千辛万苦解决了libfreenect2的使用问题,终于来到了下一个坑……..iai-kinect2
主要要解决的问题是如下报错——
'Failed to load nodelet '/kinect2_points_xyzrgb_sd' of type 'depth_image_proc/point_cloud_xyzrgb' to manager 'kinect2'
'Failed to load nodelet '/kinect2_bridge' of type 'kinect2_bridge/kinect2_bridge_nodelet' to manager 'kinect2'
重新弄了一个catkin_ws工作区,跑了一遍安装,现在的情况是会重复开关,报错信息为
[DepthRegistrationOpenCL::init]could not find any suitable device
https://github.com/code-iai/iai_kinect2/issues/447
尽管我开了opencl重新编译了一遍libfreenect2,然而没有鬼用,而且试了一下/bin/Protonect cl,确实跑不起来
应该是需要安装opencl,但是按照libfreenect官方的来安装果然又失败了,只能自己找其他方法尝试了
目前的思路是在intel gpu上把opencl装起来,其实也可以采用禁用opencl的模式来运行iaikinect,但是感觉那样挺……low b?主要是我担心到时候运行速度会太慢
操作了半天没装上…….我寻思着给Intel的显卡整opencl估计又是一个大坑,在官网上找到了16.04-18.04的opencl安装包,但是没有14.04
果然还是算了吧,还是打算回头按照下面的方法改成用cpu驱动的形式
https://github.com/code-iai/iai_kinect2/issues/447
还是记录一下cpu和显卡配置
真的是老子就误打误撞的把opengl装上了呗
然后装opencl就继续头疼呗
https://github.com/code-iai/iai_kinect2/issues/447
按照这个里面的操作来
首先运行
rosrun kinect2_bridge kinect2_bridge _depth_method:=cpu _reg_method:=opengl
出现报错
[Kinect2Bridge::initRegistration] CPU registration is not available!
报错原因:

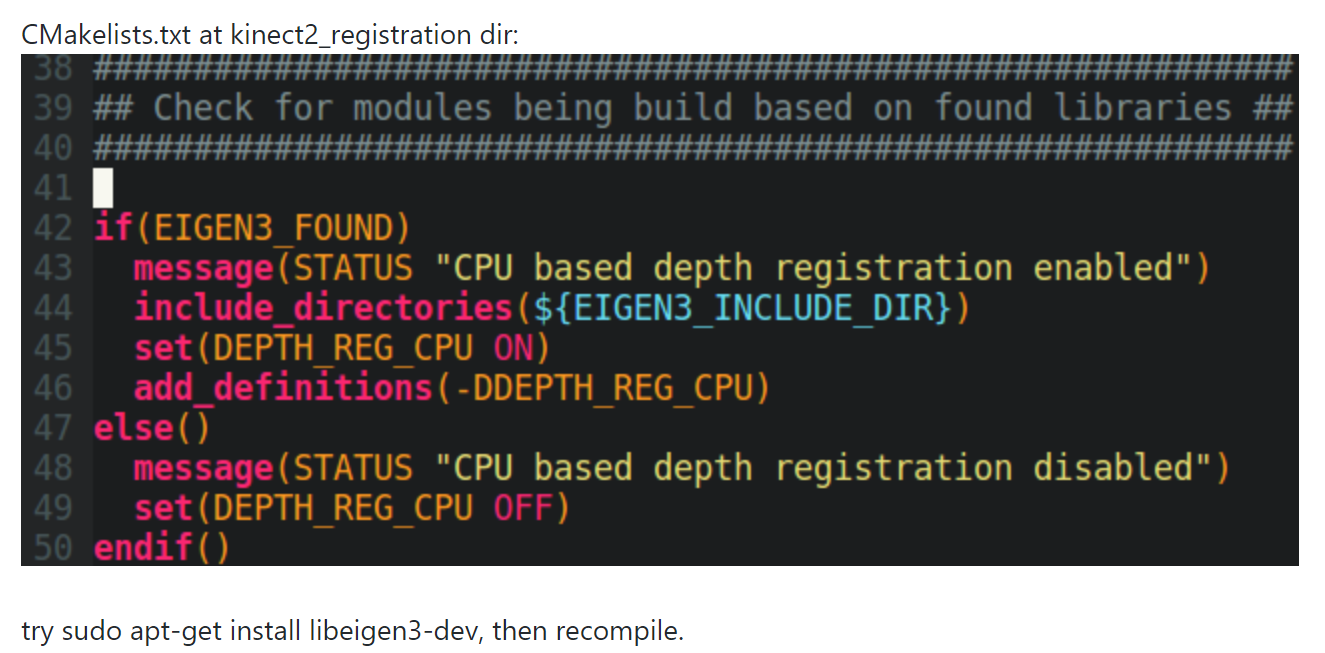
但是我之前在搭orbslam的环境时已经安装了libeigen3-dev了,不过useless,所以得想方法把eigen3给找到
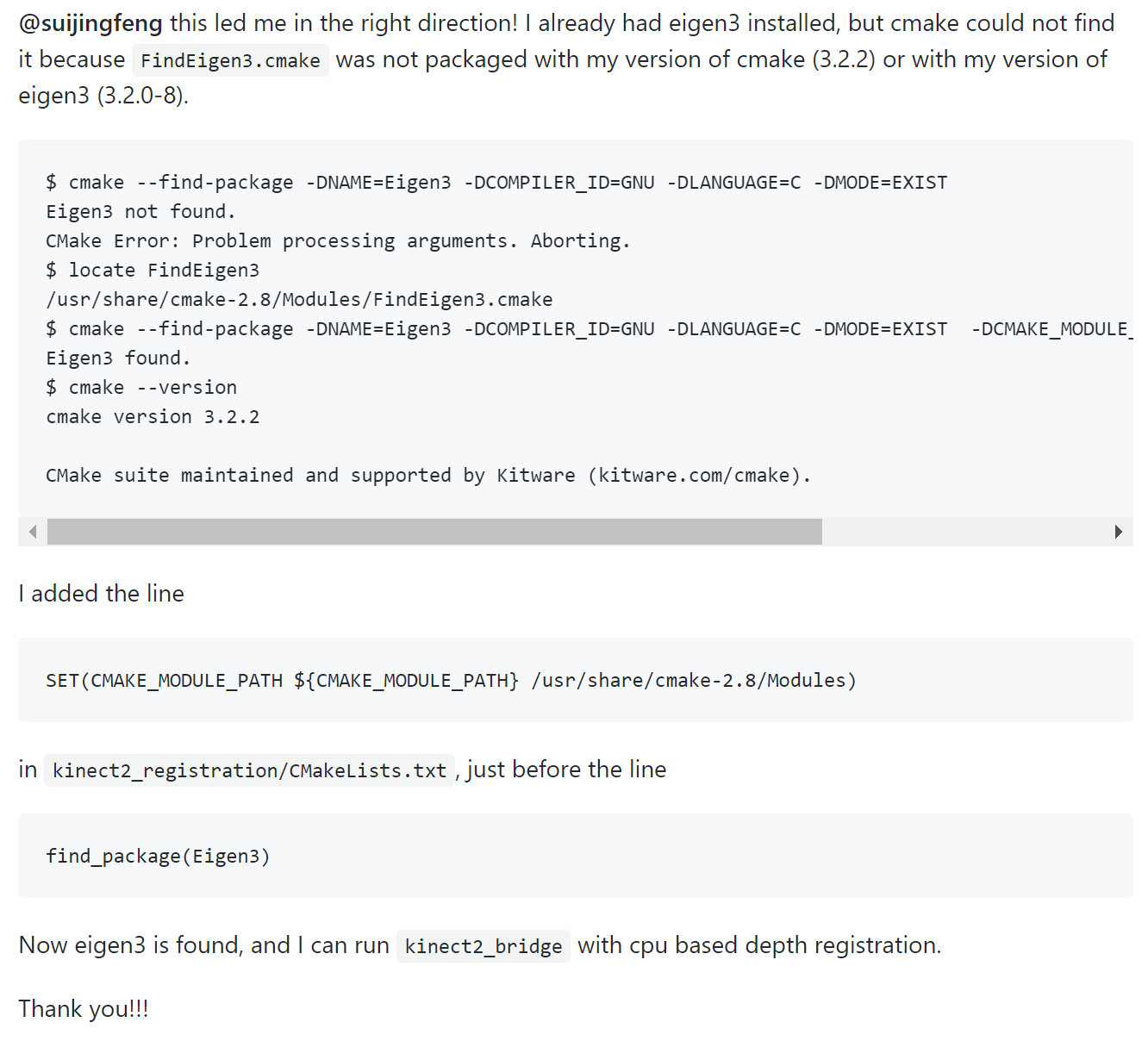
按照他的说法把这个在命令里面加上了,成功,耶
老子从国庆开始跑驱动,跑了整整半个月才跑完,虽然里面有两周加起来12天的时间在上课,但是满打满算也有7天左右在鼓捣这个了,真的是快搞死我了,我的妈呀
然后开始快乐的跑orb-slam2!!!!!
