY += 0.5;
// 没有落在图像上,则为黑色
if (posX < 0.0 || posX > US_IMG_W )
{
return 0;
}
if (posY < 0.0 || posY > US_IMG_H )
{
return 0;
}
// 下面是像素的计算--用的是简化计算, 把一个像素的落点分为8*8的可能区域,
// 如果要求更高,可以区分更细,而且不占什么时间, 不过我想没必要
int pointX = posX;
int pointY = posY;
//落点所在的区域
int X_c0 = (posX - pointX)*8;
int X_c1 = (posY - pointY)*8;
//取出四个点
int val00 = m_pDataUS[pointY * m_WidthUS + pointX];
int val01 = m_pDataUS[pointY * m_WidthUS + pointX + 1];
int val10 = m_pDataUS[(pointY+1) * m_WidthUS + pointX];
int val11 = m_pDataUS[(pointY+1) * m_WidthUS + pointX + 1];
//计算值--先求横向,再求纵向
int v1 = val00 + ((val01 - val00)>>3)*X_c0;
int v2 = val10 + ((val11 - val10)>>3)*X_c0;
val = v1 + ((v2 - v1)>>3)*X_c1;
// val = posY;
// 计算图像数值
return val;
}