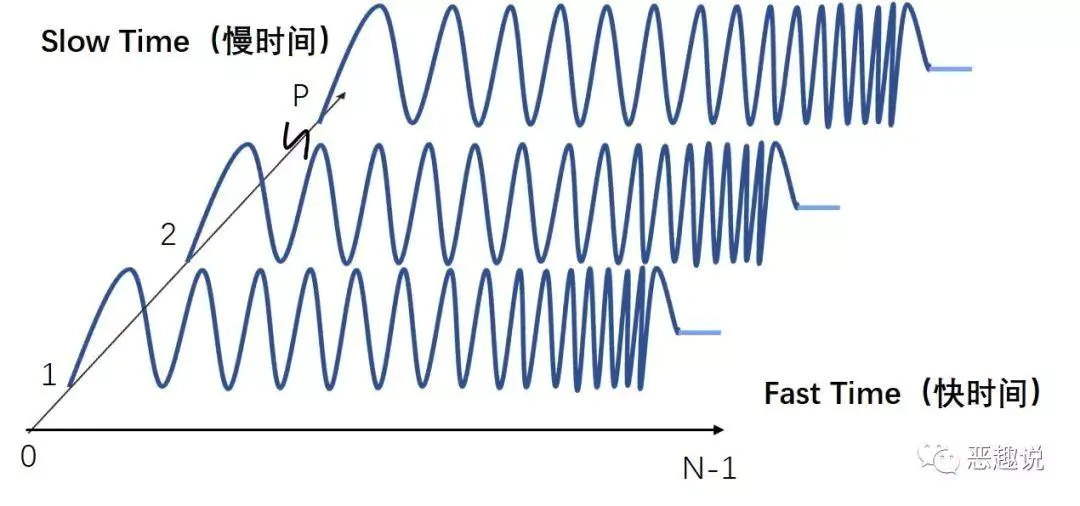
首先理解两个在时间维度上的采样,对于一个脉冲雷达,其发射的周期性脉冲序列,我们将每个脉冲序列的接收回波分别按行存储,例如第一个脉冲的接收回波被放置在第一行,同样的第二个脉冲的接收回波则被放置在第二行,以此类推。这样的存储方法为理解信号处理的过程奠定了很好的基础模型,因此,我们将按照行的方向看过去的维度定义为快时间维度,另外,由于行与行之间的数据采样间隔往往是大于脉冲持续时间,所以将按照列的方向看过去的维度定义为慢时间维度。
下面需要思考的问题是,对于接收的单脉冲回波应当以多快的速度进行采样?即快时间维的采样率? 对于整个脉冲串回波即慢时间维,又是如何采样的?
对于快时间维的采样率,因为距离维的接收信号可以看作是距离向反射率函数与发送波形调制函数的卷积。也即是快时间维接收信号的带宽受到发射脉冲带宽的限制。因此,快时间维度的奈奎斯特采样率为发射脉冲的带宽。即
![]()
因此,采样间隔
![]()
因此,脉冲雷达的距离单元间隔(也就是距离分辨率)为

进一步的有
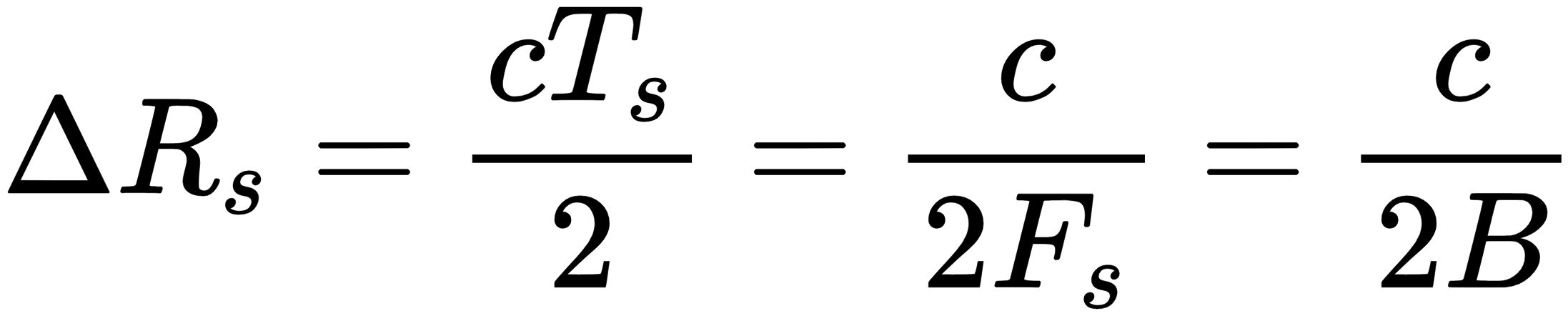
值得注意的是,连续波雷达(包括采用步进频信号的穿墙雷达和采用线性调频信号的毫米波雷达)的距离分辨率也为上式。因此,对于所有的雷达体制,距离分辨率的表达式都是上式。
而关于发射脉冲的带宽B,这里需要说明下。显然在时域中,单个脉冲是时限信号。如果单个脉冲是时长为tao的正弦信号,那么对应频谱为sinc函数。那么其带宽B一般表达为3dB带宽:0.89/tao Hz, 或者瑞丽带宽:1/tao Hz, 或者第一零点间带宽2/tao Hz。也就是说单个脉冲的长度确定了,那么其信号的有效带宽就确定了。这里需要说明下的是,是因为正弦信号被截断了,变成了时限信号,因此其不再是单频点信号,而是一个具有带宽的信号。
另外,对于慢时间维度的采样率,实际就是信号的脉冲重复频率(PRF),显然有
![]()
假如我们采集了M个脉冲串,采集数据需要的时间为M·PRI,通常把这个时间称为相参处理时间(CPI),因此CPI即表示相参处理时间,也表示采集得到的二维数据矩阵。
当雷达和被检测目标之间存在相对运动时,连续回波的相位会随着样本不断变化,即慢时间维度的信号会具有非零的多普勒带宽。因此,选择脉冲重复间隔的关键是避免由频谱搬移所造成的混叠而保留多普勒谱信息。其中的非零多普勒带宽存在两个来源,一个是探测区域内物体的运动,另外一个是雷达的运动。如果探测区域是我们常见的交通场景,那么目标的运动即有可能为交通工具的运动。如果探测的区域是一般的杂波区域,这个时候的运动可能就是来自草或者树叶随风飘动,海浪摆动,下落的雨滴等等。在慢时间轴上的奈奎斯特采样率的要求就是脉冲重复频率PRF至少等于慢时间信号的带宽。而慢时间信号的带宽是多普勒带宽。多普勒带宽是*似为*台运动产生的带宽和被测场景自身带宽的和。也就是说多普勒带宽取决于目标和雷达的相对运动速度。因此慢时间信号所选择的(或者说所设计的)PRF不应该小于这个多普勒带宽,以满足奈奎斯特采样定理。
上面这段话也表明了对于一个雷达系统,脉冲重复频率PRF决定了系统的测速性能。