Linux内核调用SPI驱动_实现OLED显示功能
0. 导语
进入Linux的世界,发现真的是无比的有趣,也发现搞Linux驱动从底层嵌入式搞起真的是很有益处。我们在单片机、DSP这些无操作系统的裸机中学习了这些最基本的驱动,然后用过GPIO时序去模拟、然后用那个芯片平台的外设去配置参数,到Linux的世界,对于底层的时序心中有数,做起来就容易很多。学习的过程就是不断的给自己出难题,然后去解决他,在未来工程里面遇到这个问题,就瞬间可以解决了,这就是经验的积累吧。
Linux驱动目录,包含了底层写好的SPI驱动,我们需要想办法调用人家写好的SPI驱动,就不需要写IO口模拟SPI时序了。在网络上,对于SPI应用级的驱动倒是很多,平台级驱动很少,而我们想把平台级驱动二次包装在我们的字符设备驱动中,对于用户,无需考虑SPI通信写协议还是写命令,只需要使用read和write函数写显示的内容就好了。
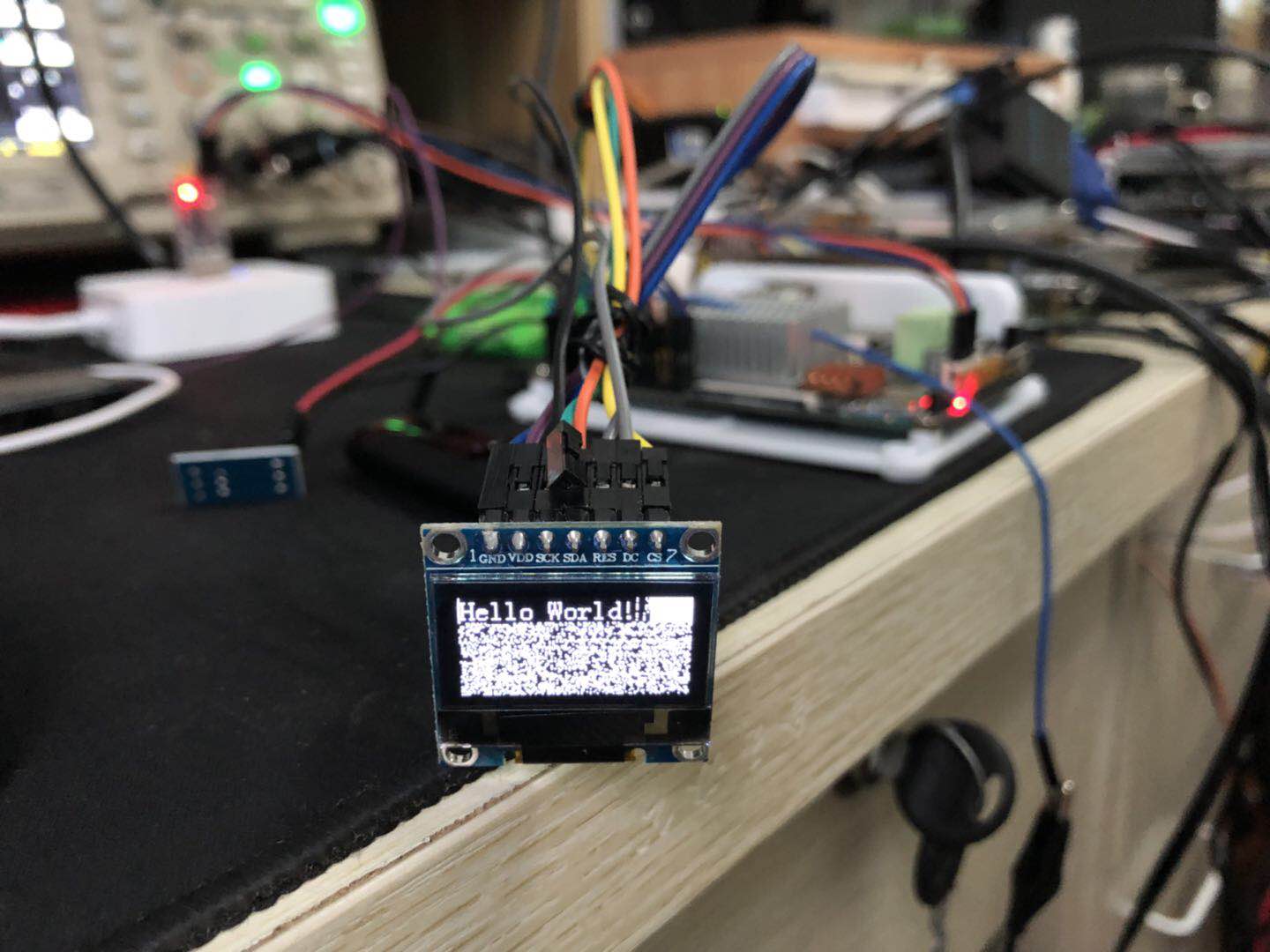
基于这样的想法,我们找了一个使用SPI协议的从器件来实现,我手里面有OLED设备,是支持SPI协议在OLED显示面板上显示字符的。所以搭建一个实验平台,做一个OLED的demo,未来所有的从SPI设备都遵循这个框架(而且我们在这个驱动中加入 了内核机制的驱动的自旋锁、互斥体的内核操作)。
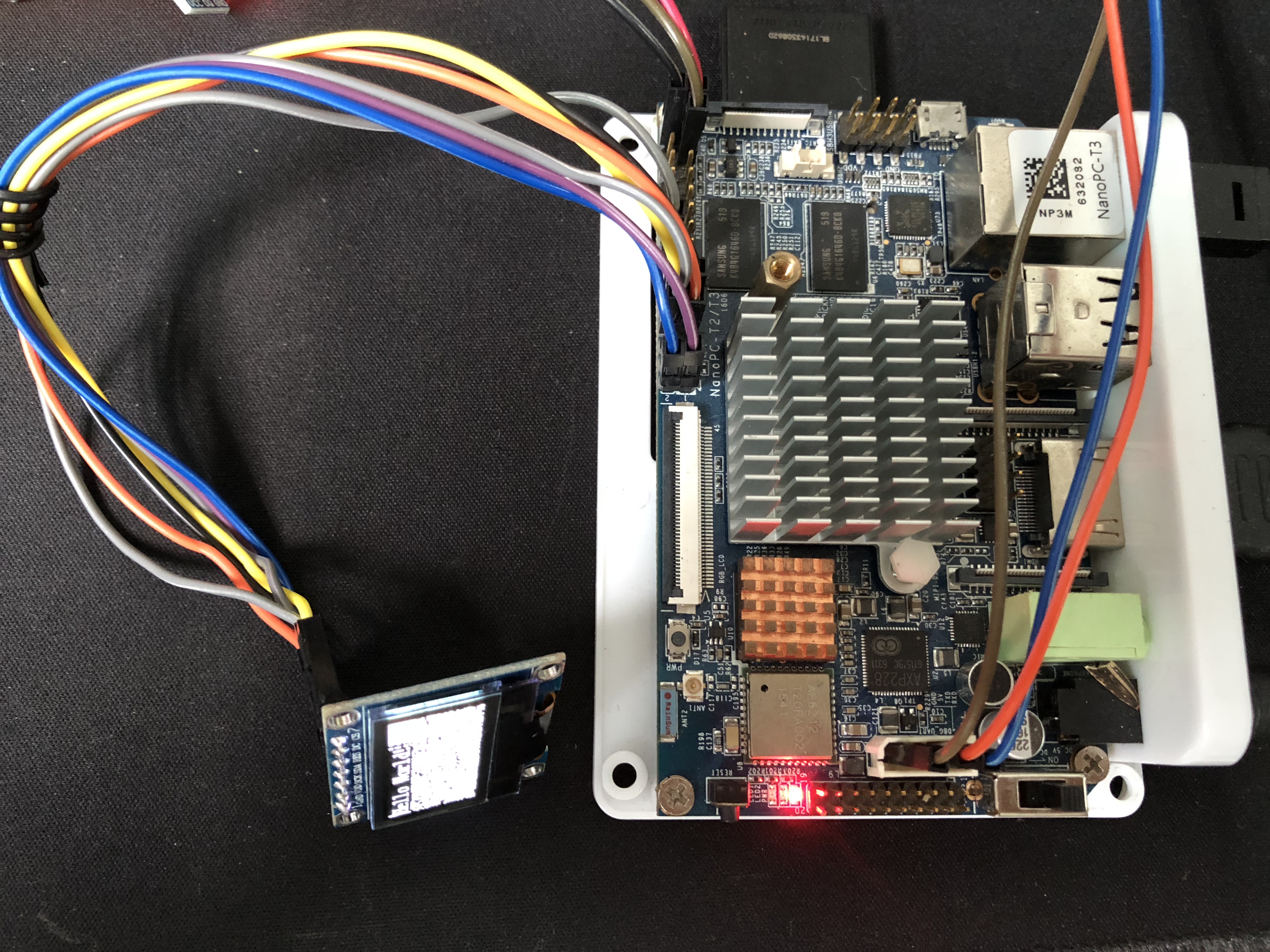
实验平台如下:
- ARM板子: 友善之臂Nano-T3 (CortexA53架构, Samsung s5c6818)
- ARM的Linux系统:Ubuntu 16.04.2 LTS
- 编译调试Linux:Ubuntu 16.04.3 LTS amd64版本
- 编译器:arm-cortexa9-linux-gnueabihf-gcc (64位版本)
- 从设备:OLED (SPI模式)
1. 驱动架构模型
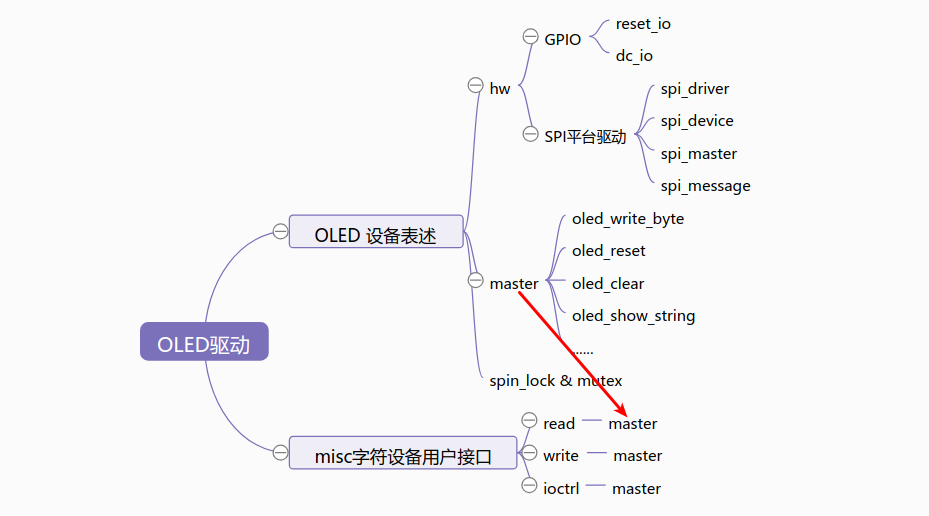
总体驱动架构模型如图所示,对于OLED驱动的表述,主要包含两个方面,一个是OLED这个传感器的抽象;一个是,misc字符驱动的注册,里面有read和write函数,供用户接口调用,(在read和write函数里面使用OLED设备表述里面的master控制oled的行为就好了,比如显示,清除,复位之类的)。
oled设备表述,为OLED设备的抽象,里面包含对硬件的描述和SPI的描述,还有对于写时序的时候使用自旋锁和互斥体对时序进行的保护,master为对oled设备的基本操作,包含复位,写字节等等。
