channel
前言
channel作为go中并发的一神器,深入研究下吧。
设计的原理
在早期,CPU都是以单核的形式顺序执⾏机器指令。Go语⾔的祖先C语⾔正是这种顺序编程语⾔的代 表。顺序编程语⾔中的顺序是指:所有的指
令都是以串⾏的⽅式执⾏,在相同的时刻有且仅有⼀个 CPU在顺序执⾏程序的指令。
随着处理器技术的发展,单核时代以提升处理器频率来提⾼运⾏效率的⽅式遇到了瓶颈,⽬前各种主 流的CPU频率基本被锁定在了3GHZ附近。单核CPU的
发展的停滞,给多核CPU的发展带来了机遇。 相应地,编程语⾔也开始逐步向并⾏化的⽅向发展。Go语⾔正是在多核和⽹络化的时代背景下诞⽣的 原⽣
⽀持并发的编程语⾔。
常⻅的并⾏编程有多种模型,主要有多线程、消息传递等。从理论上来看,多线程和基于消息的并发 编程是等价的。由于多线程并发模型可以⾃然对应
到多核的处理器,主流的操作系统因此也都提供了系统级的多线程⽀持,同时从概念上讲多线程似乎也更直观,因此多线程编程模型逐步被吸纳到主流
的编程语⾔特性或语⾔扩展库中。⽽主流编程语⾔对基于消息的并发编程模型⽀持则相⽐较少,Erlang语⾔是⽀持基于消息传递并发编程模型的代表者,
它的并发体之间不共享内存。Go语⾔是基于 消息并发模型的集⼤成者,它将基于CSP模型的并发编程内置到了语⾔中,通过⼀个go关键字就可以 轻易地
启动⼀个Goroutine,与Erlang不同的是Go语⾔的Goroutine之间是共享内存的。
共享内存
多线程共享内存。其实就是Java或者C++等语言中的多线程开发。单个的goutine代码是顺序执行,而并发编程时,创建多个goroutine,但我们并
不能确定不同的goroutine之间的执行顺序,多个goroutine之间大部分情况是代码交叉执行,在执行过程中,可能会修改或读取共享内存变量,这样
就会产生数据竞争,但是我们可以用锁去消除数据的竞争。
当然这种在go中是不推荐的
csp
Go语⾔最吸引⼈的地⽅是它内建的并发⽀持。Go语⾔并发体系的理论是C.A.R Hoare在1978年提出的 CSP(Communicating Sequential Process,
通讯顺序进程)。CSP有着精确的数学模型,并实际应 ⽤在了Hoare参与设计的T9000通⽤计算机上。从NewSqueak、Alef、Limbo到现在的Go语⾔,对于
对 CSP有着20多年实战经验的Rob Pike来说,他更关注的是将CSP应⽤在通⽤编程语⾔上产⽣的潜⼒。 作为Go并发编程核⼼的CSP理论的核⼼概念只有
⼀个:同步通信。
⾸先要明确⼀个概念:并发不是并⾏。并发更关注的是程序的设计层⾯,并发的程序完全是可以顺序 执⾏的,只有在真正的多核CPU上才可能真正地同时运⾏。
并⾏更关注的是程序的运⾏层⾯,并⾏⼀ 般是简单的⼤量重复,例如GPU中对图像处理都会有⼤量的并⾏运算。为更好的编写并发程序,从设 计之初Go语⾔
就注重如何在编程语⾔层级上设计⼀个简洁安全⾼效的抽象模型,让程序员专注于分解 问题和组合⽅案,⽽且不⽤被线程管理和信号互斥这些繁琐的操作分
散精⼒。
在并发编程中,对共享资源的正确访问需要精确的控制,在⽬前的绝⼤多数语⾔中,都是通过加锁等线程同步⽅案来解决这⼀困难问题,⽽Go语⾔却另辟蹊
径,它将共享的值通过Channel传递(实际上多 个独⽴执⾏的线程很少主动共享资源)。在任意给定的时刻,最好只有⼀个Goroutine能够拥有该资源。数
据竞争从设计层⾯上就被杜绝了。为了提倡这种思考⽅式,Go语⾔将其并发编程哲学化为⼀句⼝号:
Do not communicate by sharing memory; instead, share memory by communicating.