记录一下跑的方法:
终端1运行roscore
终端2运行rosrun kinect2_bridge kinect2_bridge _reg_method:=cpu _depth_method:=opengl
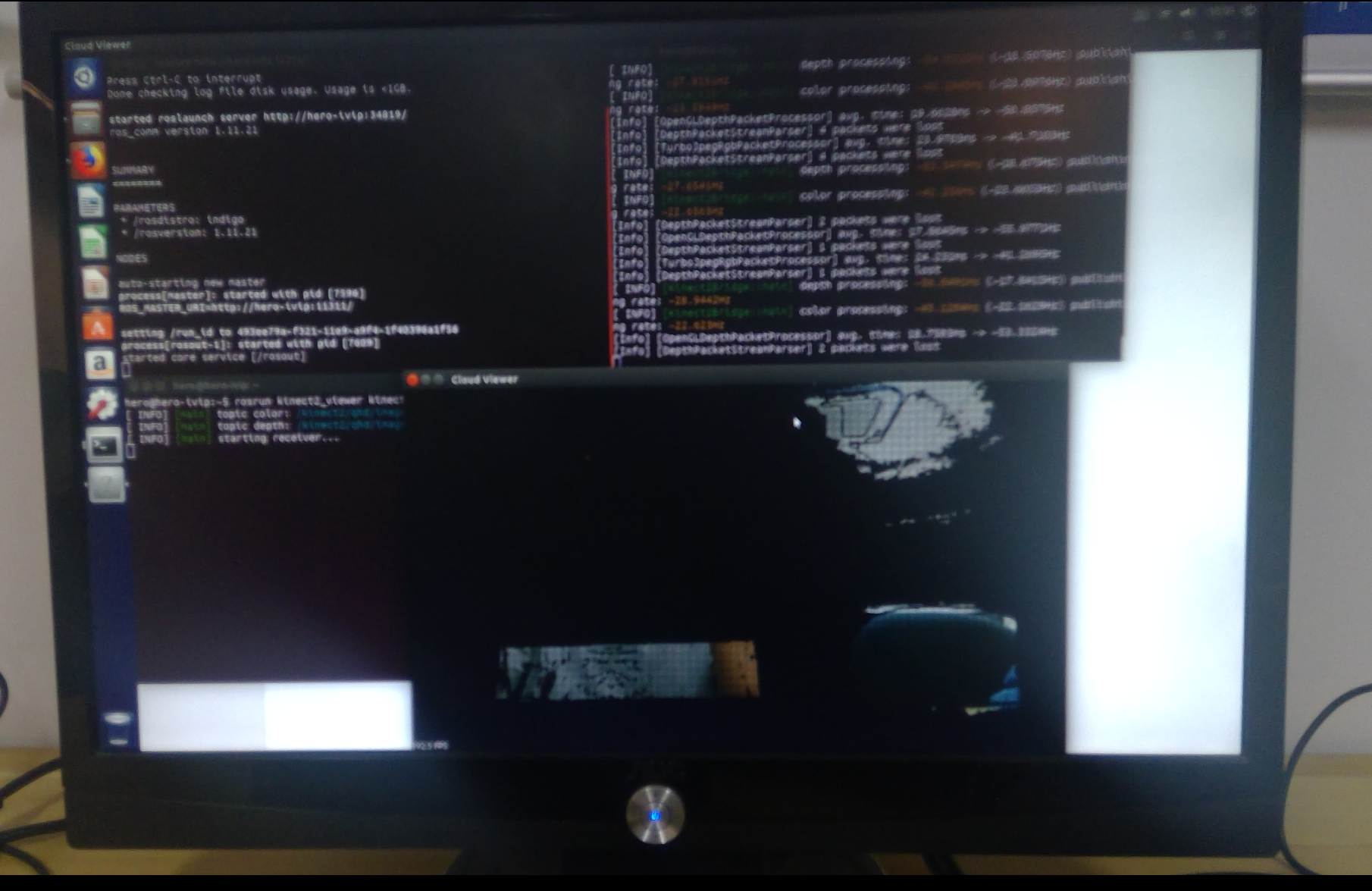
终端3运行rosrun kinect2_viewer kinect2_viewer
拍照留念