在本博客中最重要的就是SPI平台驱动的使用,问题也非常的清晰,我们如何使用linux内核驱动里面写好的spi,参考Linux SPI API文档里面,那么复杂的结构体,哪些是在驱动中要使用,哪些是在应用级程序中使用的。网络上的资料大部分都是应用级的,没有讲述在字符驱动中二级注册spi驱动的,而我们对于OLED这样的SPI设备,则需要在驱动中调用,让用户无需关心任何SPI的调用。
在驱动模型中,master操作结构体里面,oled_write_byte这样的函数里面则需要调用系统级SPI,问题就非常明确,就在写byte的时候使用SPI。
那么我们就需要在注册完字符设备的时候,向内核注册spi,然后我们使用该SPI对OLED操作。
2. linux SPI驱动的注册
Linux Drivers目录具备一定的通用性也具备各个架构区别不同,在包含头文件的时候,要包含
- 通用性的linux spi文件
#include <linux/spi/spi.h> - mach级特性文件
#include <mach/slsi-spi.h>
同时也要关注:
- plat级的
device.c文件,里面包含了spi_board信息的模板,用这个可以省去了很多麻烦。
我们使用的oled_hw_t, 图上的结构(OLED->hw)的具体定义,里面定义了io口的编号和spi的各种机制,注意谁是指针,谁是实体。
struct oled_hw_t
{
unsigned int res_io_num;
unsigned int dc_io_num;
struct spi_transfer spi_trans;
struct spi_message spi_msg;
struct spi_driver *spi_drv;
struct spi_device *spi_dev;
struct spi_master *spi_master_bus;
};
我需要定义以下机制:
-
spi_driver
spi_driver会向内核申请总线处理的权限,当我们加载驱动的时候,在ARM机器的linux上的
/sys/bus/spi/drivers目录下会看到申请SPI驱动内核的名字。
static const struct spi_device_id oled_spi_id[] = { {“oledspi”, 1}, {}, }; static struct spi_driver sp6818_spi_driver = { .driver = { .name = "oled_spi", .bus = &spi_bus_type, .owner = THIS_MODULE, }, .probe = oled_bus_spi_probe, .remove = __devexit_p(oled_bus_spi_remove), .suspend = oled_bus_spi_suspend, .id_table = oled_spi_id, }; MODULE_DEVICE_TABLE( spi, oled_spi_id );按照spi_driver驱动的格式进行,补充好probe和remove,suspend函数,但是这里存在一个问题,当我们应该spi_register_driver的时候,正常应该执行probe函数里面的内容,但是这个不执行,怀疑是因为二级包装问题,我们的主调还是使用misc驱动的字符设备 __init标示在 misc的初始化函数上,而导致不进入spi_driver的probe函数。
-
spi_device
spi_device和spi_driver是成对出现的,在spi_driver注册完之后,则需要对spi_deivce进行配置,我们首先要声明一个spi_device,一会儿借助linux 的drivers 里面的platform级的deivce.c文件中的spi_board来注册我们的spi_device。
定义spi_device驱动,这里面的配置信息可以瞎填,我们使用spi_board中的配置信息会覆盖这些信息。
static struct spi_device sp6818_spi_device = { .mode = SPI_MODE_3, .bits_per_word = 16, .chip_select = SPI_CS_HIGH, .max_speed_hz = 100000, };然后现在的工作就是如何spi_device和我们刚才spi_driver进行绑定了。
定义下面的信息:
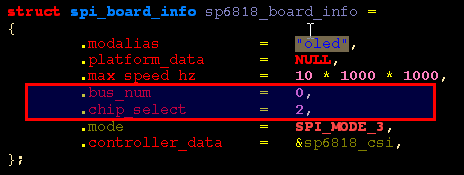
static struct s3c64xx_spi_csinfo sp6818_csi = { .line = OLED_CS_IO, .set_level = gpio_set_value, .fb_delay = 0x2, }; struct spi_board_info sp6818_board_info = { .modalias = "oled", .platform_data = NULL, .max_speed_hz = 10 * 1000 * 1000, .bus_num = 0, .chip_select = 2, .mode = SPI_MODE_3, .controller_data = &sp6818_csi, };这个模板就定义在platform级文件夹的device.c里面,我们按照模板的定义方式在我们的驱动文件里面也定义一个,在s3c64xx_spi_csinfo sp6818_csi中定义的是片选信号的IO口,这个IO口根据硬件原理图来的,然后定义spi_board_info结构体,这些都是为spi_device做准备的,spi的配置信息也由此写入。
