【笔记】NIOS II Interval Timer Core详解
1、说明
本文参考《Embedded Peripherals (ver 9.0, Mar 2009, 4 MB).pdf》,可以看做是实用化的翻译。本文是笔者学习笔记,希望对读者也有帮助。
笔者测试使用环境为quartus 8.1版本。
使用器件为CYCLONE II EP2C8Q208C8N
2、Interval Timer Core概览
该时间计数器是一个为诸如NIOS II等基于Avalon架构的处理器设计的时间计数器。该计数器有如下特点:
(1)32位和64位计数;
(2)具有计数开始、计数停止、和复位计数器功能;
(3)两种技术模式:单次计数、连续计数;
(4)计数周期寄存器;
(5)当计数器计数到0时,可以选择使能或者禁止触发中断(IRQ);
(6)可选作为看门狗,即当计数器从不达到0,产生系统复位;
(7)可选产生周期脉冲,当计数器计数到0时;
(8)可用于32位或者16位处理器中。如16位的NIOS和32位的NIOS II
3、Interval Timer Core功能描述

3.1 Interval Timer Core包含两个用户可见功能
(1)Avalon-MM提供可对6个16位寄存器操作的功能;
(2)可选周期脉冲输出。
所有的寄存器都是16位宽度的,因此可适应于16位或者32位处理器。若该核被配置为一个固定的周期,那么,周期寄存器就不存在。
3.2 Interval Timer Core基本特性

(1)Avalon-MM主设备(如NIOS II处理器)对控制寄存器(control register)的操作可以达到以下目标:
(a)启动或停止计数器;
(b)使能或禁止中断(IRQ);
(c)设置单次计数模式或连续计数模式。
(2)Avalon-MM主设备(如NIOS II处理器)读取状态寄存器(status register)可知晓Interval Timer Core当前的状态。
(3)Avalon-MM主设备(如NIOS II处理器)对周期寄存器(period registers)的写操作可以确定/改变计数周期。
(4)不管何时计数器减计数到0时,都会自动从周期寄存器(period registers)装载计数周期。
(5)处理器可以写管理寄存器(snap registers)请求连贯的计数快照,然后读取snap registers可以得到当前计数值
(6)当计数器减计数到0时,会触发以下动作:
(a)如果中断使能,则产生定时器中断(IRQ);
(b)可选脉冲产生输出一个系统时钟周期;
(c)可选看门狗产生系统复位。
3、在SOPC中安装Interval Timer Core
3.1 计数周期(Timeout Period)
计数周期决定了周期计数器(period registers)的值。当使能可写周期(Writeable period),处理器可以通过写周期计数器(period registers)改变计数器值。或者当禁止可写周期(Writeable period),周期计数器(period registers)不可同过处理器的写操作而改变;此时周期计数器只能是一个不可改变的固定周期计数值。
Interval Timer Core的计数周期是系统时钟周期的整数倍。实际的时钟周期读者可以这样求。
(1)求出系统的时钟。指驱动Interval Timer Core的时钟。一般与NIOS II时钟一致。
(2)将周期计数器里面高16位和低16位的值乘与时钟时期即得计数周期。
3.2 计数大小(Counter Size)
该设定决定了计数器的位宽。可以设定为32位或者64位。32位位宽的计数器包含有2个16位的寄存器;而64位位宽的计数器包含有4个16位宽的寄存器。该设定同样应用至snap单元。
3.3 硬件选项
(1)Simple periodic interrupt—该设定用于只需要一个带有中断(IRQ)的计数器。该方式下,计数周期是固定不可软件更改的,且计数不能停止但中断(IRQ)可禁止。
(2)Full-featured—该配置适用于一个可被处理器更改,可变计数周期,且其开始、停止均可被更改的计数器。
(3)Watchdog—适用于系统需要看门狗的情况。当系统停止响应,该配置能使系统复位。
寄存器(register)设定说明:
(1)Writeable period——当选中此项,则主外设(NIOS II)可通过写周期寄存器(period registers)达到修改计数周期的目的。若未选中此项,则计数周期被确定为(Timeout Period),不可更改;同时周期寄存器(period registers)不再存在。
(2)Readable snapshot——当选中此项,则主外设(NIOS II)可以读取当前计数值。若未选中此项,则主外设只能依靠查询状态寄存器(status register)或者中断(IRQ)标志来得知计数状态;此时(snap registers)并不存在,读取该寄存器会有不确定的数值。
(3)Start/Stop control bits——当选中此项,则主外设(NIOS II)可以通过写控制寄存器(control register)来 启动、停止计数器。若未选中此项,则计数器默认为连续计数模式。值得注意的是,当系统看门狗复位(System reset on timeout (watchdog))是使能状态,则控制寄存器(control register)中的(start)位被置位,而不管Start/Stop 控制位的状态。
信号输出选项:
(1)Timeout pulse (1 clock wide)——当选中该项,则计数器产生一个信号端口(timeout_pulse),该信号端口在计数器减计数至0时产生一个系统时钟周期的高电平。若未选中该项,则计数器不产生该信号端口。
(2)System reset on timeout (watchdog)——当选中该项,则计数器产生一个复位信号端口(resetrequest port)该信号在计数器减计数至0时产生一个系统时钟周期的高电平。若未选中该项,则该信号端口不存在。
3.4 配置计数器为看门狗
若要使用看门狗,则应作如下选择。
(1)presets:选择Watchdog;
(2)Timeout Period修改成所需要的时间
(3)Writeable period禁止;
(4)Readable snapshot禁止;
(5)Start/Stop control bits禁止;
(6)Timeout pulse禁止;
(7)System reset on timeout (watchdog)使能。
复位之后看门狗是禁止的。随后,处理器往控制寄存器(control register)的START位写1,开启看门狗计数。看门狗一旦开启,就不能结束。为了不使系统复位,处理器应该定时地复位计数值。
4、Interval Timer Core软件编写
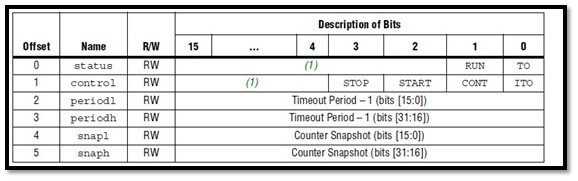
4.1 寄存器映射
32位计数器
64位计数器