不要通过共享内存来通信,⽽应通过通信来共享内存。
这是更⾼层次的并发编程哲学(通过管道来传值是Go语⾔推荐的做法)。虽然像引⽤计数这类简单的并 发问题通过原⼦操作或互斥锁就能很好地实现,但是通
过Channel来控制访问能够让你写出更简洁正确的程序。
channel
Golang中使用 CSP中 channel 这个概念。channel 是被单独创建并且可以在进程之间传递,它的通信模式类似于 boss-worker 模式的,一个实体通
过将消息发送到channel 中,然后又监听这个 channel 的实体处理,两个实体之间是匿名的,这个就实现实体中间的解耦,其中 channel 是同步的一
个消息被发送到 channel 中,最终是一定要被另外的实体消费掉的。
channel的定义
channel 是一个引用类型,所以在它被初始化之前,它的值是 nil,channel 使用 make 函数进行初始化。go中内置的类型,初始化的时候,我们需要初始化
channel的长度。
指定了长度代表有缓冲
ch := make(chan int, 1)
未指定就是无缓冲
ch := make(chan int)
有缓冲和无缓冲的差别是什么呢?
对不带缓冲的 channel 进行的操作实际上可以看作“同步模式”,带缓冲的则称为“异步模式”。
同步模式下,发送方和接收方要同步就绪,只有在两者都 ready 的情况下,数据才能在两者间传输(后面会看到,实际上就是内存拷贝)。否则,任意一方
先行进行发送或接收操作,都会被挂起,等待另一方的出现才能被唤醒。
异步模式下,在缓冲槽可用的情况下(有剩余容量),发送和接收操作都可以顺利进行。否则,操作的一方(如写入)同样会被挂起,直到出现相反操作
(如接收)才会被唤醒。
举个栗子:
无缓冲的 就是一个送信人去你家门口送信 ,你不在家 他不走,你一定要接下信,他才会走。
无缓冲保证信能到你手上
有缓冲的 就是一个送信人去你家仍到你家的信箱 转身就走 ,除非你的信箱满了 他必须等信箱空下来。
有缓冲的 保证 信能进你家的邮箱
源码剖析
type hchan struct {
qcount uint // buffer 中已放入的元素个数
dataqsiz uint // 用户构造 channel 时指定的 buf 大小,也就是底层循环数组的长度
buf unsafe.Pointer // 指向底层循环数组的指针 只针对有缓冲的 channel
elemsize uint16 // buffer 中每个元素的大小
closed uint32 // channel 是否关闭,== 0 代表未 closed
elemtype *_type // channel 元素的类型信息
sendx uint // 已发送元素在循环数组中的索引
recvx uint // 已接收元素在循环数组中的索引
recvq waitq // 等待接收的 goroutine list of recv waiters
sendq waitq // 等待发送的 goroutine list of send waiters
lock mutex // 保护 hchan 中所有字段
}
简单分析下:
buf指向底层的循环数组,只有缓冲类型的channel才有。
sendx,recvx 均指向底层循环数组,表示当前可以发送和接收的元素位置索引值(相对于底层数组)。
sendq,recvq 分别表示被阻塞的 goroutine,这些 goroutine 由于尝试读取 channel 或向 channel 发送数据而被阻塞。读的时候,如果循环
数据为空,那么当前读的goroutine就会加入到recvq,等待有消息写入结束阻塞。同理写入的goroutine,一样,如果队列满了,就加入到sendq,阻塞直到
消息写入。
waitq 相关的属性,可以理解为是一个 FIFO 的标准队列。其中 recvq 中是正在等待接收数据的 goroutine,sendq 中是等待发送数据的 goroutine。
waitq 使用双向链表实现。
recvq和sendq,它们是 waitq 结构体,而waitq实际上就是一个双向链表,链表的元素是sudog,里面包含 g 字段,g 表示一个 goroutine,所以 sudog 可以看成一个 goroutine。但是两个还是有区别的。
lock通过互斥锁保证数据安全。
设计思路:
对于无缓冲的是没有buf,有缓冲的buf是有buf的,长度也就是创建channel制定的长度。
有缓冲channel的buf是循环使用的,已经读取过的,会被后面新写入的消息覆盖,通过sendx,recvx这两个指向底层数据的指针的滑动,实现对buf的复用。
具体的消息写入读读取,以及goroutine的阻塞,请看下面
环形队列
chan内部实现了一个环形队列作为其缓冲区,队列的长度是创建chan时指定的。
看下实现的图片:
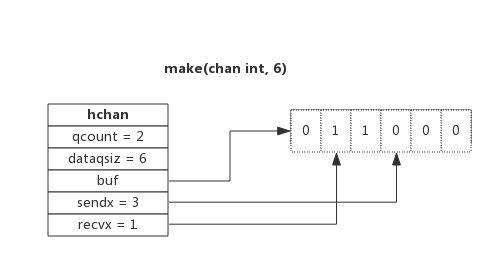
- dataqsiz指示了队列长度为6,即可缓存6个元素;
- buf指向队列的内存,队列中还剩余两个元素;
- qcount表示队列中还有两个元素,也就是[1,3};
- sendx指示后续写入的数据存储的位置,取值[0, 6);
- recvx指示从该位置读取数据, 取值[0, 6);
创建
func makechan(t *chantype, size int) *hchan {
elem := t.elem
// 做的一些检查
if elem.size >= 1<<16 {
throw("makechan: invalid channel element type")
}
