ARM JTAG 调试原理
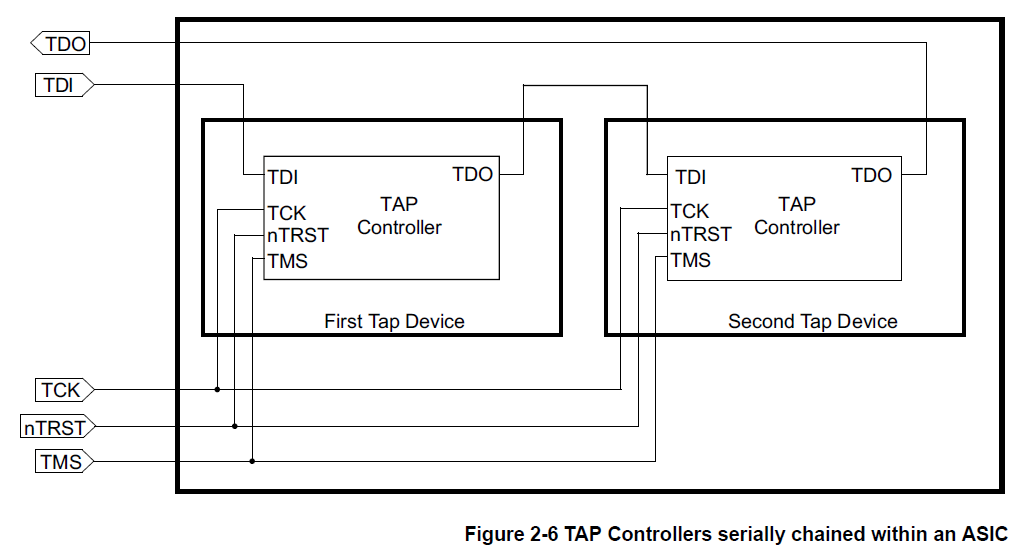
JTAG的接口是一种特殊的4/5个接脚接口连到芯片上 ,所以在电路版上的很多芯片可以将他们的JTAG接脚
通过Daisy Chain的方式连在一起,并且Probe只需连接到一个“JTAG端口”就可以访问一块印刷电路板上的所有IC。
这些连接引脚是:
- TDI(测试数据输入)
- TDO(测试数据输出)
- TCK(测试时钟)
- TMS(测试模式选择)
- TRST(测试复位)可选。
因为只有一条数据线,通信协议有必要像其他串行设备接口,如SPI一样为串列传输。
时钟由TCK引脚输入。配置是通过TMS引脚采用状态机的形式一次操作一位来实现的。
每一位数据在每个TCK时钟脉冲下分别由TDI和TDO引脚传入或传出。
可以通过加载不同的命令模式来读取芯片的标识,对输入引脚采样,驱动(或悬空)输出引脚,
操控芯片功能,或者旁路(将TDI与TDO连通以在逻辑上短接多个芯片的链路)。
TCK的工作频率依芯片的不同而不同,但其通常工作在10-100MHz(每位10-100ns)。
当在集成电路中进行边界扫描时,被处理的信号是在同一块IC的不同功能模块间的,而不是不同IC之间的。
TRST引脚是一个可选的相对待测逻辑低电平有效的复位开关——通常是异步的,但有时也是同步的,依芯片而定。
如果该引脚没有定义,则待测逻辑可由同步时钟输入复位指令而复位。
尽管如此,极少消费类产品提供外部的JTAG端口接口,但作为开发样品的残留,
这些接口在印刷电路板上十分常见。在研发后,这些接口常常为反向工程提供了非常良好的途径。
Test Clock Input (TCK)
TCK为TAP的操作提供了一个独立的、基本的时钟信号,TAP的所有操作都是通过这个时钟信号来驱动的。
Test Mode Selection Input(TMS)
TMS信号用来控制TAP状态机的转换。通过TMS信号,可以控制TAP在不同的状态间相互转换。TMS信号在TCK的上升沿有效。
Test Data Input(TDI)
TDI是数据输入的接口。所有要输入到特定寄存器的数据都是通过TDI输入端口串行输入的(由TCK驱动)。
Test Data Output(TDO)
TDO是数据输出的接口。所有要从特定的寄存器中输出的数据都是通过TDO输出端口串行输出的(由TCK驱动)。
Test Reset Input(TRST)
TRST可以用来对TAP Controller进行复位(初始化)。
不过这个信号接口在IEEE 1149.1标准里是可选的,因为通过TMS也可以对TAP Controller进行复位(初始化)操作。
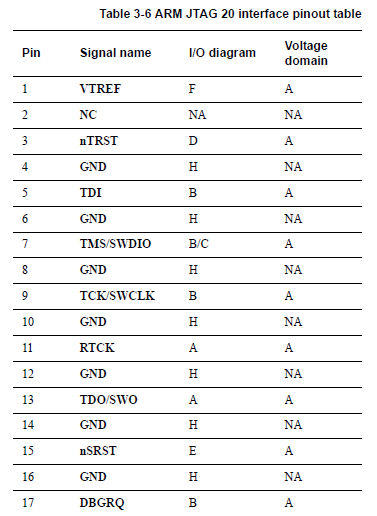
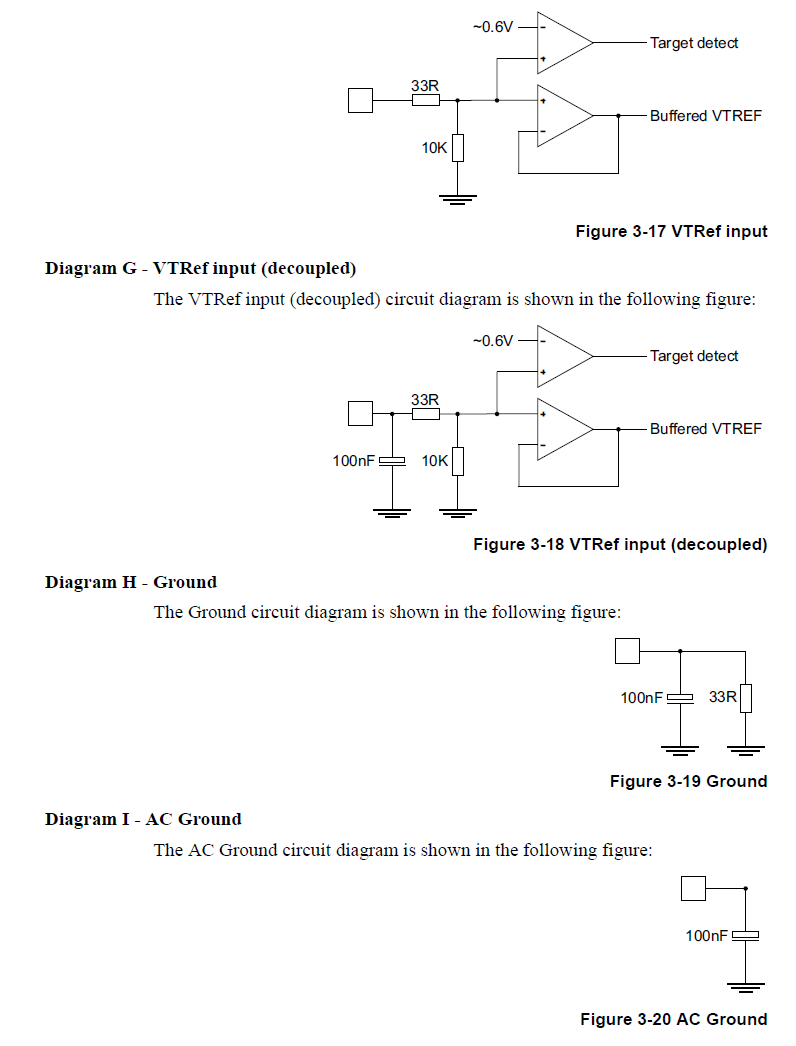
(VTREF) :接口信号电平参考电压一般直接连接Vsupply。
这个可以用来确定ARM的JTAG接口使用的逻辑电平(比如3.3V,还是5.0V)
Return Test Clock ( RTCK) :
可选项,由目标端反馈给仿真器的时钟信号,用来同步TCK信号的产生,不使用时直接接地。
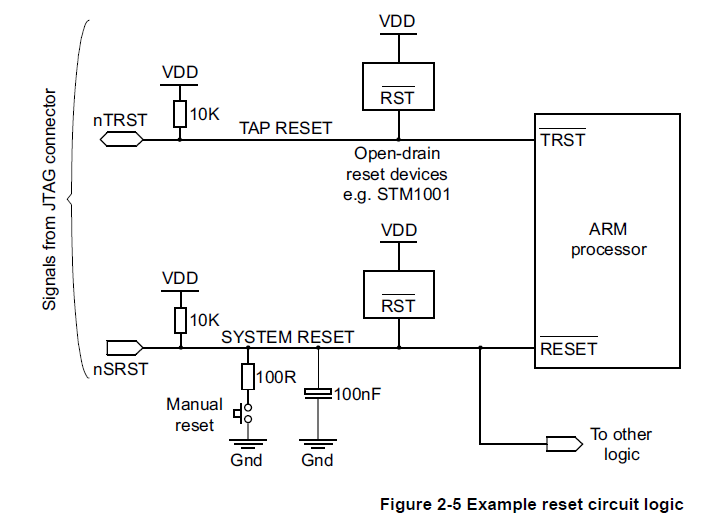
