前言:本文主要讲YOLOv3中数据加载部分,主要解析的代码在utils/datasets.py文件中。通过对数据组织、加载、处理部分代码进行解读,能帮助我们更快地理解YOLOv3所要求的数据输出要求,也将有利于对之后训练部分代码进行理解。
1. 标注格式
在上一篇【从零开始学习YOLOv3】2. YOLOv3中的代码配置和数据集构建 中,使用到了voc_label.py,其作用是将xml文件转成txt文件格式,具体文件如下:
# class id, x, y, w, h
0 0.8604166666666666 0.5403899721448469 0.058333333333333334 0.055710306406685235
其中的x,y 的意义是归一化以后的框的中心坐标,w,h是归一化后的框的宽和高。
具体的归一化方式为:
def convert(size, box):
'''
size是图片的长和宽
box是xmin,xmax,ymin,ymax坐标值
'''
dw = 1. / (size[0])
dh = 1. / (size[1])
# 得到长和宽的缩放比
x = (box[0] + box[1])/2.0 - 1
y = (box[2] + box[3])/2.0 - 1
w = box[1] - box[0]
h = box[3] - box[2]
# 分别计算中心点坐标,框的宽和高
x = x * dw
w = w * dw
y = y * dh
h = h * dh
# 按照图片长和宽进行归一化
return (x,y,w,h)
可以看出,归一化都是相对于图片的宽和高进行归一化的。
2. 调用
下边是train.py文件中的有关数据的调用:
# Dataset
dataset = LoadImagesAndLabels(train_path, img_size, batch_size,
augment=True,
hyp=hyp, # augmentation hyperparameters
rect=opt.rect, # rectangular training
cache_labels=True,
cache_images=opt.cache_images)
batch_size = min(batch_size, len(dataset))
# 使用多少个线程加载数据集
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 1])
dataloader = DataLoader(dataset,
batch_size=batch_size,
num_workers=nw,
shuffle=not opt.rect,
# Shuffle=True
#unless rectangular training is used
pin_memory=True,
collate_fn=dataset.collate_fn)
在pytorch中,数据集加载主要是重构datasets类,然后再使用dataloader中加载dataset,就构建好了数据部分。
下面是一个简单的使用模板:
import os
from torch.utils.data import Dataset
from torch.utils.data import DataLoader
# 根据自己的数据集格式进行重构
class MyDataset(Dataset):
def __init__(self):
#下载数据、初始化数据,都可以在这里完成
xy = np.loadtxt('label.txt', delimiter=',', dtype=np.float32)
# 使用numpy读取数据
self.x_data = torch.from_numpy(xy[:, 0:-1])
self.y_data = torch.from_numpy(xy[:, [-1]])
self.len = xy.shape[0]
def __getitem__(self, index):
# dataloader中使用该方法,通过index进行访问
return self.x_data[index], self.y_data[index]
def __len__(self):
# 查询数据集中数量,可以通过len(mydataset)得到
return self.len
# 实例化这个类,然后我们就得到了Dataset类型的数据,记下来就将这个类传给DataLoader,就可以了。
myDataset = MyDataset()
# 构建dataloader
train_loader = DataLoader(dataset=myDataset,
batch_size=32,
shuffle=True)
for epoch in range(2):
for i, data in enumerate(train_loader2):
# 将数据从 train_loader 中读出来,一次读取的样本数是32个
inputs, labels = data
# 将这些数据转换成Variable类型
inputs, labels = Variable(inputs), Variable(labels)