if hchanSize%maxAlign != 0 || elem.align > maxAlign {
throw("makechan: bad alignment")
}
mem, overflow := math.MulUintptr(elem.size, uintptr(size))
if overflow || mem > maxAlloc-hchanSize || size < 0 {
panic(plainError("makechan: size out of range"))
}
// Hchan does not contain pointers interesting for GC when elements stored in buf do not contain pointers.
// buf points into the same allocation, elemtype is persistent.
// SudoG's are referenced from their owning thread so they can't be collected.
// TODO(dvyukov,rlh): Rethink when collector can move allocated objects.
var c *hchan
switch {
case mem == 0:
// 队列或元素大小为零
// 当前 Channel 中不存在缓冲区,为 runtime.hchan 分配一段内存空间
c = (*hchan)(mallocgc(hchanSize, nil, true))
c.buf = c.raceaddr()
case elem.ptrdata == 0:
// 类型不是指针
// 一次性给channel和buf(也就是底层数组)分类一块连续的空间
c = (*hchan)(mallocgc(hchanSize+mem, nil, true))
c.buf = add(unsafe.Pointer(c), hchanSize)
default:
// 默认情况下会单独为 runtime.hchan 和缓冲区分配内存
c = new(hchan)
c.buf = mallocgc(mem, elem, true)
}
// 最后更新几个字段的值
c.elemsize = uint16(elem.size)
c.elemtype = elem
c.dataqsiz = uint(size)
if debugChan {
print("makechan: chan=", c, "; elemsize=", elem.size, "; elemalg=", elem.alg, "; dataqsiz=", size, "
")
}
return c
}
写入数据
向一个channel写入数据的流程
1、首先判断recvq等待接收队列是否为空,不为空说明缓冲区中没有内容或者是一个无缓冲channel。直接从recvq中取出一个goroutine,然后写入数据,接着唤醒
goroutine,最后结束发发送过程。
2、如果缓冲区有空余的位置,写入数据到缓冲区,完成发送。
3、如果缓冲区满了,那么就把写入数据的goroutine放到sendq中,进入睡眠,最后等待goroutine被唤醒。
func chansend(c *hchan, ep unsafe.Pointer, block bool, callerpc uintptr) bool {
// 如果 channel 是 nil
if c == nil {
if !block {
return false
}
gopark(nil, nil, waitReasonChanSendNilChan, traceEvGoStop, 2)
throw("unreachable")
}
if debugChan {
print("chansend: chan=", c, "
")
}
if raceenabled {
racereadpc(c.raceaddr(), callerpc, funcPC(chansend))
}
// 对于不阻塞的 send,快速检测失败场景
//
// 如果 channel 未关闭且 channel 没有多余的缓冲空间。这可能是:
// 1. channel 是非缓冲型的,且等待接收队列里没有 goroutine
// 2. channel 是缓冲型的,但循环数组已经装满了元素
if !block && c.closed == 0 && ((c.dataqsiz == 0 && c.recvq.first == nil) ||
(c.dataqsiz > 0 && c.qcount == c.dataqsiz)) {
return false
}
var t0 int64
if blockprofilerate > 0 {
t0 = cputicks()
}
// 加锁
lock(&c.lock)
// 如果channel关闭了
if c.closed != 0 {
unlock(&c.lock)
panic(plainError("send on closed channel"))
}
// 如果接收队列里有 goroutine,直接将要发送的数据拷贝到接收 goroutine
if sg := c.recvq.dequeue(); sg != nil {
// Found a waiting receiver. We pass the value we want to send
// directly to the receiver, bypassing the channel buffer (if any).