System Reset ( nSRST):
可选项,与目标板上的系统复位信号相连,可以直接对目标系统复位。
同时可以检测目标系统的复位情况,为了防止误触发应在目标端加上适当的上拉电阻。

Note
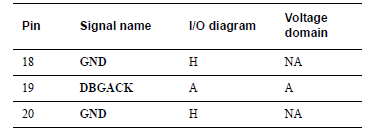
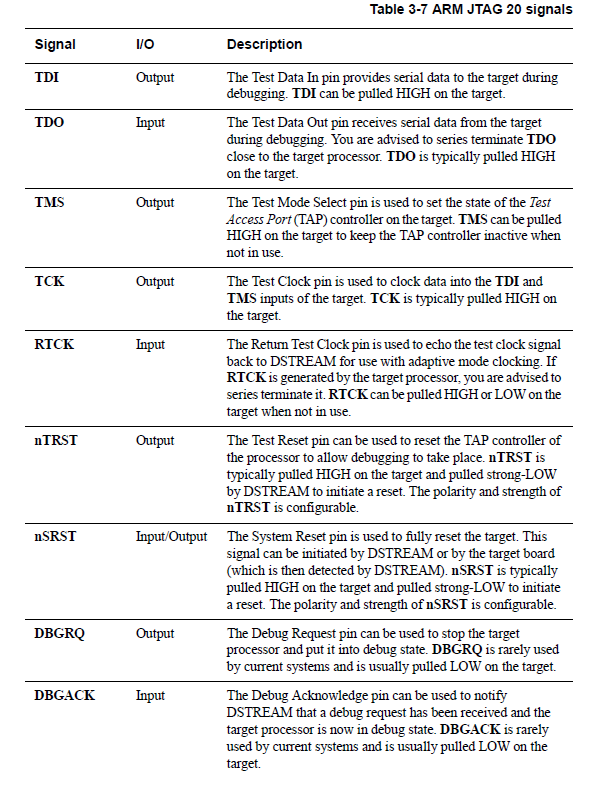
• The signals TDI, TMS, TCK, RTCK and TDO are typically pulled up on the target board to keep them stable when the debug equipment is not connected.
• DBGRQ and DBGACK are typically pulled down on the target.
• If there is no RTCK signal provided on the processor, it can either be pulled to a fixed logic level or connected to the TCK signal to provide a direct loop-back.
• All pull-up and pull-down resistors must be in the range 1K-100KΩ.
• The VTREF signal is typically connected directly to the VDD rail. If a series resistor is used to protect against short-circuits, it must have a value no greater than 100Ω.
• To improve signal integrity, it is good practice to provide an impedance matching resistor on the TDO and RTCK outputs of the processor.
The value of these resistors, added to the impedance of the driver must be approximately equal to 50Ω.
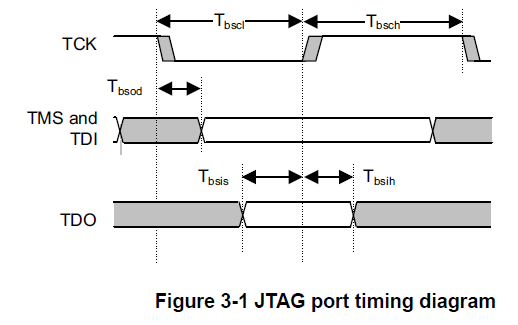
In a JTAG device that fully complies to IEEE1149.1-2001, TDI and TMS are sampled on the rising edge of TCK,
and TDO changes on the falling edge of TCK.
To take advantage of these properties, DSTREAM samples TDO on the rising edge of TCK and changes its TDI and TMS signals on the falling edge of TCK.