# 模型训练...
通过以上模板就能大致了解pytorch中的数据加载机制,下面开始介绍YOLOv3中的数据加载。
3. YOLOv3中的数据加载
下面解析的是LoadImagesAndLabels类中的几个主要的函数:
3.1 init函数
init函数中包含了大部分需要处理的数据
class LoadImagesAndLabels(Dataset): # for training/testing
def __init__(self,
path,
img_size=416,
batch_size=16,
augment=False,
hyp=None,
rect=False,
image_weights=False,
cache_labels=False,
cache_images=False):
path = str(Path(path)) # os-agnostic
assert os.path.isfile(path), 'File not found %s. See %s' % (path,
help_url)
with open(path, 'r') as f:
self.img_files = [
x.replace('/', os.sep)
for x in f.read().splitlines() # os-agnostic
if os.path.splitext(x)[-1].lower() in img_formats
]
# img_files是一个list,保存的是图片的路径
n = len(self.img_files)
assert n > 0, 'No images found in %s. See %s' % (path, help_url)
bi = np.floor(np.arange(n) / batch_size).astype(np.int) # batch index
# 如果n=10, batch=2, bi=[0,0,1,1,2,2,3,3,4,4]
nb = bi[-1] + 1 # 最多有多少个batch
self.n = n
self.batch = bi # 图片的batch索引,代表第几个batch的图片
self.img_size = img_size
self.augment = augment
self.hyp = hyp
self.image_weights = image_weights # 是否选择根据权重进行采样
self.rect = False if image_weights else rect
# 如果选择根据权重进行采样,将无法使用矩形训练:
# 具体内容见下文
# 标签文件是通过images替换为labels, .jpg替换为.txt得到的。
self.label_files = [
x.replace('images',
'labels').replace(os.path.splitext(x)[-1], '.txt')
for x in self.img_files
]
# 矩形训练具体内容见下文解析
if self.rect:
# 获取图片的长和宽 (wh)
sp = path.replace('.txt', '.shapes')
# 字符串替换
# shapefile path
try:
with open(sp, 'r') as f: # 读取shape文件
s = [x.split() for x in f.read().splitlines()]
assert len(s) == n, 'Shapefile out of sync'
except:
s = [
exif_size(Image.open(f))
for f in tqdm(self.img_files, desc='Reading image shapes')
]
np.savetxt(sp, s, fmt='%g') # overwrites existing (if any)
# 根据长宽比进行排序
s = np.array(s, dtype=np.float64)
ar = s[:, 1] / s[:, 0] # aspect ratio
i = ar.argsort()
# 根据顺序重排顺序
self.img_files = [self.img_files[i] for i in i]
self.label_files = [self.label_files[i] for i in i]
self.shapes = s[i] # wh
ar = ar[i]
# 设置训练的图片形状
shapes = [[1, 1]] * nb
for i in range(nb):
ari = ar[bi == i]
mini, maxi = ari.min(), ari.max()
if maxi < 1:
shapes[i] = [maxi, 1]
elif mini > 1:
shapes[i] = [1, 1 / mini]
self.batch_shapes = np.ceil(
np.array(shapes) * img_size / 32.).astype(np.int) * 32
# 预载标签
# weighted CE 训练时需要这个步骤
# 否则无法按照权重进行采样
self.imgs = [None] * n
self.labels = [None] * n
if cache_labels or image_weights: # cache labels for faster training
self.labels = [np.zeros((0, 5))] * n
extract_bounding_boxes = False
create_datasubset = False
pbar = tqdm(self.label_files, desc='Caching labels')
nm, nf, ne, ns, nd = 0, 0, 0, 0, 0 # number missing, found, empty, datasubset, duplicate
for i, file in enumerate(pbar):
try:
# 读取每个文件内容
with open(file, 'r') as f:
l = np.array(
[x.split() for x in f.read().splitlines()],
dtype=np.float32)
except:
nm += 1 # print('missing labels for image %s' % self.img_files[i]) # file missing
continue
