利用OpenCV霍夫变换检测出圆
【OpenCV入门教程之十四】OpenCV霍夫变换:霍夫线变换,霍夫圆变换合辑
Opencv--HoughCircles源码剖析
HoughCircles函数可以利用霍夫变换算法检测出灰度图中的圆。它和之前的HoughLines和HoughLinesP比较明显的一个区别是它不需要源图是二值的,而HoughLines和HoughLinesP都需要源图为二值图像。
1 void HoughCircles(InputArray image,OutputArray circles, int method, double dp, double minDist, double param1=100,double param2=100, int minRadius=0, int maxRadius=0 )
- 第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的灰度单通道图像。
- 第二个参数,InputArray类型的circles,经过调用HoughCircles函数后此参数存储了检测到的圆的输出矢量,每个矢量由包含了3个元素的浮点矢量(x, y, radius)表示。
- 第三个参数,int类型的method,即使用的检测方法,目前OpenCV中就霍夫梯度法一种可以使用,它的标识符为CV_HOUGH_GRADIENT,在此参数处填这个标识符即可。
- 第四个参数,double类型的dp,用来检测圆心的累加器图像的分辨率于输入图像之比的倒数,且此参数允许创建一个比输入图像分辨率低的累加器。上述文字不好理解的话,来看例子吧。例如,如果dp= 1时,累加器和输入图像具有相同的分辨率。如果dp=2,累加器便有输入图像一半那么大的宽度和高度。
- 第五个参数,double类型的minDist,为霍夫变换检测到的圆的圆心之间的最小距离,即让我们的算法能明显区分的两个不同圆之间的最小距离。这个参数如果太小的话,多个相邻的圆可能被错误地检测成了一个重合的圆。反之,这个参数设置太大的话,某些圆就不能被检测出来了。
- 第六个参数,double类型的param1,有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示传递给canny边缘检测算子的高阈值,而低阈值为高阈值的一半。
- 第七个参数,double类型的param2,也有默认值100。它是第三个参数method设置的检测方法的对应的参数。对当前唯一的方法霍夫梯度法CV_HOUGH_GRADIENT,它表示在检测阶段圆心的累加器阈值。它越小的话,就可以检测到更多根本不存在的圆,而它越大的话,能通过检测的圆就更加接近完美的圆形了。
- 第八个参数,int类型的minRadius,有默认值0,表示圆半径的最小值。
- 第九个参数,int类型的maxRadius,也有默认值0,表示圆半径的最大值。
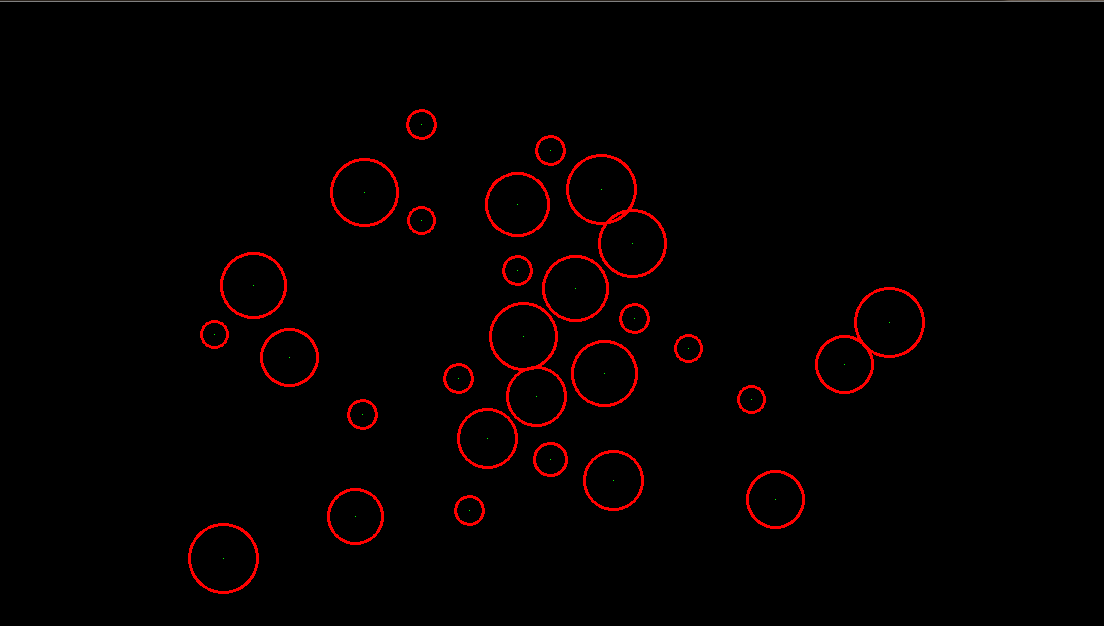
1 Mat src_color = imread("C:/Users/Administrator/Desktop/环形计数专利/样本图像/白环.png");//读取原彩色图 2 //imshow("原图-彩色", src_color); 3 4 //声明一个三通道图像,像素值全为0,用来将霍夫变换检测出的圆画在上面 5 Mat dst(src_color.size(), src_color.type()); 6 dst = Scalar::all(0); 7 8 