This means that with a fully compliant target, issues with minimum setup and hold times can always be resolved by decreasing the TCK frequency,
because this increases the separation between signals changing and being sampled.
Note
There are no separate timing requirements for adaptive clocking mode,
because the minimum Tbsch and Tbscl times are identical and are the same as for non-adaptive clocking.
Tbsis and Tbsih are relative to RTCK rising, and not TCK rising, as RTCK is used to sample TDO in adaptive clocking mode.
The only real timing difference is that in adaptive mode,
DSTREAM samples TDO on the rising edge of RTCK and not TCK, so TDO timing is relative to RTCK.
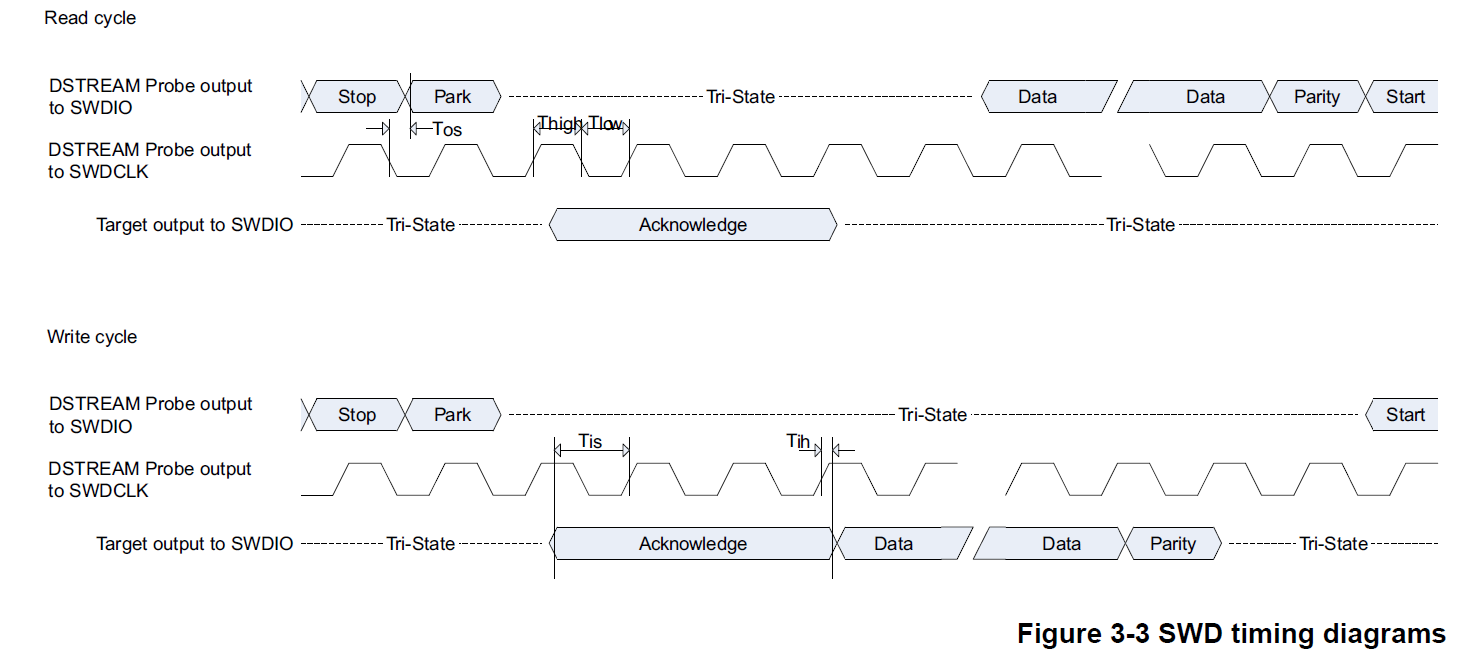
The debug software enables you to change the TCK frequency.
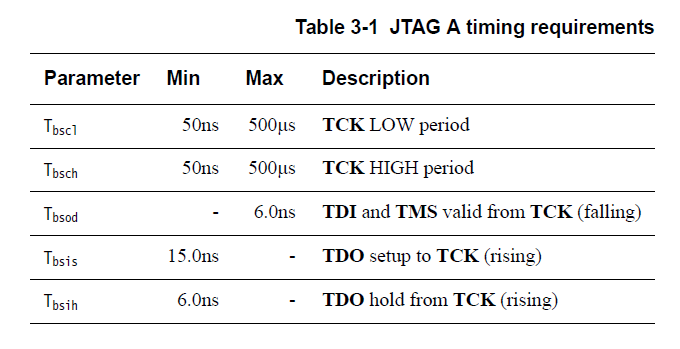
The TCK LOW:HIGH mark-space ratio is always 50:50.
The other parameters must be considered with the specific values of Tbscl and Tbsch that you have chosen.
The default values for an autoconfigured single-TAP system are, nominally, Tbscl=50ns and Tbsch=50ns.
• Tbsod is the maximum delay between the falling edge of TCK and valid levels on the TDI and TMS DSTREAM output signals.
The target samples these signals on the following rising edge of TCK
and so the minimum setup time for the target, relative to the rising edge of TCK, is Tbscl–Tbsod.
• Tbsis is the minimum setup time for the TDO input signal, relative to the rising edge of TCK when DSTREAM samples this signal.
The target changes its TDO value on the previous falling edge of TCK
and so the maximum time for the target TDO level to become valid, relative to the falling edge of TCK, is Tbscl–Tbsis.
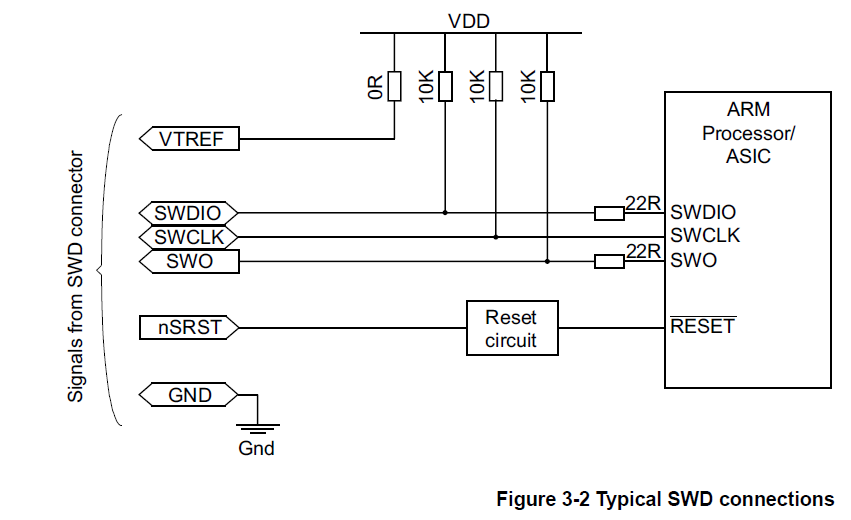
The SWDIO, SWCLK and SWO signals are typically pulled up on the target to keep them stable when the debug equipment is not connected.
