路径跟踪是无人车研究方向的一项关键技术。路径跟踪控制算法是指能够使无人车按照预设路径,安全稳定行驶的控制方法。
建立无人车路径跟踪模型
预设无人车在A、B两点间,当前位置为D点,航向为hF
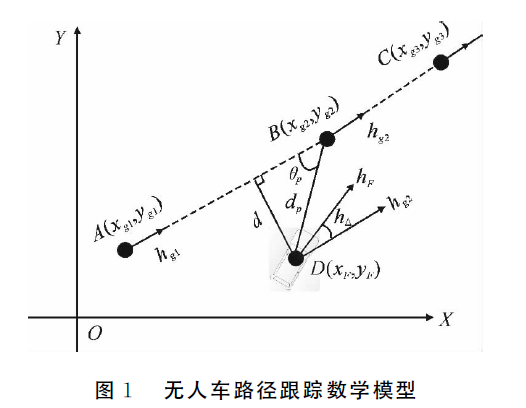
可以得到BD的距离dp ;D到AB的垂线段距离d;夹角θp的值;航向角差h△=hf-hg2;
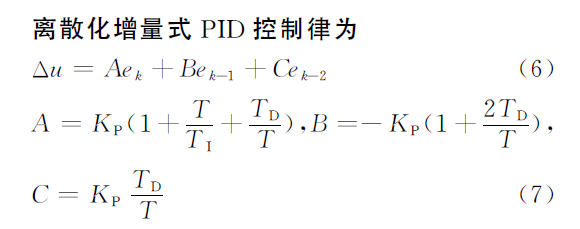
允许的误差范围为0.2m,在误差范围内和误差范围外的控制策略是不同的
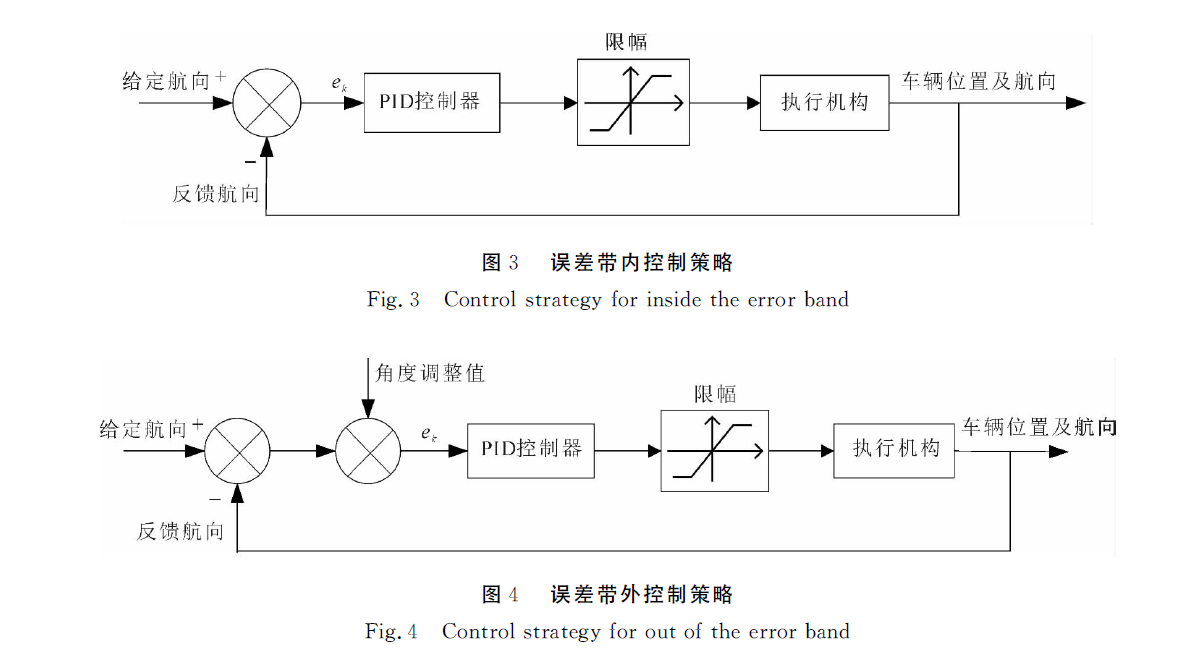
ek为航向给定量rk和反馈量ck的差值,控制器PID的输入量,δ为角度调整值
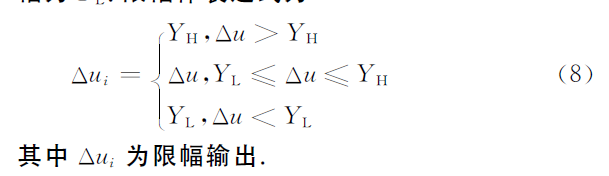
△u为控制器输出,Kp为比例系数,TI、TD分别为积分和微分时间,KI=1/TI;KD=TD;KI、KD分别为积分系数和微分系数
在PID算法中引入积分环节的主要目的是为了减小系统静差,提高系统的控制精度。
微分系数的引入主要是为了改善闭环系统的稳定性和动态响应速度,这是由于微分系统主要影响系统误差变化速率。
由于PID控制器输出是方向盘转角,车辆方向不会瞬时改变太大,因此对其采取限幅措施,得到限幅输出。即方向盘转角每次最多变化的角度。
控制算法的步骤:
1、计算ek的值:若车在误差带内,ek=rk-ck;若车在误差带外,ek=rk-ck-δ
2、确定积分系数:若ek的值大于ξ时,KI=0;若ek的值小于ξ时,KI等于设定值
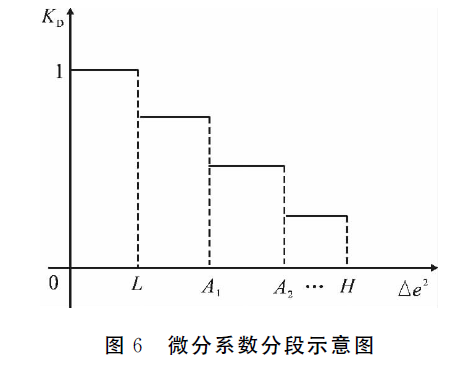
3、确定微分系数:定义误差变动量的平方值为Δe2=(ek -ek-1)2;KD的值由微分系数分段图得到
4、计算控制器输出△u,确定限幅输出