if l.shape[0]:
# 判断文件内容是否符合要求
# 所有的值需要>0, <1, 一共5列
assert l.shape[1] == 5, '> 5 label columns: %s' % file
assert (l >= 0).all(), 'negative labels: %s' % file
assert (l[:, 1:] <= 1).all(
), 'non-normalized or out of bounds coordinate labels: %s' % file
if np.unique(
l, axis=0).shape[0] < l.shape[0]: # duplicate rows
nd += 1 # print('WARNING: duplicate rows in %s' % self.label_files[i]) # duplicate rows
self.labels[i] = l
nf += 1 # file found
# 创建一个小型的数据集进行试验
if create_datasubset and ns < 1E4:
if ns == 0:
create_folder(path='./datasubset')
os.makedirs('./datasubset/images')
exclude_classes = 43
if exclude_classes not in l[:, 0]:
ns += 1
# shutil.copy(src=self.img_files[i], dst='./datasubset/images/') # copy image
with open('./datasubset/images.txt', 'a') as f:
f.write(self.img_files[i] + '
')
# 为两阶段分类器提取目标检测的检测框
# 默认开关是关掉的,不是很理解
if extract_bounding_boxes:
p = Path(self.img_files[i])
img = cv2.imread(str(p))
h, w = img.shape[:2]
for j, x in enumerate(l):
f = '%s%sclassifier%s%g_%g_%s' % (p.parent.parent,
os.sep, os.sep,
x[0], j, p.name)
if not os.path.exists(Path(f).parent):
os.makedirs(Path(f).parent)
# make new output folder
b = x[1:] * np.array([w, h, w, h]) # box
b[2:] = b[2:].max() # rectangle to square
b[2:] = b[2:] * 1.3 + 30 # pad
b = xywh2xyxy(b.reshape(-1,4)).ravel().astype(np.int)
b[[0,2]] = np.clip(b[[0, 2]], 0,w) # clip boxes outside of image
b[[1, 3]] = np.clip(b[[1, 3]], 0, h)
assert cv2.imwrite(f, img[b[1]:b[3], b[0]:b[2]]), 'Failure extracting classifier boxes'
else:
ne += 1
pbar.desc = 'Caching labels (%g found, %g missing, %g empty, %g duplicate, for %g images)'
% (nf, nm, ne, nd, n) # 统计发现,丢失,空,重复标签的数量。
assert nf > 0, 'No labels found. See %s' % help_url
# 将图片加载到内存中,可以加速训练
# 警告:如果在数据比较多的情况下可能会超出RAM
if cache_images: # if training
gb = 0 # 计算缓存到内存中的图片占用的空间GB为单位
pbar = tqdm(range(len(self.img_files)), desc='Caching images')
self.img_hw0, self.img_hw = [None] * n, [None] * n
for i in pbar: # max 10k images
self.imgs[i], self.img_hw0[i], self.img_hw[i] = load_image(
self, i) # img, hw_original, hw_resized
gb += self.imgs[i].nbytes
pbar.desc = 'Caching images (%.1fGB)' % (gb / 1E9)
# 删除损坏的文件
# 根据需要进行手动开关
detect_corrupted_images = False
if detect_corrupted_images:
from skimage import io # conda install -c conda-forge scikit-image
for file in tqdm(self.img_files,
desc='Detecting corrupted images'):
try:
_ = io.imread(file)
except:
print('Corrupted image detected: %s' % file)
Rectangular inference(矩形推理)
- 矩形推理是在detect.py,也就是测试过程中的实现,可以减少推理时间。YOLOv3中是下采样32倍,长宽也必须是32的倍数,所以在进入模型前,数据需要处理到416×416大小,这个过程称为仿射变换,如果用opencv实现可以用以下代码:
# 来自 https://zhuanlan.zhihu.com/p/93822508
def cv2_letterbox_image(image, expected_size):
ih, iw = image.shape[0:2]
ew, eh = expected_size
scale = min(eh / ih, ew / iw)
nh = int(ih * scale)
nw = int(iw * scale)
image = cv2.resize(image, (nw, nh), interpolation=cv2.INTER_CUBIC)
top = (eh - nh) // 2
