| 北京电子科技学院(BESTI) | ||
| 实 验 报 告 | ||
| 课程:信息安全系统设计基础 | 班级:1353 | 姓名:郑伟、吴子怡 |
| 学号:20135322、20135313 | 指导教师: 娄嘉鹏 | 实验日期:2015年11月17日 |
| 必修/选修:必修 | 实验序号:exp4 | 实验时间:15:30-18:00 |
| 实验名称: exp4_外设驱动程序设计 | ||
| 实验内容:在PC机上编写简单的虚拟硬件驱动程序并进行调试,实验驱动的各个接口函数的实现,分析并理解驱动与应用程序的交互过程。 | ||
| 实验目的与要求 | 1.学习在LINUX下进行驱动设计的原理; | |
| 2.掌握使用模块方式进行驱动开发调试的过程 。 | ||
| 实验器材 | 1、Lenovo计算机一台 | |
| 2、ARM实验箱一个 | ||
配置实验环境:同实验一。若不能熟练掌握,可点击如下链接查看详细步骤:
http://www.cnblogs.com/zhengwei0712/p/4960130.html <<exp1实验报告
一、实验步骤
1.阅读和理解源代码
进入/01_demo,使用vi编辑器阅读理解源代码。
2.编译驱动模块及测试程序
在 Makefile 中有两种编译方法,可以在本机上使用gcc 也可以使用交叉编译器进行编译,我们组采用交叉编译器进行编译。如下图:

注意:如果编译的时候出现问题,可能是在/usr/src 下没有建立一个linux 连接,可以使用下面的命令:
[root@zxt 01_demo]# cd /usr/src/ [root@zxt src]# ln -sf linux-2.4.20-8 linux [root@zxt src]# ls debug linux linux-2.4 linux-2.4.20-8 redhat
3.测试驱动程序
如果使用 gcc 编译的话,需要通过下面的命令来建立设备节点,如果使用交叉编译器的话,不需要建立设备节点。
#mknod /dev/demo c 254 0
首先要插入驱动模块demo.o,然后可以用lsmod 命令来查看模块是否已经被插入,在不使用该模块的时候还可以用rmmod 命令来将模块卸载。
我们使用交叉编译器,不需要建立设备节点。下图为步骤成功的结果。
驱动模块成功插入后,在/dev下面建立一个demo的审文件,使用cat来直接调用read函数,测试读过程。
如果模块没有成功插入的话,会出现下面的情况: [root@zxt 01_demo]# ./test_demo ####DEMO device open fail####
在驱动模块成功插入后,会在/dev 下面建立一个叫做demo 的设备文件,我们也可以使用cat 命令
来直接调用read 函数,来测试读过程。
[root@zxt demo]# cat /dev/demo/0 device open success!
二、遇到的问题与解决方法
在编译驱动模块的时候,makefile 有两种编译方法,可以用gcc,也可以用交叉编译器编译。当我们使用编译器进行编译的时候,出现了问题Error 1,如下图:
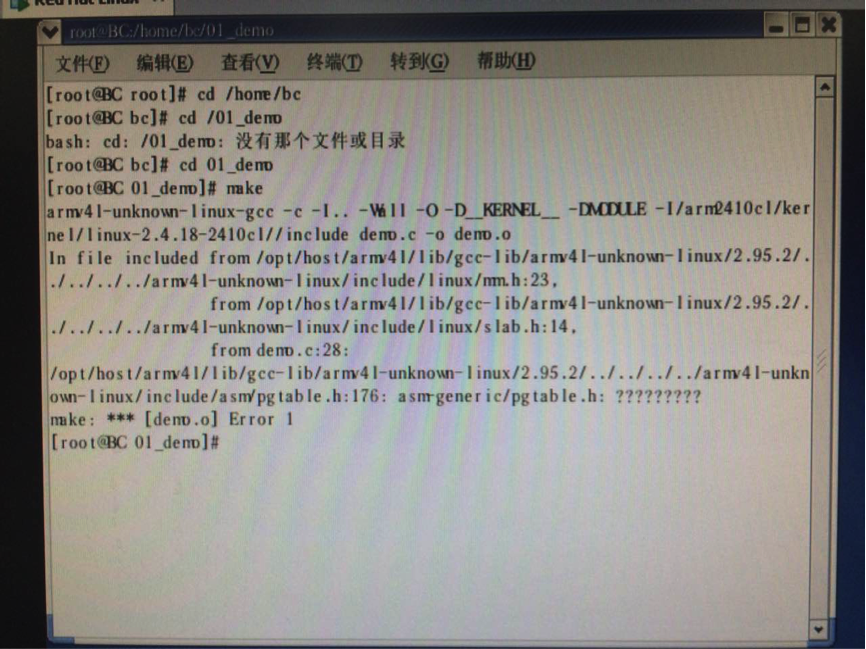
第一次,可能是/usr/src下没有建立 linux连接,所以使用命令,如下图:
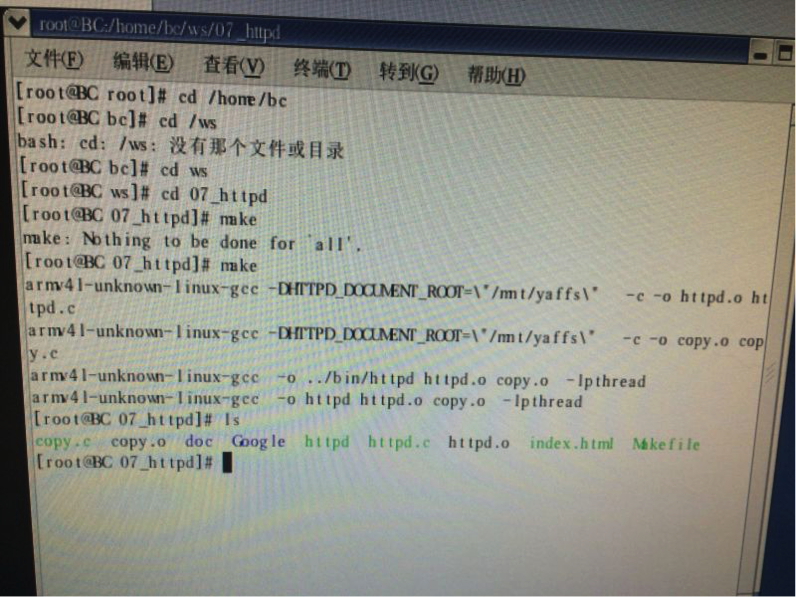
第二次,经过研究,发现是makefile里的编写文件,与实验指导书里的不一样,通过进入makefile文件,修改了路径,才编译通过,如下图:
附:代码分析
参考驱动代码 demo.c 如下,其中的 demo_read,demo_write 函数完成驱动的读写接口功能,do_write 函数实现将用户写入的数据逆序排列,通过读取函数读取转换后的数据。
这里只是演示接口的实现过程和内核驱动对用户的数据的处理。 Demo_ioctl函数演示ioctl调用接口的实现过程。