send(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true
}
// 缓冲型的channel,buffer 中已放入的元素个数小于循环数组的长度
if c.qcount < c.dataqsiz {
// qp 指向 buf 的 sendx 位置
qp := chanbuf(c, c.sendx)
if raceenabled {
raceacquire(qp)
racerelease(qp)
}
// 将数据从 ep 处拷贝到 qp
typedmemmove(c.elemtype, qp, ep)
// 发送的游标加1
c.sendx++
// 如果发送的游标值等于容量值,游标值归0
if c.sendx == c.dataqsiz {
c.sendx = 0
}
// 缓冲区的数量加1
c.qcount++
// 解锁
unlock(&c.lock)
return true
}
// buff空间已经满了
// 如果不需要阻塞,则直接返回错误
if !block {
unlock(&c.lock)
return false
}
// 否则,阻塞该 goroutine.
// Block on the channel. Some receiver will complete our operation for us.
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
// No stack splits between assigning elem and enqueuing mysg
// on gp.waiting where copystack can find it.
mysg.elem = ep
mysg.waitlink = nil
mysg.g = gp
mysg.isSelect = false
mysg.c = c
gp.waiting = mysg
gp.param = nil
// 将该 goroutine 的结构放入 sendq 队列
c.sendq.enqueue(mysg)
// 休眠
// 等待 goready 唤醒
goparkunlock(&c.lock, waitReasonChanSend, traceEvGoBlockSend, 3)
// Ensure the value being sent is kept alive until the
// receiver copies it out. The sudog has a pointer to the
// stack object, but sudogs aren't considered as roots of the
// stack tracer.
KeepAlive(ep)
// someone woke us up.
if mysg != gp.waiting {
throw("G waiting list is corrupted")
}
gp.waiting = nil
if gp.param == nil {
if c.closed == 0 {
throw("chansend: spurious wakeup")
}
panic(plainError("send on closed channel"))
}
gp.param = nil
if mysg.releasetime > 0 {
blockevent(mysg.releasetime-t0, 2)
}
mysg.c = nil
releaseSudog(mysg)
return true
}
简单的流程图如下:

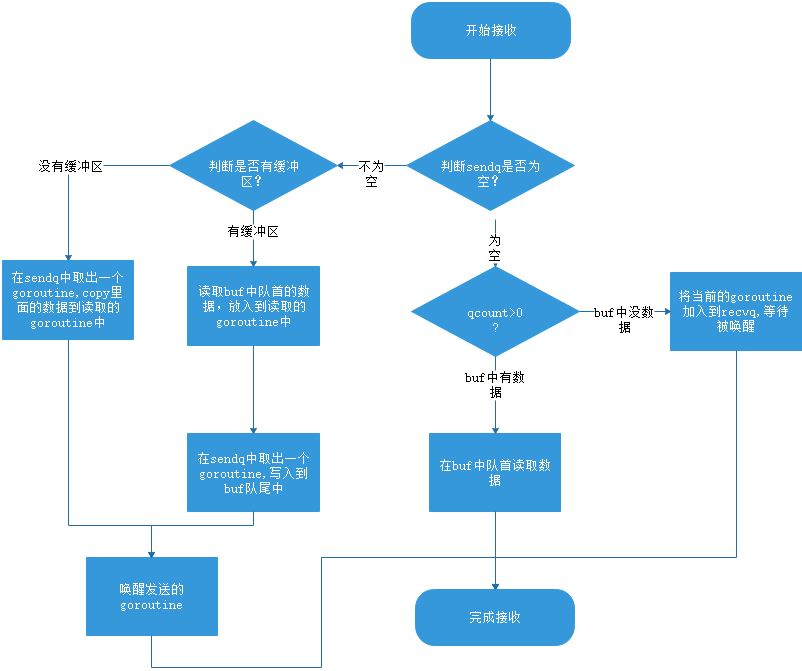
读取数据
从一个channel读取数据的流程如下:
1、如果等待发送的goroutine list,也就是sendq不为空。并且没有缓存区。直接从sendq中取出一个goroutine,读出当前goroutine中的消息,唤醒goroutine,
结束读取的过程。
2、如果等待发送的goroutine list,也就是sendq不为空。说明缓冲区已经满了,移动recvx指针的位置,取出一个数据。同时在sendq中取出一个goroutine,
读取里面的数据到buf中,结束当前读取。
3、如果等待发送的goroutine list,也就是sendq为空。并且缓冲区,有数据。直接在缓冲区取出数据,完成本次读取。
4、如果等待发送的goroutine list,也就是sendq为空。并且缓冲区,没有数据。将当前goroutine加入recvq,进入睡眠,等待被写goroutine唤醒。
// chanrecv在通道c上接收并将接收到的数据写入ep。
// 如果 ep 是 nil,说明忽略了接收值。
// 如果 block == false,即非阻塞型接收,在没有数据可接收的情况下,返回 (false, false)
// 否则,如果 c 处于关闭状态,将 ep 指向的地址清零,返回 (true, false)
// 否则,用返回值填充 ep 指向的内存地址。返回 (true, true)