bottom = eh - nh - top
left = (ew - nw) // 2
right = ew - nw - left
new_img = cv2.copyMakeBorder(image, top, bottom, left, right, cv2.BORDER_CONSTANT)
return new_img
比如下图是一个h>w,一个是w>h的图片经过仿射变换后resize到416×416的示例:
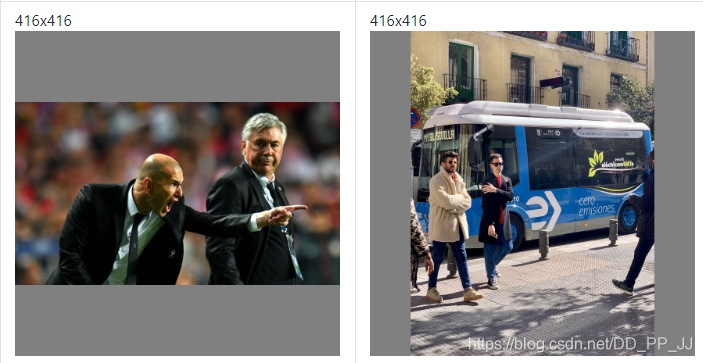
以上就是正方形推理,但是可以看出以上通过补充得到的结果会存在很多冗余信息,而Rectangular Training思路就是想要去掉这些冗余的部分。
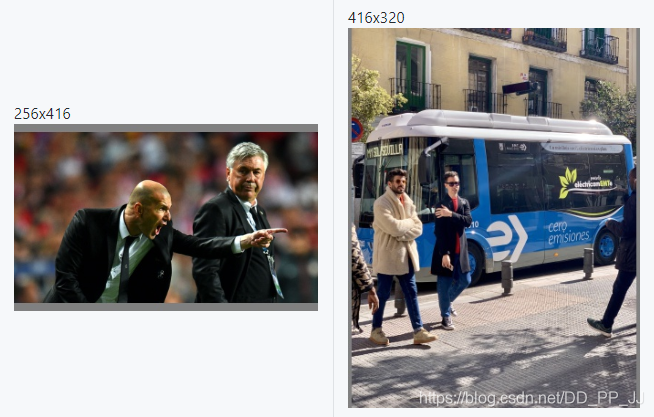
具体过程为:求得较长边缩放到416的比例,然后对图片w:h按这个比例缩放,使得较长边达到416,再对较短边进行尽量少的填充使得较短边满足32的倍数。
示例如下:
Rectangular Training(矩形训练)
很自然的,训练的过程也可以用到这个想法,减少冗余。不过训练的时候情况比较复杂,由于在训练过程中是一个batch的图片,而每个batch图片是有可能长宽比不同的,这就是与测试最大的区别。具体是实现是取这个batch中最大的场合宽,然后将整个batch中填充到max width和max height,这样操作对小一些的图片来说也是比较浪费。这里的yolov3的实现主要就是优化了一下如何将比例相近的图片放在一个batch,这样显然填充的就更少一些了。作者在issue中提到,在coco数据集中使用这个策略进行训练,能够快1/3。
而如果选择开启矩形训练,必须要关闭dataloader中的shuffle参数,防止对数据的顺序进行调整。同时如果选择image_weights, 根据图片进行采样,也无法与矩阵训练同时使用。
3.2 getitem函数
def __getitem__(self, index):
# 新的下角标
if self.image_weights:
index = self.indices[index]
img_path = self.img_files[index]
label_path = self.label_files[index]
hyp = self.hyp
mosaic = True and self.augment
# 如果开启镶嵌增强、数据增强
# 加载四张图片,作为一个镶嵌,具体看下文解析。
if mosaic:
# 加载镶嵌内容
img, labels = load_mosaic(self, index)
shapes = None
else:
# 加载图片
img, (h0, w0), (h, w) = load_image(self, index)
# 仿射变换
shape = self.batch_shapes[self.batch[
index]] if self.rect else self.img_size
img, ratio, pad = letterbox(img,
shape,
auto=False,
scaleup=self.augment)
shapes = (h0, w0), (
(h / h0, w / w0), pad)
# 加载标注文件
labels = []
if os.path.isfile(label_path):
x = self.labels[index]
if x is None: # 如果标签没有加载,读取label_path内容
with open(label_path, 'r') as f:
x = np.array(
[x.split() for x in f.read().splitlines()],
dtype=np.float32)
if x.size > 0:
# 将归一化后的xywh转化为左上角、右下角的表达形式
labels = x.copy()
labels[:, 1] = ratio[0] * w * (
x[:, 1] - x[:, 3] / 2) + pad[0] # pad width
labels[:, 2] = ratio[1] * h * (
x[:, 2] - x[:, 4] / 2) + pad[1] # pad height
labels[:, 3] = ratio[0] * w * (x[:, 1] +
x[:, 3] / 2) + pad[0]
labels[:, 4] = ratio[1] * h * (x[:, 2] +
x[:, 4] / 2) + pad[1]
if self.augment:
# 图片空间的数据增强
if not mosaic:
# 如果没有使用镶嵌的方法,那么对图片进行随机放射
img, labels = random_affine(img,
labels,
degrees=hyp['degrees'],
translate=hyp['translate'],
scale=hyp['scale'],
shear=hyp['shear'])
# 增强hsv空间
augment_hsv(img,
hgain=hyp['hsv_h'],
sgain=hyp['hsv_s'],
vgain=hyp['hsv_v'])
nL = len(labels) # 标注文件个数
if nL:
# 将 xyxy 格式转化为 xywh 格式
labels[:, 1:5] = xyxy2xywh(labels[:, 1:5])
# 归一化到0-1之间
labels[:, [2, 4]] /= img.shape[0] # height
labels[:, [1, 3]] /= img.shape[1] # width
if self.augment:
# 随机左右翻转
lr_flip = True
if lr_flip and random.random() < 0.5:
img = np.fliplr(img)
if nL:
labels[:, 1] = 1 - labels[:, 1]
# 随机上下翻转
ud_flip = False
if ud_flip and random.random() < 0.5:
img = np.flipud(img)
if nL:
labels[:, 2] = 1 - labels[:, 2]
labels_out = torch.zeros((nL, 6))
if nL:
labels_out[:, 1:] = torch.from_numpy(labels)