test_demo.c
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>//其中定义了很多宏和诸如open,close函数
#include <unistd.h>
#include <sys/ioctl.h>//ioctl函数的头文件
void showbuf(char *buf);
int MAX_LEN=32;
int main()
{
int fd;
int i;
char buf[255];
for(i=0; i<MAX_LEN; i++){//给数组元素依次赋值
buf[i]=i;
}
fd=open("/dev/demo",O_RDWR);//以既可以读又可以写的方式打开文件
if(fd < 0){
printf("####DEMO device open fail####
");
return (-1);
}
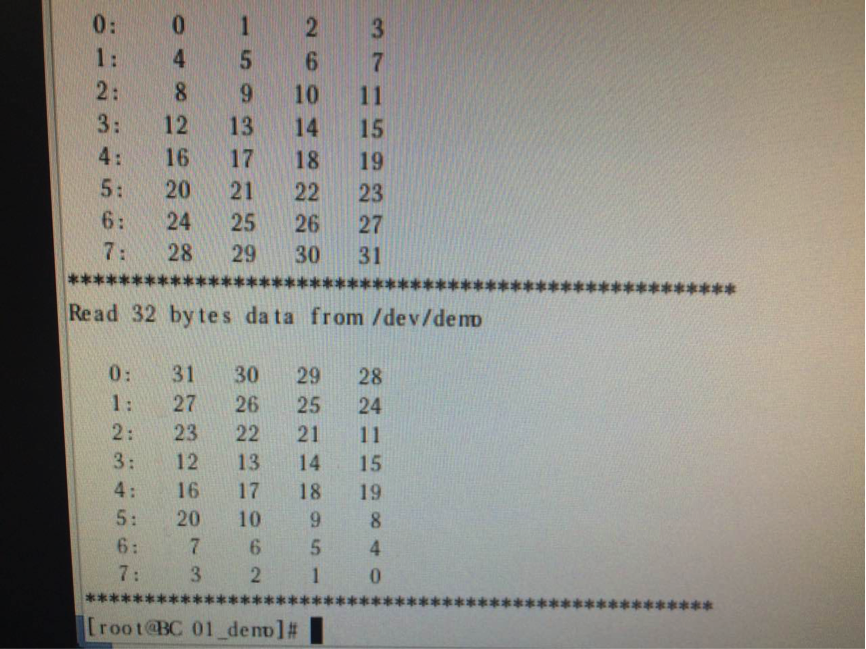
printf("write %d bytes data to /dev/demo
",MAX_LEN);
showbuf(buf);//先显示一下要写入什么,然后写入
write(fd,buf,MAX_LEN);
printf("Read %d bytes data from /dev/demo
",MAX_LEN);
read(fd,buf,MAX_LEN);
showbuf(buf);//先读出来字符串到buf中,再显示
ioctl(fd,1,NULL);
ioctl(fd,4,NULL);
close(fd);
return 0;
}
void showbuf(char *buf)
{
int i,j=0;
for(i=0;i<MAX_LEN;i++){
if(i%4 ==0)
printf("
%4d: ",j++);
printf("%4d ",buf[i]);
}
printf("
*****************************************************
");
}
/**************************************************************
demo.c
linux driver example for UP-netarm3000 & UP-netarm2410
It can be compiled for x86 PC
author: zou jian-guo <ah_zou@163.com>
date: 2004-8-20
***************************************************************/
//#define CONFIG_DEVFS_FS
#ifndef __KERNEL__
# define __KERNEL__
#endif
#ifndef MODULE
# define MODULE
#endif
#include <linux/config.h>
#include <linux/module.h>
#include <linux/devfs_fs_kernel.h>
#include <linux/init.h>
#include <linux/kernel.h> /* printk() */
#include <linux/slab.h> /* kmalloc() */
#include <linux/fs.h> /* everything... */
#include <linux/errno.h> /* error codes */
#include <linux/types.h> /* size_t */
#include <linux/proc_fs.h>
#include <linux/fcntl.h> /* O_ACCMODE */
