Description: This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once
debug工具
- rqt_console
- rqt_logger_level
rosrun rqt_console rqt_console #界面化的实时的日志监控
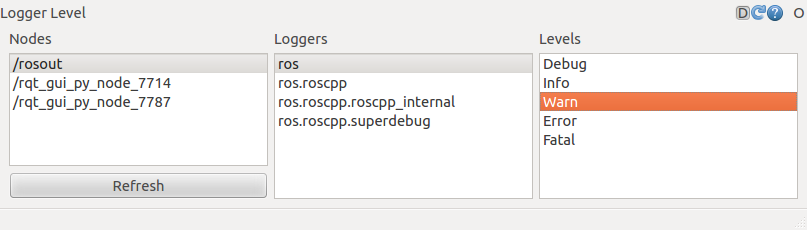
rosrun rqt_logger_level rqt_logger_level #界面化的用于设置日志级别
支持的日志级别
Fatal
Error
Warn
Info
Debug
roslaunch
echo $ROS_PACKAGE_PATH
<launch> --标明这是一个launch file
<group ns="turtlesim1"> --不同的namespace 允许有起2个同样name的node
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic"> --起一个mimic node.
<remap from="input" to="turtlesim1/turtle1"/> --This renaming will cause turtlesim2 to mimic turtlesim1
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
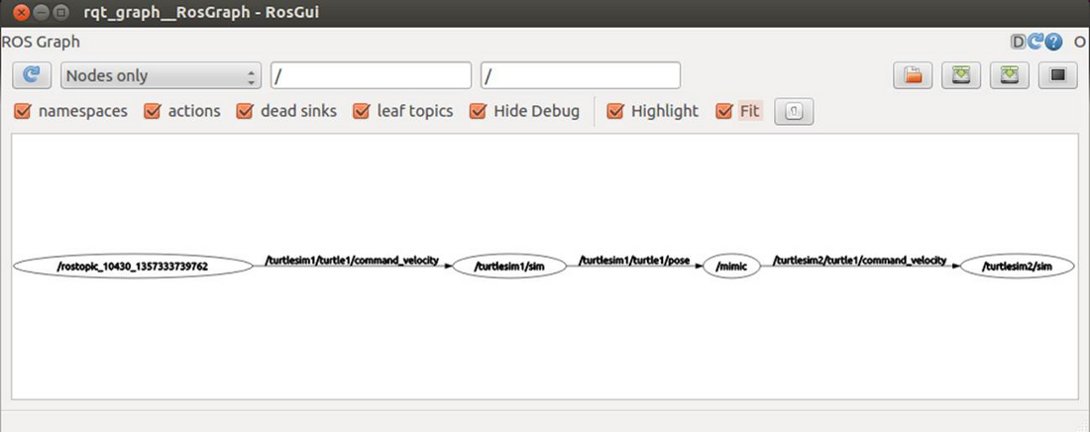
读取turtlemimic.launch文件启动node
roslaunch beginner_tutorials turtlemimic.launch
rqt或rqt_graph查看roslaunch实际做了什么