// 如果 ep 非空,则应该指向堆或者函数调用者的栈
func chanrecv(c *hchan, ep unsafe.Pointer, block bool) (selected, received bool) {
if debugChan {
print("chanrecv: chan=", c, "
")
}
// 如果channel为nil
if c == nil {
// block == false,即非阻塞型接收,在没有数据可接收的情况下,返回 (false, false)
if !block {
return
}
// 接收一个 nil 的 channel,goroutine 挂起
gopark(nil, nil, waitReasonChanReceiveNilChan, traceEvGoStop, 2)
throw("unreachable")
}
// 在非阻塞模式下,快速检测到失败,不用获取锁,快速返回
// 当我们观察到 channel 没准备好接收:
// 1. 非缓冲型,等待发送列队 sendq 里没有 goroutine 在等待
// 2. 缓冲型,但 buf 里没有元素
// 之后,又观察到 closed == 0,即 channel 未关闭。
// 因为 channel 不可能被重复打开,所以前一个观测的时候 channel 也是未关闭的,
// 因此在这种情况下可以直接宣布接收失败,返回 (false, false)
if !block && (c.dataqsiz == 0 && c.sendq.first == nil ||
c.dataqsiz > 0 && atomic.Loaduint(&c.qcount) == 0) &&
atomic.Load(&c.closed) == 0 {
return
}
var t0 int64
if blockprofilerate > 0 {
t0 = cputicks()
}
// 加锁
lock(&c.lock)
// channel 已关闭,并且循环数组 buf 里没有元素
// 这里可以处理非缓冲型关闭 和 缓冲型关闭但 buf 无元素的情况
// 也就是说即使是关闭状态,但在缓冲型的 channel,
// buf 里有元素的情况下还能接收到元素
if c.closed != 0 && c.qcount == 0 {
if raceenabled {
raceacquire(c.raceaddr())
}
// 解锁
unlock(&c.lock)
if ep != nil {
// 从一个已关闭的 channel 执行接收操作,且未忽略返回值
// 那么接收的值将是一个该类型的零值
// typedmemclr 根据类型清理相应地址的内存
typedmemclr(c.elemtype, ep)
}
// 从一个已关闭的 channel 接收,selected 会返回true
return true, false
}
if sg := c.sendq.dequeue(); sg != nil {
// 发现一个等待的发送者。如果缓冲区大小为0,则接收值
// 直接来自发件人。否则,从队列头接收
// 并将发送方的值添加到队列的尾部(两者都映射到相同的缓冲区槽,因为队列已满)。
recv(c, sg, ep, func() { unlock(&c.lock) }, 3)
return true, true
}
// 缓冲类型
if c.qcount > 0 {
// 直接从循环数组里找到要接收的元素
qp := chanbuf(c, c.recvx)
if raceenabled {
raceacquire(qp)
racerelease(qp)
}
// 代码里,没有忽略要接收的值,不是 "<- ch",而是 "val <- ch",ep 指向 val
if ep != nil {
typedmemmove(c.elemtype, ep, qp)
}
// 清除掉循环数组里相应位置的值
typedmemclr(c.elemtype, qp)
// 接收游标向前移动
c.recvx++
// 达到数据的长度,下标重新计算
if c.recvx == c.dataqsiz {
c.recvx = 0
}
// buf 数组里的元素个数减 1
c.qcount--
// 解锁
unlock(&c.lock)
return true, true
}
// 非阻塞接收,解锁。selected 返回 false,因为没有接收到值
if !block {
unlock(&c.lock)
return false, false
}
// 阻塞
// 构建recvq的阻塞队列
gp := getg()
mysg := acquireSudog()
mysg.releasetime = 0
if t0 != 0 {
mysg.releasetime = -1
}
mysg.elem = ep
mysg.waitlink = nil
gp.waiting = mysg
mysg.g = gp
mysg.isSelect = false