状态寄存器(status Register Bits)
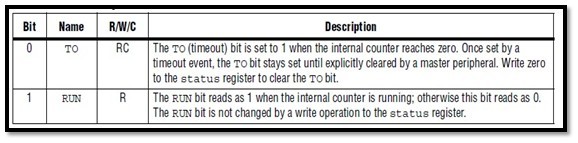
TO——当计数器减计数到0时,置1。一旦置1,则必须由主外设(NIOS II)清0;
RUN——当计数器在计数运行时,RUN=1;否则RUN=0。写RUN对值无影响。
控制寄存器(control register)

ITO——当ITO=1时,计数器会产生中断。反之则反。
CONT——若COUNT=1则计数器计数到0连续计数,知道STOP=1;若COUNT=0则计数器计数到0时,停止计数。
START——写1到START则使计数器开始计数。当计数器正在计数运行,则写START无效。
STOP——写1到STOP则使计数器停止计数。若计数器已经停止计数,则写STOP无效。当SOPC配置为 Start/Stop control bits为关闭,则写STOP无效。
4.2 中断(IRQ)
当计数器减计数到0时并且控制寄存器(congtrol register)ITO位被置1,则可产生定时器中断。处理中断应用一下两种方式之一:
(1)清除状态寄存器(status register)的TO位;
(2)清除控制寄存器(congtrol register)ITO位,禁止中断。
否则会产生不确定结果。
5、实例程序
 /*************************定时器中断注册初始化函数*****************************/
/*************************定时器中断注册初始化函数*****************************/
 void InitInterrupt(){
void InitInterrupt(){ //----------------------------定时器中断,系统时钟66.7MHz--------------------------// alt_irq_register(TIMER_IRQ,NULL,Timer_interrupts); //注册中断函数 IOWR_ALTERA_AVALON_TIMER_PERIODH(TIMER_BASE, 0x000A); IOWR_ALTERA_AVALON_TIMER_PERIODL(TIMER_BASE, 0x2C2A);//修改定时时间10ms IOWR_ALTERA_AVALON_TIMER_CONTROL(TIMER_BASE, 7); //启动定时器允许中断,连续计数
//----------------------------定时器中断,系统时钟66.7MHz--------------------------// alt_irq_register(TIMER_IRQ,NULL,Timer_interrupts); //注册中断函数 IOWR_ALTERA_AVALON_TIMER_PERIODH(TIMER_BASE, 0x000A); IOWR_ALTERA_AVALON_TIMER_PERIODL(TIMER_BASE, 0x2C2A);//修改定时时间10ms IOWR_ALTERA_AVALON_TIMER_CONTROL(TIMER_BASE, 7); //启动定时器允许中断,连续计数 }/*************************定时器中断服务函数*****************************/void Timer_interrupts(void* context, alt_u32 id){
}/*************************定时器中断服务函数*****************************/void Timer_interrupts(void* context, alt_u32 id){ /***************************服务代码**************/
/***************************服务代码**************/
 /**********************退出时清状态寄存器***********/ IOWR_ALTERA_AVALON_TIMER_STATUS(TIMER_BASE, 0); //清状态寄存器 }
/**********************退出时清状态寄存器***********/ IOWR_ALTERA_AVALON_TIMER_STATUS(TIMER_BASE, 0); //清状态寄存器 }