• All pull-up resistors must be in the range 1K-100KΩ.
• The VTREF signal is typically connected directly to the VDD rail. If a series resistor is used to protect against short-circuits, it must have a value no greater than 100Ω.
• To improve signal integrity, it is good practice to provide an impedance matching resistor on the SWDIO and SWO outputs of the processor.
The value of these resistors, added to the impedance of the driver must be approximately equal to 50Ω.



OPEN-JTAG 开发小组
1 前言
这篇文章主要介绍 ARM JTAG 调试的基本原理。
基本的内容包括了 TAP (TEST ACCESS PORT) 和 BOUNDARY-SCAN ARCHITECTURE 的介绍,
在此基础上,结合 ARM7TDMI 详细 介绍了的 JTAG 调试原理。
这篇文章主要是总结了前段时间的一些心得体会,希望对想了解 ARM JTAG 调试的网友们 有所帮助。
我个人对 ARM JTAG 的理解还不是很透彻,在文章中,难免会有偏失和不准确的地 方,
希望精通 JTAG 调试原理的大侠们不要拍砖,有什么问题提出来,我一定尽力纠正。
同时 也欢迎对 ARM JTAG 调试感兴趣的朋友们一起交流学习。
2 IEEE Standard 1149.1 - Test Access Port and Boundary-Scan Architecture
既然是介绍 JTAG 调试,还是让我们从 IEEE 的 JTAG 调试标准开始吧。
JTAG 是 JOINT TEST ACTION GROUP 的简称。IEEE 1149.1 标准就是由 JTAG 这个组织最初提出的,最终由 IEEE 批准并且标准化的。
所以,这个 IEEE 1149.1 这个标准一般也俗称 JTAG 调试标准。
接 下 来的这 一 部分, 主 要简单 的 介绍了 TAP (TEST ACCESS PORT) 和 BOUNDARY-SCAN ARCHITECTURE 的基本构架。
虽然不是很全面,但对了解 JTAG 的基本 原理来说,应该是差不离了。
如果希望更全面深入的了解 JTAG 的工作原理,可以参考 IEEE 1149.1 标准。
2-1 边界扫描
在 JTAG 调试当中,边界扫描(Boundary-Scan)是一个很重要的概念。
边界扫描技术的 基本思想是在靠近芯片的输入输出管脚上增加一个移位寄存器单元。
因为这些移位寄存器单 元都分布在芯片的边界上(周围),所以被称为边界扫描寄存器(Boundary-Scan Register Cell)。
当芯片处于调试状态的时候,这些边界扫描寄存器可以将芯片和外围的输入输出隔离开来。
通过这些边界扫描寄存器单元,可以实现对芯片输入输出信号的观察和控制。
对于芯片的输 入管脚,可以通过与之相连的边界扫描寄存器单元把信号(数据)加载倒该管脚中去;
对于 芯片的输出管脚,也可以通过与之相连的边界扫描寄存器“捕获”(CAPTURE)该管脚上的 输出信号。
在正常的运行状态下,这些边界扫描寄存器对芯片来说是透明的,所以正常的运 行不会受到任何影响。
这样,边界扫描寄存器提供了一个便捷的方式用以观测和控制所需要 调试的芯片。
另外,芯片输入输出管脚上的边界扫描(移位)寄存器单元可以相互连接起来, 在芯片的周围形成一个边界扫描链(Boundary-Scan Chain)。
一般的芯片都会提供几条独立的 边界扫描链,用来实现完整的测试功能。
边界扫描链可以串行的输入和输出,通过相应的时 钟信号和控制信号,就可以方便的观察和控制处在调试状态下的芯片。
利用边界扫描链可以实现对芯片的输入输出进行观察和控制。
下一个问题是:如何来管 理和使用这些边界扫描链?
对边界扫描链的控制主要是通过 TAP(Test Access Port)Controller 来完成的。
在下一个小节,我们一起来看看 TAP 是如何工作的。
2-2 TAP (TEST ACCESS PORT)
在上一节,我们已经简单介绍了边界扫描链,而且也了解了一般的芯片都会提供几条边 界扫描链,用来实现完整的测试功能。
下面,我将逐步介绍如何实现扫描链的控制和访问。
在 IEEE 1149.1 标准里面,寄存器被分为两大类:
数据寄存器(DR-Data Register)和指令 寄存器(IR-Instruction Register)。
边界扫描链属于数据寄存器中很重要的一种。