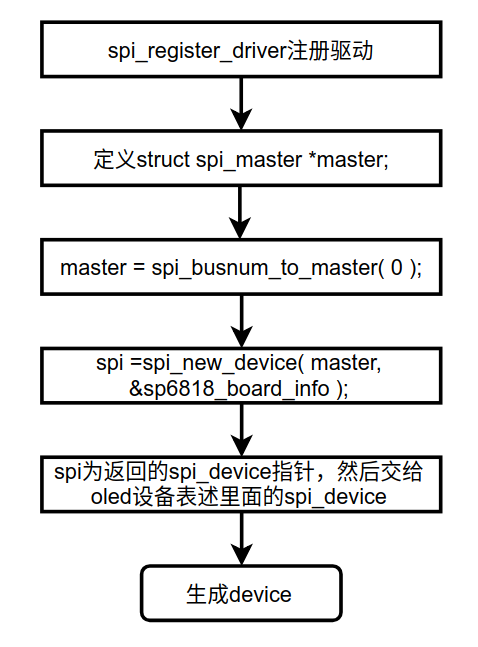
按照这个顺序进行:程序就如同下面的参考,后面会给出完成程序。
static void oled_module_hw_init( OLED *self ) { int ret,i; struct spi_master *master; struct spi_device *spi; self->hw.res_io_num = OLED_RES_IO; self->hw.dc_io_num = OLED_DC_IO; printk( DRV_NAME " register spi driver... " ); self->hw.spi_drv = &sp6818_spi_driver; ret = spi_register_driver( self->hw.spi_drv ); if ( ret < 0 ) { printk( DRV_NAME " error: spi driver register failed" ); } printk( DRV_NAME " master blind spi bus. " ); master = spi_busnum_to_master( 0 ); master->num_chipselect = 4; if ( !master ) { printk( DRV_NAME " error: master blind spi bus. " ); ret = -ENODEV; return ret; } printk( DRV_NAME " new spi device... " ); spi = spi_new_device( master, &sp6818_board_info ); if ( !spi ) { printk( DRV_NAME " error: spi occupy. " ); return -EBUSY; } self->hw.spi_master_bus = master; self->hw.spi_dev = spi; printk( DRV_NAME " hw init succussful... " ); }
到此,完成,spi的注册。
spi_device的注册里面,会在ARM上面的Linux的/sys/bus/spi/devices下面出现我们注册的device设备,如图:

spi0.2就是我们所注册的device设备,这个命名就和我们的spi_board_info有关系了,