mysg.c = c
gp.param = nil
c.recvq.enqueue(mysg)
// 将当前 goroutine 挂起
goparkunlock(&c.lock, waitReasonChanReceive, traceEvGoBlockRecv, 3)
// someone woke us up
if mysg != gp.waiting {
throw("G waiting list is corrupted")
}
gp.waiting = nil
if mysg.releasetime > 0 {
blockevent(mysg.releasetime-t0, 2)
}
closed := gp.param == nil
gp.param = nil
mysg.c = nil
releaseSudog(mysg)
return true, !closed
}
梳理下流程图:
channel的关闭
chanbel的关闭,对于其中的recvq和sendq也就是阻塞的发送者和接收者,对于等待接收者而言,会收到一个相应类型的零值。对于等待发送者,会直接 panic。
channel的关闭不当会出现panic的场景:
1、关闭值为nil的channel
2、关闭已经关闭的channel
3、向已经关闭的channel写入数据
func closechan(c *hchan) {
// 关闭值为nil的channel,报错panic
if c == nil {
panic(plainError("close of nil channel"))
}
// 加锁
lock(&c.lock)
// 关闭已经关闭的channel,报错panic
if c.closed != 0 {
unlock(&c.lock)
panic(plainError("close of closed channel"))
}
if raceenabled {
callerpc := getcallerpc()
racewritepc(c.raceaddr(), callerpc, funcPC(closechan))
racerelease(c.raceaddr())
}
// 修改关闭饿状态
c.closed = 1
var glist gList
// 释放recvq中的sudog
for {
// 接收一个sudog
sg := c.recvq.dequeue()
// 全部接收完毕了
if sg == nil {
break
}
// 如果 elem 不为空,说明此 receiver 未忽略接收数据
// 给它赋一个相应类型的零值
if sg.elem != nil {
typedmemclr(c.elemtype, sg.elem)
sg.elem = nil
}
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
// 取出goroutine
gp := sg.g
gp.param = nil
if raceenabled {
raceacquireg(gp, c.raceaddr())
}
glist.push(gp)
}
// 将 channel 等待发送队列里的 sudog 释放
// 如果存在,这些 goroutine 将会 panic
for {
// 取出
sg := c.sendq.dequeue()
if sg == nil {
break
}
// 发送者会 panic
sg.elem = nil
if sg.releasetime != 0 {
sg.releasetime = cputicks()
}
gp := sg.g
gp.param = nil
if raceenabled {
raceacquireg(gp, c.raceaddr())
}
glist.push(gp)
}
unlock(&c.lock)
// Ready all Gs now that we've dropped the channel lock.
for !glist.empty() {
// 取出一个
gp := glist.pop()
gp.schedlink = 0
// 唤醒相应 goroutine
goready(gp, 3)
}
}
优雅的关闭
对于channel的关闭,我们需要注意下:
1、在不能更改channel状态的情况下,没有简单普遍的方式来检查channel是否已经关闭了
2、关闭已经关闭的channel会导致panic,所以在closer(关闭者)不知道channel是否已经关闭的情况下去关闭channel是很危险的
3、发送值到已经关闭的channel会导致panic,所以如果sender(发送者)在不知道channel是否已经关闭的情况下去向channel发送值是很危险的
对于channel的关闭有这样的一个原则:
don't close a channel from the receiver side and don't close a channel if the channel has multiple concurrent senders.