边界扫描链用 来实现对芯片的输入输出的观察和控制。而指令寄存器用来实现对数据寄存器的控制,
例如: 在芯片提供的所有边界扫描链中,选择一条指定的边界扫描链作为当前的目标扫描链,并作 为访问对象。
下面,让我们从 TAP(Test Access Port)开始。
TAP 是一个通用的端口,通过 TAP 可以访问芯片提供的所有数据寄存器(DR)和指令 寄存器(IR)。
对整个 TAP 的控制是通过 TAP Controller 来完成的。
TAP 总共包括 5 个信号接 口 TCK、TMS、TDI、TDO 和 TRST :
其中 4 个是输入信号接口和另外 1 个是输出信号接口。
一般,我们见到的开发板上都有一个 JTAG 接口,该 JTAG 接口的主要信号接口就是这 5 个。
下面,我先分别介绍这个 5 个接口信号及其作用。
Test Clock Input (TCK) TCK 为 TAP 的操作提供了一个独立的、基本的时钟信号,TAP 的所有操作都是通过 这个时钟信号来驱动的。
TCK 在 IEEE 1149.1 标准里是强制要求的。
Test Mode Selection Input (TMS) TMS 信号用来控制 TAP 状态机的转换。
通过 TMS 信号,可以控制 TAP 在不同的状 态间相互转换。TMS 信号在 TCK 的上升沿有效。
TMS 在 IEEE 1149.1 标准里是强制 要求的。
Test Data Input (TDI) TDI 是数据输入的接口。所有要输入到特定寄存器的数据都是通过 TDI 接口一位一位 串行输入的(由 TCK 驱动)。
TDI 在 IEEE 1149.1 标准里是强制要求的。
Test Data Output (TDO) TDO 是数据输出的接口。
所有要从特定的寄存器中输出的数据都是通过 TDO 接口一 位一位串行输出的(由 TCK 驱动)。
TDO 在 IEEE 1149.1 标准里是强制要求的。
Test Reset Input (TRST) TRST可以用来对TAP Controller进行复位(初始化)。
不过这个信号接口在IEEE 1149.1 标准里是可选的,并不是强制要求的。
因为通过 TMS 也可以对 TAP Controller 进行复 位(初始化)。
事实上,通过 TAP 接口,对数据寄存器(DR)进行访问的一般过程是:
通过指令寄存器(IR),选定一个需要访问的数据寄存器; 把选定的数据寄存器连接到 TDI 和 TDO 之间;
由 TCK 驱动,通过 TDI,把需要的数据输入到选定的数据寄存器当中去;
同时把选 定的数据寄存器中的数据通过 TDO 读出来。
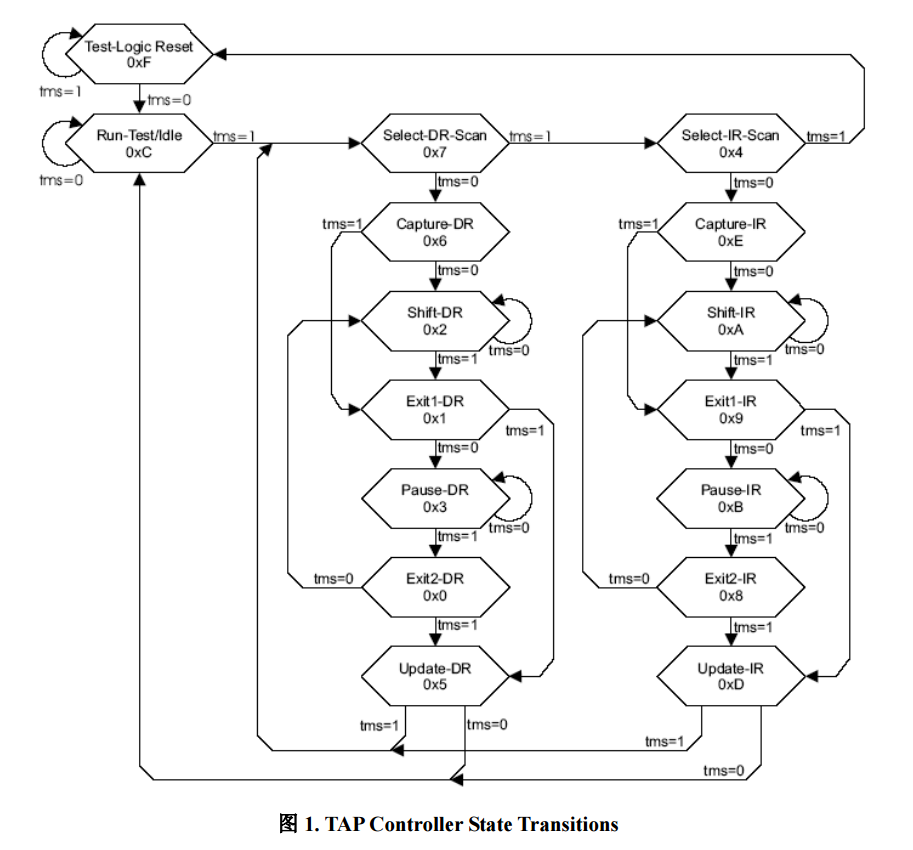
接下来,让我们一起来了解一下 TAP 的状态机。
TAP 的状态机如图 1 所示,总共有 16 个 状态。在图中,每个六边形表示一个状态,六边形中标有该状态的名称和标识代码。
图中的 箭头表示了 TAP Controller 内部所有可能的状态转换流程。
状态的转换是由 TMS 控制的,所 以在每个箭头上有标有 tms = 0 或者 tms = 1。
在 TCK 的驱动下,从当前状态到下一个状态 的转换是由 TMS 信号决定。
假设 TAP Controller 的当前状态为 Select-DR-Scan,在 TCK 的驱 动下,
如果 TMS = 0,TAP Controller 进入 Capture-DR 状态;
如果 TMS = 1,TAP Controller 进入 Select-IR-Scan 状态。
这个状态机看似很复杂,其实理解以后会发现这个状态机其实很直接、很简单。
观察图 1,我们可以发现,除了 Test-Logic Reset 和 Test-Run/Idle 状态外,其他的状态有些类似。
例 如 Select-DR-Scan 和 Select-IR-Scan 对应,Capture-DR 和 Capture-IR 对应,Shift-DR 和 Shift-IR 对应,等等。
在这些对应的状态中,DR 表示 Data Register,IR 表示 Instruction Register。
记 得我们前面说过吗,寄存器分为两大类,数据寄存器和指令寄存器。
其实标识有 DR 的这些 状态是用来访问数据寄存器的,而标识有 IR 的这些状态是用来访问指令寄存器的。
在详细描述整个状态机中的每一个状态之前,首先让我们来想一想:
要通过边界扫描链 来观察和控制芯片的输入和输出,需要做些什么?
如果需要捕获芯片某个管脚上的输出,首 先需要把该管脚上的输出装载到边界扫描链的寄存器单元里去,
然后通过 TDO 输出,这样我 们就可以从 TDO 上得到相应管脚上的输出信号。
如果要在芯片的某个管脚上加载一个特定的 信号,则首先需要通过 TDI 把期望的信号移位到与相应管脚相连的边界扫描链的寄存器单元 里去,
然后把该寄存器单元的值加载到相应的芯片管脚。
下面,让我们一起来看看每个状态 具体表示什么意思?完成什么功能?