# 图像维度转换
img = img[:, :, ::-1].transpose(2, 0, 1) # BGR to RGB, to 3x416x416
img = np.ascontiguousarray(img)
return torch.from_numpy(img), labels_out, img_path, shapes
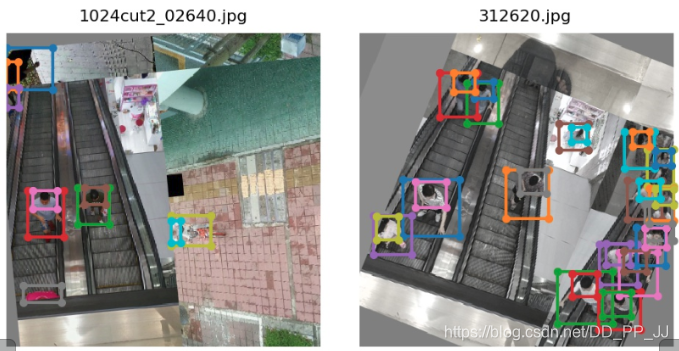
下图是开启了镶嵌和旋转以后的增强效果(mosaic不知道翻译的对不对,如果有问题,欢迎指正。)
这里理解镶嵌就是将四张图片,以不同的比例,合成为一张图片。
3.3 collate_fn函数
@staticmethod
def collate_fn(batch):
img, label, path, shapes = zip(*batch) # transposed
for i, l in enumerate(label):
l[:, 0] = i # add target image index for build_targets()
return torch.stack(img, 0), torch.cat(label, 0), path, shapes
还有最后一点内容,是关于pytorch的数据读取机制,本人曾经单纯的认为dataloader仅仅是通过调用__getitem__(self, index),然后就可以直接返回结果。但是之前做过的一个项目打破了这样的认知,在pytorch的dataloader中是会对通过getitem方法得到的结果(batch)进行包装,而这个包装可能与我们想要的有所不同。默认的方法可以看以下代码:
def default_collate(batch):
r"""Puts each data field into a tensor with outer dimension batch size"""
elem_type = type(batch[0])
if isinstance(batch[0], torch.Tensor):
out = None
if _use_shared_memory:
# If we're in a background process, concatenate directly into a
# shared memory tensor to avoid an extra copy
numel = sum([x.numel() for x in batch])
storage = batch[0].storage()._new_shared(numel)
out = batch[0].new(storage)
return torch.stack(batch, 0, out=out)
elif elem_type.__module__ == 'numpy' and elem_type.__name__ != 'str_'
and elem_type.__name__ != 'string_':
elem = batch[0]
if elem_type.__name__ == 'ndarray':
# array of string classes and object
if np_str_obj_array_pattern.search(elem.dtype.str) is not None:
raise TypeError(error_msg_fmt.format(elem.dtype))
return default_collate([torch.from_numpy(b) for b in batch])
if elem.shape == (): # scalars
py_type = float if elem.dtype.name.startswith('float') else int
return numpy_type_map[elem.dtype.name](list(map(py_type, batch)))
elif isinstance(batch[0], float):
return torch.tensor(batch, dtype=torch.float64)
elif isinstance(batch[0], int_classes):
return torch.tensor(batch)
elif isinstance(batch[0], string_classes):
return batch
elif isinstance(batch[0], container_abcs.Mapping):
return {key: default_collate([d[key] for d in batch]) for key in batch[0]}
elif isinstance(batch[0], tuple) and hasattr(batch[0], '_fields'): # namedtuple
return type(batch[0])(*(default_collate(samples) for samples in zip(*batch)))
elif isinstance(batch[0], container_abcs.Sequence):
transposed = zip(*batch)
return [default_collate(samples) for samples in transposed]
raise TypeError((error_msg_fmt.format(type(batch[0]))))
会根据你的数据类型进行相应的处理,但是这往往不是我们需要的,所以需要修改collate_fn,具体内容请看代码,比较简单,就不多赘述。
后记:今天的代码读的比较费力,仅仅通过数据加载这部分就能感受到作者所添加的trick,还有思维的严禁,对数据的限制,处理,都已经提前想好了。不仅如此,作者还添加了巨多的数据增强方法,不仅有传统的仿射变换、上下翻转、左右翻转还有比较新颖的比如镶嵌。以上就是为各位大致理了一遍思路,具体的实现还需要再进行细细的琢磨,不过就使用而言,以上信息就已经足够。由于时间仓促,可能还有一些内容调查的不够严谨,比如说镶嵌这个翻译是否正确,欢迎有这方面了解的大佬与我沟通,期待您的指教。
参考文献
矩形训练相关:https://blog.csdn.net/songwsx/article/details/102639770
仿射变换:https://zhuanlan.zhihu.com/p/93822508
Rectangle Trainning:https://github.com/ultralytics/yolov3/issues/232