如果,bus_num = 5, chip_select = 20, 那么注册的device就是spi5.20了。这里还有个坑,就是片选信号的数值大小和master里面的片选num的问题,linux的spi api要求,master的num-chipselect必须大于 spi_board_info里面chip_select的数值。你也看到上面初始化程序,为什么master->num_chipselect = 4; 这个语句了。
3. SPI 的使用
在驱动里面对于spi的使用就非常简单了。例如我们oled的write_byte函数:
static void oled_module_write_byte( OLED* self,
unsigned int dat,
enum data_type_t type)
{
int status;
unsigned int write_buffer[1];
if ( type == ENUM_WRITE_TYPE_CMD )
self->master->set_dc_low( self );
else
self->master->set_dc_high( self );
write_buffer[0] = dat;
write_buffer[1] = 0xFF;
status = spi_write( self->hw.spi_dev, write_buffer, 1 );
if ( status )
dev_err( &self->hw.spi_dev->dev, "%s error %d
", __FUNCTION__, status );
}
使用spi_write函数就好了。
4. 结语
探索Linux SPI真是很费劲,这些花了好多时间,经历了无数次的实验,因为是驱动,经常在调试过程中出现暴栈、指针乱指,这些对于Linux内核都是毁灭性的错误,只能重启ARM Linux。光重启Linux就好几百次。不过总算是有成果,对于Linux驱动的学习还在进行,下次可能要实验I2C的平台驱动,找到规律和不同,再加上一些内核的操作,比如并发和IO等,在学习中成长。
源代码
Github地址:https://github.com/lifimlt/carlosdriver
见 oled.c oled.h 和oledfont.h三个文件
参考文献:
[1] Linux org, Serial Peripheral Interface (SPI),
[2] 郝过, Linux设备驱动模型SPI之二, 2016年2月28日
[3] invo-tronics , SPI Driver for Linux Based Embedded System, 2014年9月30日
[4] Linux学习之路, spi驱动框架全面分析,从master驱动到设备驱动, 2016年6月22日