不要从一个receiver侧关闭channel,也不要在有多个sender时,关闭channel。
向已经关闭的channel发送数据会导致panic,所以在receiver侧关闭,sender是不知道channel是否关闭的,多个sender的情况下,某一个sender关闭了channel,
其他的sender是不知道这个channel是否关闭的,再次写入数据和关闭,都会导致panic。
M个receivers,一个sender
这个是最简单的场景,当需要关闭的时候sender直接关闭就好了
package main
import (
"log"
"math/rand"
"sync"
"time"
)
func main() {
rand.Seed(time.Now().UnixNano())
log.SetFlags(0)
// ...
const MaxRandomNumber = 100000
const NumReceivers = 100
// 使用WaitGroup来阻塞查看打印的效果
wgReceivers := sync.WaitGroup{}
wgReceivers.Add(NumReceivers)
// 设置channel的长度为10
dataCh := make(chan int, 100)
// the sender
go func() {
for {
if value := rand.Intn(MaxRandomNumber); value == 0 {
// 需要关闭的时候直接关闭就好了,是很安全的
close(dataCh)
return
} else {
dataCh <- value
}
}
}()
// receivers
for i := 0; i < NumReceivers; i++ {
go func() {
defer wgReceivers.Done()
// 监听dataCh,接收里面的值
for value := range dataCh {
log.Println(value)
}
}()
}
wgReceivers.Wait()
}
一个receiver,N个sender
这种情况下可以给个signal channel,然后通知senders去停止向channel发送数据。因为receiver不能去关闭channel,这样senders将会触发panic,
但是我们可以让receiver通知signal channel来告诉senders来停止发送。
package main
import (
"log"
"math/rand"
"sync"
"time"
)
func main() {
rand.Seed(time.Now().UnixNano())
log.SetFlags(0)
// ...
const MaxRandomNumber = 100000
const NumSenders = 1000
wgReceivers := sync.WaitGroup{}
wgReceivers.Add(1)
// 发送数据的channel
dataCh := make(chan int, 100)
// 无缓冲的channel作为信号量,通知senders的推出
stopCh := make(chan struct{})
// 启动个NumSenders个sender
for i := 0; i < NumSenders; i++ {
go func() {
for {
value := rand.Intn(MaxRandomNumber)
// 监测到退出信号,马上退出goroutine
// 否则正常写入dataCh,数据
select {
case <-stopCh:
return
case dataCh <- value:
}
}
}()
}
// 消费者
go func() {
defer wgReceivers.Done()
for value := range dataCh {
// 某个场景下发出退出的信号量
if value == MaxRandomNumber-1 {
close(stopCh)
return
}
log.Println(value)
}
}()
wgReceivers.Wait()
}
通过stopCh来,作为信号量,来通知发送者的goroutine退出。
M个receiver,N个sender
这是比较复杂的一个,相比上面的一个receiver,M个receiver中任意一个receiver发出关闭的信息,需要同步到其他的receiver,防止其他的receiver,
再次发出关闭的请求,出发panic。
package main
import (
"log"
"math/rand"
"strconv"
"sync"
"time"
)
func main() {
rand.Seed(time.Now().UnixNano())
log.SetFlags(0)
const MaxRandomNumber = 100000
const NumReceivers = 10
const NumSenders = 1000
wgReceivers := sync.WaitGroup{}
wgReceivers.Add(NumReceivers)
// 数据的channel
dataCh := make(chan int, 100)
// 关闭的channel的信号
stopCh := make(chan struct{})
// toStop通知关闭stopCh,同时作为receiver退出的信息
toStop := make(chan string, 1)
var stoppedBy string
// 当收到toStop的信号,关闭stopCh
go func() {
stoppedBy = <-toStop
close(stopCh)
}()
// 发送端
for i := 0; i < NumSenders; i++ {
go func(id string) {
for {
value := rand.Intn(MaxRandomNumber)
// 满足条件发出关闭的请求到toStop
if value == 0 {
select {
case toStop <- "sender#" + id:
default:
}
return
}
select {
// 检测的关闭的stopCh,退出发送者
case <-stopCh:
return
case dataCh <- value:
}
}
}(strconv.Itoa(i))
}
// 接收端
for i := 0; i < NumReceivers; i++ {
go func(id string) {
defer wgReceivers.Done()
for {
select {
// 检测的关闭的stopCh,退出接收者
case <-stopCh:
return
case value := <-dataCh:
// 满足条件发出关闭的请求到toStop
if value == MaxRandomNumber-1 {
select {
case toStop <- "receiver#" + id:
default:
}
return
}
log.Println(value)
}
}
}(strconv.Itoa(i))
}
wgReceivers.Wait()
log.Println("stopped by", stoppedBy)
}
这样的设计就很好了,可以在sender和receiver两端发出关闭的请求。保证了sender和receiver都能够退出。
关闭的 channel 仍能读出数据
从一个有缓冲的channel里面读取数据,当channel被关闭了,仍能读出有效值。只有当返回的ok为false,读出的是无效的,也就是数据的零值。
package main
import "fmt"
func main() {
ch := make(chan int, 5)
ch <- 18
close(ch)
x, ok := <-ch
if ok {
fmt.Println("received: ", x)
}
x, ok = <-ch
if !ok {
fmt.Println("channel closed, data invalid.")
