迪杰斯特拉
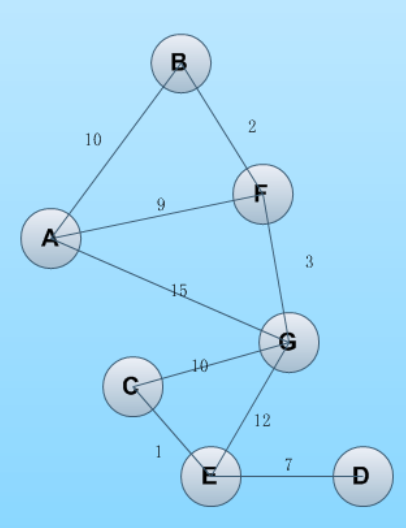
INF_val = 100000 class Dijkstra_Path(): def __init__(self, node_map): self.node_map = node_map self.node_length = len(node_map) self.used_node_list = [] self.collected_node_dict = {} def __call__(self, from_node, to_node): self.from_node = from_node self.to_node = to_node self._init_dijkstra() return self._format_path() def _init_dijkstra(self): ## Add from_node to used_node_list self.used_node_list.append(self.from_node) for index1 in range(self.node_length): self.collected_node_dict[index1] = [INF_val, -1] self.collected_node_dict[self.from_node] = [0, -1] # from_node don't have pre_node for index1, weight_val in enumerate(self.node_map[self.from_node]): if weight_val: self.collected_node_dict[index1] = [weight_val, self.from_node] # [weight_val, pre_node] self._foreach_dijkstra() def _foreach_dijkstra(self): while(len(self.used_node_list) < self.node_length - 1): min_key = -1 min_val = INF_val for key, val in self.collected_node_dict.items(): # 遍历已有权值节点 if val[0] < min_val and key not in self.used_node_list: min_key = key min_val = val[0] ## 把最小的值加入到used_node_list if min_key != -1: self.used_node_list.append(min_key) for index1, weight_val in enumerate(self.node_map[min_key]): ## 对刚加入到used_node_list中的节点的相邻点进行遍历比较 if weight_val > 0 and self.collected_node_dict[index1][0] > weight_val + min_val: self.collected_node_dict[index1][0] = weight_val + min_val # update weight_val self.collected_node_dict[index1][1] = min_key def _format_path(self): node_list = [] temp_node = self.to_node node_list.append((temp_node, self.collected_node_dict[temp_node][0])) while self.collected_node_dict[temp_node][1] != -1: temp_node = self.collected_node_dict[temp_node][1] node_list.append((temp_node, self.collected_node_dict[temp_node][0])) node_list.reverse() return node_list def set_node_map(node_map, node, node_list): for x, y, val in node_list: node_map[node.index(x)][node.index(y)] = node_map[node.index(y)][node.index(x)] = val if __name__ == "__main__": node = ['A', 'B', 'C', 'D', 'E', 'F', 'G'] //顶点 node_list = [('A', 'F', 9), ('A', 'B', 10), ('A', 'G', 15), ('B', 'F', 2), //点与点间的距离 ('G', 'F', 3), ('G', 'E', 12), ('G', 'C', 10), ('C', 'E', 1), ('E', 'D', 7)] ## init node_map to 0 node_map = [[0 for val in range(len(node))] for val in range(len(node))] ## set node_map set_node_map(node_map, node, node_list) ## select one node to obj node, e.g. A --> D(node[0] --> node[3]) from_node = node.index('A') to_node = node.index('E') dijkstrapath = Dijkstra_Path(node_map) path = dijkstrapath(from_node, to_node) print(path)
------------------------------------------------------------------------------
[(0, 0), (5, 9), (6, 12), (2, 22), (4, 23)] (点,权值)
Floyd算法(Floyd-Warshallalgorithm)又称为弗洛伊德算法
INF_val = 9999
class Floyd_Path():
def __init__(self, node, node_map, path_map):
self.node = node
self.node_map = node_map
self.node_length = len(node_map)
self.path_map = path_map
self._init_Floyd()
def __call__(self, from_node, to_node):
self.from_node = from_node
self.to_node = to_node
return self._format_path()
def _init_Floyd(self):
for k in range(self.node_length):
for i in range(self.node_length):
for j in range(self.node_length):
tmp = self.node_map[i][k] + self.node_map[k][j]
if self.node_map[i][j] > tmp:
self.node_map[i][j] = tmp
self.path_map[i][j] = self.path_map[i][k]
print('_init_Floyd is end')
def _format_path(self):
node_list = []
temp_node = self.from_node
obj_node = self.to_node
print("the shortest path is: %d"%(self.node_map[temp_node][obj_node]))
node_list.append(self.node[temp_node])
while True:
node_list.append(self.node[self.path_map[temp_node][obj_node]])
temp_node = self.path_map[temp_node][obj_node]
if temp_node == obj_node:
break;
return node_list
def set_node_map(node_map, node, node_list, path_map):
for i in range(len(node)):
## 对角线为0
node_map[i][i] = 0
for x, y, val in node_list:
node_map[node.index(x)][node.index(y)] = node_map[node.index(y)][node.index(x)] = val
path_map[node.index(x)][node.index(y)] = node.index(y)
path_map[node.index(y)][node.index(x)] = node.index(x)
if __name__ == "__main__":
node = ['A', 'B', 'C', 'D', 'E', 'F', 'G']
node_list = [('A', 'F', 9), ('A', 'B', 10), ('A', 'G', 15), ('B', 'F', 2),
('G', 'F', 3), ('G', 'E', 12), ('G', 'C', 10), ('C', 'E', 1),
('E', 'D', 7)]
## node_map[i][j] 存储i到j的最短距离
node_map = [[INF_val for val in range(len(node))] for val in range(len(node))]
## path_map[i][j]=j 表示i到j的最短路径是经过顶点j
path_map = [[0 for val in range(len(node))] for val in range(len(node))]
## set node_map
set_node_map(node_map, node, node_list, path_map)
## select one node to obj node, e.g. A --> D(node[0] --> node[3])
from_node = node.index('A') //起点
to_node = node.index('E') //终点
Floydpath = Floyd_Path(node, node_map, path_map)
path = Floydpath(from_node, to_node)
print(path)
-----------------------------------------------------------------------------------------
_init_Floyd is end the shortest path is: 23 ['A', 'F', 'G', 'C', 'E']