Mat src_gray;//彩色图像转化成灰度图 9 cvtColor(src_color, src_gray, CV_BGR2GRAY); 10 threshold(src_gray, src_gray, 100, 255, CV_THRESH_OTSU); 11 src_gray = 255 - src_gray; 12 imshow("原图-灰度", src_gray); 13 //imwrite("src_gray.png", src_gray); 14 15 Mat bf;//对灰度图像进行双边滤波 16 bilateralFilter(src_gray, bf, kvalue, kvalue * 2, kvalue / 2); 17 //imshow("灰度双边滤波处理", bf); 18 //imwrite("src_bf.png", bf); 19 20 vector<Vec3f> circles;//声明一个向量,保存检测出的圆的圆心坐标和半径 21 HoughCircles(bf, circles, CV_HOUGH_GRADIENT, 1.5, 20, 130, 38, 10, 50);//霍夫变换检测圆 22 cout << circles.size() << endl; 23 //cout << "x= y= r=" << endl; 24 25 for (size_t i = 0; i < circles.size(); i++)//把霍夫变换检测出的圆画出来 26 { 27 Point center(cvRound(circles[i][0]), cvRound(circles[i][1])); 28 int radius = cvRound(circles[i][2]); 29 30 circle(dst, center, 0, Scalar(0, 255, 0), -1, 8, 0); 31 circle(dst, center, radius, Scalar(0, 0, 255), 2, 8, 0); 32 33 //cout << cvRound(circles[i][0]) << " " << cvRound(circles[i][1]) << " " 34 //<< cvRound(circles[i][2]) << endl;//在控制台输出圆心坐标和半径 35 } 36 37 imshow("特征提取", dst); 38 //imwrite("dst.png", dst); 39 40 waitKey();
霍夫梯度法的缺点
<1> 在霍夫梯度法中,使用Sobel导数来计算局部梯度,其可以视作等同于一条局部切线,这不是一个数值稳定的做法。在大多数情况下,这样做会得到正确的结果,但或许会在输出中产生一些噪声。
<2> 在边缘图像中的整个非0像素集被看做每个中心的候选部分。因此,如果把累加器的阈值设置偏低,算法将要消耗比较长的时间。第三,因为每一个中心只选择一个圆,如果有同心圆,就只能选择其中的一个。
<3> 因为中心是按照其关联的累加器值的升序排列的,并且如果新的中心过于接近之前已经接受的中心的话,就不会被保留下来。且当有许多同心圆或者是近似的同心圆时,霍夫梯度法的倾向是保留最大的一个圆。可以说这是一种比较极端的做法,因为在这里默认Sobel导数会产生噪声,若是对于无穷分辨率的平滑图像而言的话,这才是必须的。


从实际运行的结果来看,我们发现HoughCircles函数不足之处是所需要的参数较多,而且每个参数的改变对结果影响都很大,即漏检和错检的几率很大。