// ok为false
fmt.Println(x)
}
}
一个有缓冲的channel,写入了一个数据,当返回的ok为false,取出的数据就是定义类型的零值。
received: 18
channel closed, data invalid.
0
控制goroutine的数量
go中在大量并发的情况下会产生很多的goroutine,而goroutine使用之后,是不会被完全回收的,大概会有2kb的空间,所以我们希望控制下goroytine的
并发数量。
func main() {
jobsCount := 100
group := sync.WaitGroup{}
var jobsChan = make(chan int, 3)
// a) 生成指定数目的 goroutine,每个 goroutine 消费 jobsChan 中的数据
poolCount := 3
for i := 1; i < poolCount; i++ {
go func() {
for j := range jobsChan {
fmt.Printf("hello %d
", j)
time.Sleep(time.Second)
group.Done()
}
}()
}
// b) 把 job 依次推送到 jobsChan 供 goroutine 消费
for i := 0; i < jobsCount; i++ {
jobsChan <- i
group.Add(1)
fmt.Printf("index: %d,goroutine Num: %d
", i, runtime.NumGoroutine())
}
group.Wait()
fmt.Println("done!")
}
range和select读取channel的内容区别
range读取channel内容
range读取channel里面的内容,会自动等待channel的动作一直到channel被关闭,然后把channel里面的内容全部读出来。
package main
import "fmt"
func main() {
queue := make(chan string, 2)
queue <- "one"
queue <- "two"
close(queue)
for elem := range queue {
fmt.Println(elem)
}
}
输出打印的结果
one
two
select读取channel内容
select关键字用于多个channel的结合,这些channel会通过类似于are-you-ready polling的机制来工作。
package main
import (
"fmt"
"time"
)
func main() {
c1 := make(chan string)
c2 := make(chan string)
go func() {
time.Sleep(1 * time.Second)
c1 <- "one"
}()
go func() {
time.Sleep(2 * time.Second)
c2 <- "two"
}()
for i := 0; i < 2; i++ {
select {
case msg1 := <-c1:
fmt.Println("received", msg1)
case msg2 := <-c2:
fmt.Println("received", msg2)
}
}
}
打印下输出的效果
received one
received two
需要注意的点
| 操作 | nil channel | closed channel | not nil ,not closed |
|---|---|---|---|
| close | panic | panic | 正常关闭 |
| 读<-ch | 阻塞 | 里面的内容读完了,之后获取到的是类型的零值 | 阻塞或正常读取数据。缓冲型 channel 为空或非缓冲型 channel 没有等待发送者时会阻塞 |
| 写ch<- | 阻塞 | panic | 阻塞或正常写入数据。非缓冲型 channel 没有等待接收者或缓冲型 channel buf 满时会被阻塞 |
发送和接收的本质
Remember all transfer of value on the go channels happens with the copy of value.
和go中函数一样,channel中发送和接收的操作都是值传递。
参考
【Go的CSP并发模型】https://www.jianshu.com/p/a3c9a05466e1
【goroutine, channel 和 CSP】http://www.moye.me/2017/05/05/go-concurrency-patterns/
【通过同步和加锁解决多线程的线程安全问题】https://blog.ailemon.me/2019/05/15/solving-multithreaded-thread-safety-problems-by-synchronization-and-locking/
【golang channel 有缓冲 与 无缓冲 的重要区别】https://my.oschina.net/u/157514/blog/149192
【Golang channel 源码深度剖析】https://www.cyhone.com/articles/analysis-of-golang-channel/
【《Go专家编程》Go channel实现原理剖析】https://my.oschina.net/renhc/blog/2246871
【深度解密Go语言之channel】https://www.cnblogs.com/qcrao-2018/p/11220651.html
【如何优雅地关闭Go channel】https://www.jianshu.com/p/d24dfbb33781
【Go by Example: Range over Channels】https://gobyexample.com/range-over-channels
【Go by Example: Select】https://gobyexample.com/select