Test-Logic Reset 系统上电后,TAP Controller 自动进入该状态。
在该状态下,测试部分的逻辑电路全部被禁用,以保证芯片核心逻辑电路的正常工作。
通过 TRST 信号也可以对测试逻辑电路进 行复位,使得 TAP Controller 进入 Test-Logic Reset 状态。
前面我们说过 TRST 是可选的 一个信号接口,这是因为在 TMS 上连续加 5 个 TCK 脉冲宽度的“1”信号
也可以对测试 逻辑电路进行复位,使得 TAP Controller 进入 Test-Logic Reset 状态。
所以,在不提供 TRST 信号的情况下,也不会产生影响。
在该状态下,如果 TMS 一直保持为“1”,TAP Controller 将保持在 Test-Logic Reset 状态下;
如果 TMS 由“1”变为“0”(在 TCK 的上升沿触发), 将使 TAP Controller 进入 Run-Test/Idle 状态。
Run-Test/Idle 这个是 TAP Controller 在不同操作间的一个中间状态。
这个状态下的动作取决于当前指令 寄存器中的指令。
有些指令会在该状态下执行一定的操作,而有些指令在该状态下不需 要执行任何操作。
在该状态下,如果 TMS 一直保持为“0”,TAP Controller 将一直保持 在 Run-Test/Idle 状态下;
如果 TMS 由“0”变为“1”(在 TCK 的上升沿触发),将使 TAP Controller 进入 Select-DR-Scan 状态。
Select-DR-Scan 这是一个临时的中间状态。
如果 TMS 为“0” (在 TCK 的上升沿触发),TAP Controller 进入 Capture-DR 状态,后续的系列动作都将以数据寄存器作为操作对象;
如果 TMS 为 “1” (在 TCK 的上升沿触发),TAP Controller 进入 Select-IR-Scan 状态。
Capture-DR 当 TAP Controller 在这个状态中,在 TCK 的上升沿,芯片输出管脚上的信号将被“捕获” 到与之对应的数据寄存器的各个单元中去。
如果 TMS 为“0”(在 TCK 的上升沿触发), TAP Controller 进入 Shift-DR 状态;
如果 TMS 为“1” (在 TCK 的上升沿触发),TAP Controller 进入 Exit1-DR 状态。
Shift-DR 在这个状态中,由 TCK 驱动,每一个时钟周期,被连接在 TDI 和 TDO 之间的数据寄存 器
将从 TDI 接收一位数据,同时通过 TDO 输出一位数据。
如果 TMS 为“0” (在 TCK 的上升沿触发),TAP Controller 保持在 Shift-DR 状态;
如果 TMS 为“1” (在 TCK 的 上升沿触发),TAP Controller 进入到 Exit1-DR 状态。
假设当前的数据寄存器的长度为 4。
如果 TMS 保持为 0,那在 4 个 TCK 时钟周期后,该数据寄存器中原来的 4 位数据(一 般是在 Capture-DR 状态中捕获的数据)将从 TDO 输出来;
同时该数据寄存器中的每个 寄存器单元中将分别获得从 TDI 输入的 4 位新数据。
Update-DR 在 Update-DR 状态下,由 TCK 上升沿驱动,数据寄存器当中的数据将被加载到相应的芯 片管脚上去,用以驱动芯片。
在该状态下,如果 TMS 为“0”,TAP Controller 将回到 Run-Test/Idle 状态;
如果 TMS 为“1”,TAP Controller 将进入 Select-DR-Scan 状态。
Select-IR-Scan 这是一个临时的中间状态。
如果 TMS 为“0” (在 TCK 的上升沿触发),TAP Controller 进入 Capture-IR 状态,后续的系列动作都将以指令寄存器作为操作对象;
如果 TMS 为 “1” (在 TCK 的上升沿触发),TAP Controller 进入 Test-Logic Reset 状态。
Capture-IR 当 TAP Controller 在这个状态中,在 TCK 的上升沿,一个特定的逻辑序列将被装载到指 令寄存器中去。
如果 TMS 为“0”(在 TCK 的上升沿触发),TAP Controller 进入 Shift-IR 状态;
如果 TMS 为“1” (在 TCK 的上升沿触发),TAP Controller 进入 Exit1-IR 状态。