#include <linux/poll.h> /* COPY_TO_USER */
#include <asm/system.h> /* cli(), *_flags */
#define DEVICE_NAME "demo"
#define demo_MAJOR 254
#define demo_MINOR 0
static int MAX_BUF_LEN=1024;
static char drv_buf[1024];
static int WRI_LENGTH=0;
/*************************************************************************************/
/*逆序排列缓冲区数据*/
static void do_write()
{
int i;
int len = WRI_LENGTH;
char tmp;
for(i = 0; i < (len>>1); i++,len--){
tmp = drv_buf[len-1];
drv_buf[len-1] = drv_buf[i];
drv_buf[i] = tmp;
}
}
/*************************************************************************************/
static ssize_t demo_write(struct file *filp,const char *buffer, size_t count)
{
if(count > MAX_BUF_LEN)count = MAX_BUF_LEN;
copy_from_user(drv_buf , buffer, count);
WRI_LENGTH = count;
printk("user write data to driver
");
do_write();
return count;
}
/*************************************************************************************/
static ssize_t demo_read(struct file *filp, char *buffer, size_t count, loff_t *ppos)
{
if(count > MAX_BUF_LEN)
count=MAX_BUF_LEN;
copy_to_user(buffer, drv_buf,count);
printk("user read data from driver
");
return count;
}
/*************************************************************************************/
static int demo_ioctl(struct inode *inode, struct file *file,
unsigned int cmd, unsigned long arg)
{
printk("ioctl runing
");
switch(cmd){
case 1:printk("runing command 1
");break;
case 2:printk("runing command 2
");break;
default:
printk("error cmd number
");break;
}
return 0;
}
/*************************************************************************************/
static int demo_open(struct inode *inode, struct file *file)
{
sprintf(drv_buf,"device open sucess!