Shift-IR 在这个状态中,由 TCK 驱动,每一个时钟周期,被连接在 TDI 和 TDO 之间的指令寄存器将
从 TDI 接收一位数据,同时通过 TDO 输出一位数据。
如果 TMS 为“0” (在 TCK 的上升沿触发),TAP Controller 保持在 Shift-IR 状态;
如果 TMS 为“1” (在 TCK 的 上升沿触发),TAP Controller 进入到 Exit1-IR 状态。
假设指令寄存器的长度为 4。如果 TMS 保持为 0,那在 4 个 TCK 时钟周期后,指令寄存器中原来的 4bit 长的特定逻辑序列
(在 Capture-IR 状态中捕获的特定逻辑序列)将从 TDO 输出来,该特定的逻辑序列可以 用来判断操作是否正确;
同时指令寄存器将获得从 TDI 输入的一个 4bit 长的新指令。
Update-IR 在这个状态中,在 Shift-IR 状态下输入的新指令将被用来更新指令寄存器。
说了那么多,下面,让我们先看看指令寄存器和数据寄存器访问的一般过程,以便建立一个 直观的概念。
1. 系统上电,TAP Controller 进入 Test-Logic Reset 状态,然后依次进入:
Run-Test/Idle Select-DR-Scan Select-IR-Scan Capture-IR Shift-IR Exit1-IR Update-IR, 最后回到 Run-Test/Idle 状态。
在 Capture-IR 状态中,一个特定的逻辑序列被加载到 指令寄存器当中;然后进入到 Shift-IR 状态。
在 Shift-IR 状态下,通过 TCK 的驱动, 可以将一条特定的指令送到指令寄存器当中去。
每条指令都将确定一条相关的数据 寄存器。
然后从 Shift-IR Exit1-IR Update-IR。在 Update-IR 状态,刚才输入到指 令寄存器中的指令将用来更新指令寄存器。
最后,进入到 Run-Test/Idle 状态,指令 生效,完成对指令寄存器的访问。
2. 当前可以访问的数据寄存器由指令寄存器中的当前指令决定。
要访问由刚才的指令 选定的数据寄存器,需要以 Run-Test/Idle 为起点,依次进入
Select-DR-Scan Capture-DR Shift-DR Exit1-DR Update-DR,最后回到 Run-Test/Idle 状态。
在 这个过程当中,被当前指令选定的数据寄存器会被连接在 TDI 和 TDO 之间。
通过 TDI 和 TDO,就可以将新的数据加载到数据寄存器当中去,同时,也可以捕获数据 寄存器中的数据。
具体过程如下。在 Capture-DR 状态中,由 TCK 的驱动,芯片管脚 上的输出信号会被“捕获”到相应的边界扫描寄存器单元中去。
这样,当前的数据 寄存器当中就记录了芯片相应管脚上的输出信号。
接下来从 Capture-DR 进入到 Shift-DR 状态中去。
在 Shift-DR 状态中,由 TCK 驱动,在每一个时钟周期内,一位 新的数据可以通过 TDI 串行输入到数据寄存器当中去,
同时,数据寄存器可以通过 TDO 串行输出一位先前捕获的数据。
在经过与数据寄存器长度相同的时钟周期后, 就可以完成新信号的输入和捕获数据的输出。
接下来通过 Exit1-DR 状态进入到 Update-DR 状态。
在 Update-DR 状态中,数据寄存器中的新数据被加载到与数据寄 存器的每个寄存器单元相连的芯片管脚上去。
最后,回到 Run-Test/Idle 状态,完成 对数据寄存器的访问。
上面描述的就是通过 TAP 对数据寄存器进行访问的一般流程。
会不会还是觉得很抽象?让我 们来看一个更直观的例子。
现在假设,TAP Controller 现在处在 Run-Test/Idle 状态,指令寄存 器当中已经成功的写入了一条新的指令,该指令选定的是一条长度为 6 的边界扫描链。
下面 让我们来看看实际如何来访问这条边界扫描链。
图 2 所示的是测试芯片及其被当前指令选定 的长度为 6 的边界扫描链。
由图 2 可以看出,当前选择的边界扫描链由 6 个边界扫描移位寄 存器单元组成,并且被连接在 TDI 和 TDO 之间。
TCK 时钟信号与每个边界扫描移位寄存器 单元相连。
每个时钟周期可以驱动边界扫描链的数据由 TDI 到 TDO 的方向移动一位,这样,
新的数据可以通过 TDI 输入一位,边界扫描链的数据可以通过 TDO 输出一位。
经过 6 个时钟 周期,就可以完全更新边界扫描链里的数据,而且可以将边界扫描链里捕获的 6 位数据通过TDO 全部移出来。

图 3 表示了边界扫描链的访问过程。
图 3.1 表示了芯片和边界扫描链的初始化状态,在测试 状态下,芯片的外部输入和输出被隔离开了,芯片的输入和输出可以通过相应的边界扫描链 来观察和控制。
在图 3.1 中,扫描链里的每个移位寄存器单元的数据是不确定的,所以在图 中用 X 表示,整个扫描链里的数据序列是 XXXXXX。
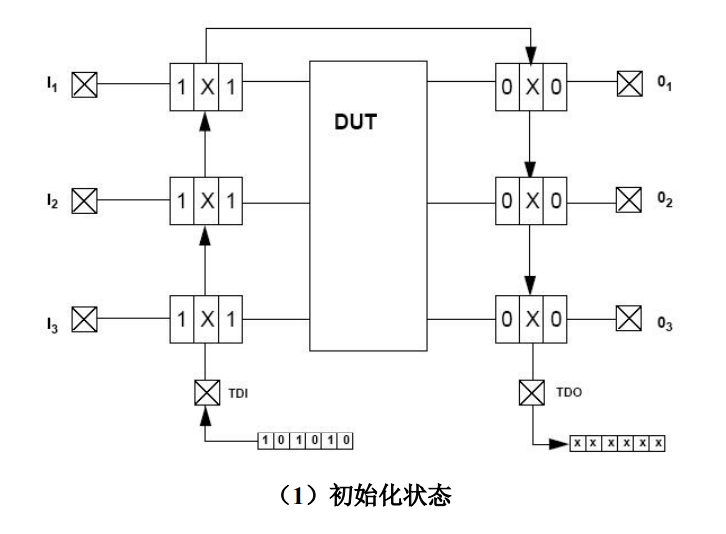
要从 TDI 输入到测试芯片上的数据序 列是:101010. 同时要从TDO得到芯片相应管脚上的状态。
现在TAP Controller从Run-Test/Idle 状态经过 Select-DR-Scan 状态进入到 Capture-DR 状态,
在 Capture-DR 状态当中,在一个 TCK 时钟的驱动下,芯片管脚上的信号状态全部被捕获到相应的边界扫描移位寄存器单元当中去,
如图 3.2 所示。从图 3.2 中我们可以看出,在进入 Capture-DR 状态后,
经过一个 TCK 时钟周 期,现在扫描链中的数据序列变成了:111000.
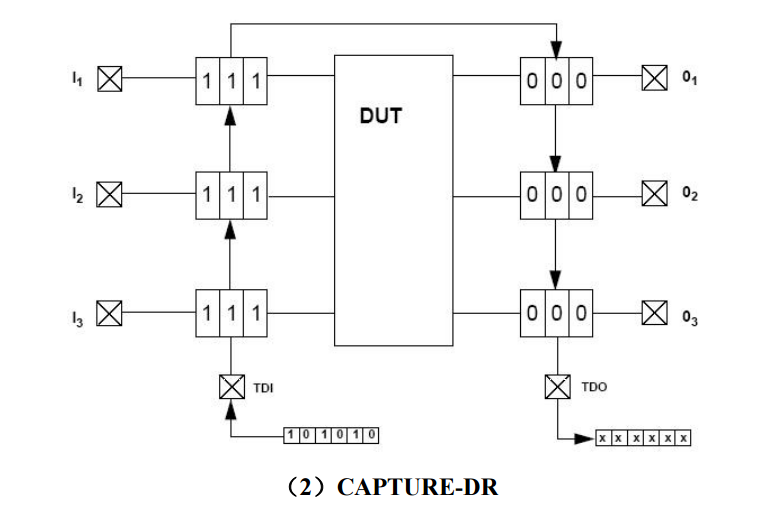
在数据捕获完成以后,从 Capture-DR 状态进 入到 Shift-DR 状态。
在 Shift-DR 状态中,我们将通过 6 个 TCK 时钟周期来把新的数据序列 (101010)通过 TDI 输入到边界扫描链当中去;
同时,将边界扫描链中捕获的数据序列 (111000)通过 TDO 输出来。
在进入到 Shift-DR 状态后,每经过一个 TCK 时钟驱动,边界 扫描链从 TDO 输出一位数据;同时,从 TDI 接收一位新的数据。
图 3.3 所示的是在 Shift-DR 状态下,1 个 TCK 时钟周期后的扫描链的变化。
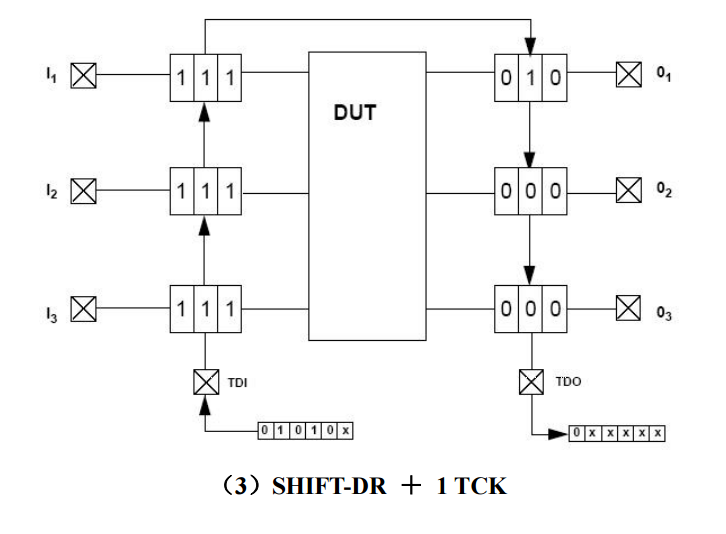
图 3.4 所示的是在 Shift-DR 状态下,2 个 TCK 时钟周期后的扫描链的变化。
此时,扫描链已经从 TDI 串行得到了两位新数据,从 TDO 也串 行输出了两位数据。
在 TCK 时钟的驱动下,这个过程一直继续下去。
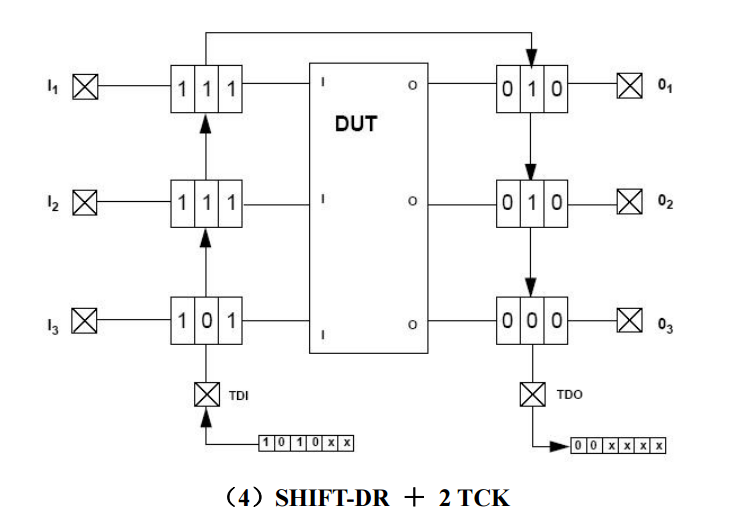
图 3.5 所示的是在经过 6 个 TCK 时钟周期以后扫描链的情况。
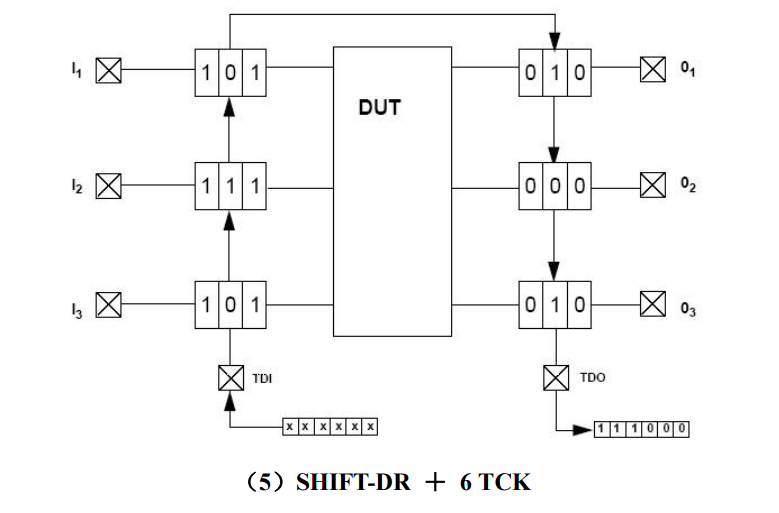
从图 3.5 中我们可以看到:边界扫描链当中已经包含 了新的数据序列:101010.
在 TDO 端,经过 6 个 TCK 时钟驱动以后,也接收到了在 Capture-DR 状态下捕获到的数据序列:111000.
到目前为止,虽然扫描链当中包含了新的数据序列: 101010,但测试芯片的管脚上的状态还是保持为:111000.
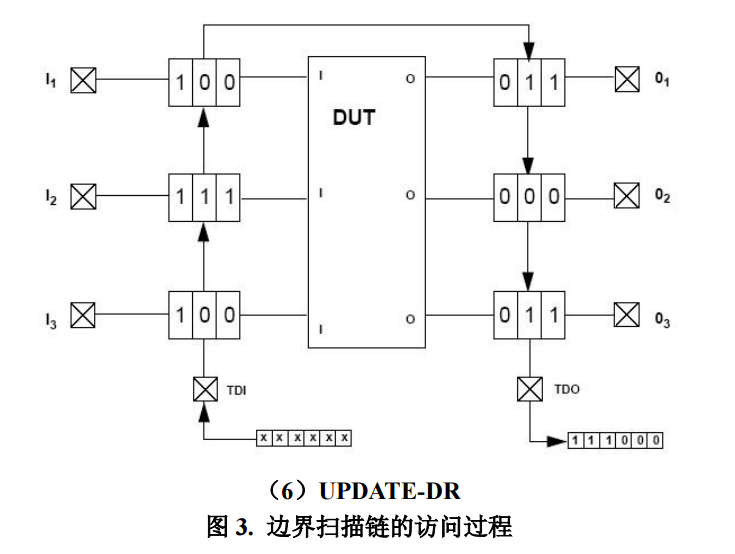
下一步,需要更新测试芯片相应管 脚上的信号状态。
要实现更新,TAP Controller 从 Shift-DR 状态,经过 Exit1-DR 状态,进入 到 Update-DR 状态。
在 Update-DR 状态中,经过一个周期的 TCK 时钟驱动,边界扫描链中的 新数据序列将被加载到测试芯片的相应管脚上去,如图 3.6 所示。
从图 3.6 可以看出,测试芯 片的状态已经被更新,相应管脚上的状态序列已经从 111000 变为 101010.
最后从 Update-DR 状态回到 Run-Test/Idle 状态,完成对选定的边界扫描链的访问。
在看完上面这个例子以后,对 TAP Controller 的状态机应该大概了解了吧?
对如何访问边界扫 描链应该也有个直观的概念了吧?
虽然上面的这个例子只是说明了如何访问边界扫描链,对 其它的数据寄存器、指令寄存器的访问过程也是类似的。
要实现对指令寄存器的访问,不同 的 是 TAP Controller 必须经过不同的状态序列:
Run-Test/Idle
Select-DR-Scan
Select-IR-Scan
Capture-IR
Shift-IR
Exit1-IR
Update-IR
Run-Test/Idle.
... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ...
TWENTYONE
Oct-2004