");
printk("device open sucess!
");
return 0;
}
/*************************************************************************************/
static int demo_release(struct inode *inode, struct file *filp)
{
MOD_DEC_USE_COUNT;
printk("device release
");
return 0;
}
/*************************************************************************************/
static struct file_operations demo_fops = {
owner: THIS_MODULE,
write: demo_write,
read: demo_read,
ioctl: demo_ioctl,
open: demo_open,
release: demo_release,
};
/*************************************************************************************/
#ifdef CONFIG_DEVFS_FS
static devfs_handle_t devfs_demo_dir, devfs_demoraw;
#endif
/*************************************************************************************/
static int __init demo_init(void)
{
#ifdef CONFIG_DEVFS_FS
devfs_demo_dir = devfs_mk_dir(NULL, "demo", NULL);
devfs_demoraw = devfs_register(devfs_demo_dir, "0", DEVFS_FL_DEFAULT,
demo_MAJOR, demo_MINOR, S_IFCHR | S_IRUSR | S_IWUSR,
&demo_fops, NULL);
#else
int result;
SET_MODULE_OWNER(&demo_fops);
result = register_chrdev(demo_MAJOR, "demo", &demo_fops);
if (result < 0) return result;
// if (demo_MAJOR == 0) demo_MAJOR = result; /* dynamic */
#endif
printk(DEVICE_NAME " initialized
");
return 0;
}
/*************************************************************************************/
static void __exit demo_exit(void)
{
unregister_chrdev(demo_MAJOR, "demo");
//kfree(demo_devices);
printk(DEVICE_NAME " unloaded
");
}
/*************************************************************************************/
module_init(demo_init);
module_exit(demo_exit);
三、exp4学习摘要
1.在 Makefile 中有两种编译方法,可以在本机上使用gcc。也可以使用交叉编译器进行编译,但是gcc的编译方法还有后续操作。如下:
如果使用 gcc 编译的话,在测试驱动程序时需要通过下面的命令来建立设备节点,如果使用交叉编译器的话,不需要建立设备节点。
#mknod /dev/demo c 254 0
2.当make出现问题时,可尝试打开makefile文件查看编译程序的所在路径是否正确,是否能够成功链接,若不能,则应该加以修改,这一点在实验五中也会涉及。修改是一个难度较大的操作,也没有学习过。可以多加留意学习。
四、实验体会
通过这次实验,虽然操作不难,但我们觉得注重在于对代码的理解,以及实验遇到问题时的解决。Makefile的路径修改成功,让我们很开心,但是也深深感到了自己对理论知识的掌握还不够,makefile学得还不够精,遇到问题的时候要学会一个个地寻找问题,如果不是这个问题,就排除它,寻找下一个问题原因的可能性。由于多番尝试,最终的成功解决,不仅能使我们尝到成功的喜悦,还能使我们对问题理解和记忆地更加深刻,今后再次遇到此类问题也就不用再担心。同时还帮助同学们解决了这个问题,加深了团队合作的意识。
实验依然是使用上次实验的环境,多次操作使得我们对ARM和REDHAT的搭建更加熟练。
在本次实验中,我负责查找实验指导书中对问题的剖析和预测。重点关注问题的解决方法,还有上网搜查问题的结症所在和解决方案。郑伟则是负责操作和调试。在遇到问题时,我们各司其职,她对自己的操作进行检查,我积极提出问题的可能根源。合作得很高效。
五、搭档博客传送门
http://www.cnblogs.com/zhengwei0712/20135322郑伟