目标检测任务中由于我们事先不知道需要检测哪个类别,因此第一张图的桌子、瓶子、餐具都是一个个候选目标,而餐具包含在桌子这个目标内,勺子又包含在碗内。这张图展示了目标检测的层级关系以及尺度关系,那我们如何去获得这些可能目标的位置呢。
在selective search算法之前,在图片上使用穷举法或者滑动窗口选出所有物体可能出现的区域框,就是在原始图片上进行不同尺度不同大小的滑窗,获取每个可能的位置。而这样做的缺点也显而易见,复杂度太高,产生了很多的冗余候选区域,而且由于不可能每个尺度都兼顾到,因此得到的目标位置也不可能那么准。

selective search算法不使用暴力方法,而是用候选区域方法(region proposal method)创建目标检测的感兴趣区域(ROI)。在选择性搜索(selective search,SS)中,我们可以先利用基于图的图像分割的方法得到小尺度的区域,然后一次次合并得到大的尺寸。考虑所有特征,例如颜色、纹理、大小等,同时照顾下计算复杂度。
在介绍Selective Search之前,先说明一下需要考虑的问题:
- 适应不同尺度(Capture All Scales):穷举搜索通过改变窗口大小来适应物体的不同尺度,选择搜索同样无法避免这个问题。算法采用图像分割以及使用一种层次算法有效地解决了这个问题
- 多样化(Diversification):单一的策略无法应对多种类别的图像,使用颜色、纹理、大小等多种策略对分割好的区域进行合并
- 速度快
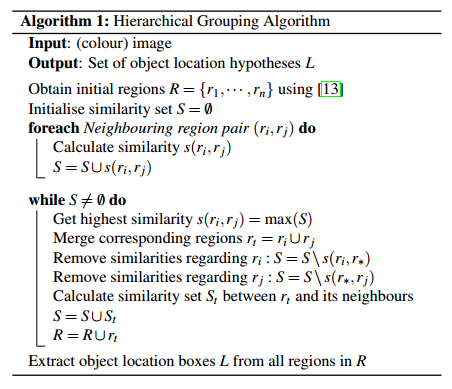
输入:一张图片
输出:候选的目标位置集合
算法:
利用切分方法得到候选的区域集合R = {r1,r2,…,rn}
初始化相似集合S = ϕ
foreach 遍历邻居区域对 (ri,rj) do
计算相似度s(ri,rj)
S = S ∪ s(ri,rj)
while S not=ϕ do
从s中得到最大的相似度s(ri,rj)=max(S)
合并对应的区域rt = ri ∪ rj
移除ri对应的所有相似度:S = Ss(ri,r*)
移除rj对应的所有相似度:S = Ss(r*,rj)
计算rt对应的相似度集合St
S = S ∪ St
R = R ∪ rt
L = R中所有区域对应的边框
-------算法解读参考 墨麟非攻
首先通过基于图的图像分割方法初始化原始区域,就是将图像分割成很多很多的小块,使用贪心策略,计算每两个相邻区域的相似度,然后每次合并最相似的两块,直至最终只剩下一块完整的图片。然后这其中每次产生的图像块包括合并的图像块我们都保存下来,这样就得到图像的分层表示。
保持多样性的策略
区域合并采用了多样性的策略,如果简单采用一种策略很容易错误合并不相似的区域,比如只考虑纹理时,不同颜色的区域很容易被误合并。选择性搜索采用三种多样性策略来增加候选区域以保证召回:
-
多种颜色空间,考虑RGB、灰度、HSV及其变种
- 多种相似度度量标准,既考虑颜色相似度,又考虑纹理、大小、重叠情况等
- 通过改变阈值初始化原始区域,阈值越大,分割的区域越少
a.颜色空间转换
通过色彩空间转换,将原始色彩空间转换到多达八种色彩空间。也是为了考虑场景以及光照条件等,主要应用于图像分割算法中原始区域的生成(两个像素点的相似度计算时,计算不同颜色空间下的两点距离)。
主要使用的颜色空间有:
1)RGB
2)灰度I
3)Lab
4)rgI(归一化的rg通道加上灰度)
5)HSV
6)rgb(归一化的RGB)
7)C
8)H(HSV通道的H)
b.区域相似度计算
我们在计算多种相似度的时候,都是把单一相似度的值归一化到[0, 1]之间,1表示两个区域之间相似度最大
-
颜色相似度
-
纹理相似度
-
有限合并小的区域
-
区域的合适度距离
- 合并上面四种相似度
给区域打分
通过上述步骤,我们可以得到很多区域,但是并不是每个区域作为目标的可能性都是相同的,我们要进行筛选。
给予最先合并的图片块较大的权重,比如最后一块完整图像权重为1,倒数第二次合并的区域权重为2,以此类推。但是当我们策略很多,多样性很多的时候,权重就会有太多的重合,这样排序就不太方便。我们可以给他们乘以一个随机数,然后对于相同的区域多次出现的也叠加下权重,毕竟多个方法都说你是目标,也是有理由的嘛。这样我们就得到所有区域的目标分数,也就可以根据自己的需要选择多少个区域了。
选择性搜索性能评估
自然地,通过算法计算得到的包含物体的Bounding Boxes与真实情况(ground truth)的窗口重叠越多,那么算法性能就越好。这是使用的指标是平均最高重叠率ABO(Average Best Overlap)。对于每个固定的类别c,每个真实情况(ground truth)表示为$g_{i}^{c} in G^{c}$,令计算得到的位置假设L中的每个值$l_{j}$,那么 ABO的公式表达为:
$mathrm{ABO}=frac{1}{left|G^{c} ight|} sum_{g_{i}^{c} in G^{c}} max _{l_{j} in L}$ Overlap $left(g_{i}^{c}, l_{j} ight)$
上面结果给出的是一个类别的ABO,对于所有类别下的性能评价,很自然就是使用所有类别的ABO的平均值MABO(Mean Average Best Overlap)来评价。
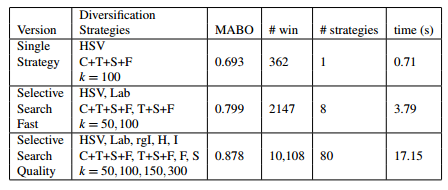
a.单一策略评估
我们可以通过改变多样性策略中的任何一种,评估选择性搜索的MABO性能指标。采取的策略如下:
- 使用RGB色彩空间
- 采用四中相似度计算的组合方式
- 设置图像分割的阈值k=50
b.多样性策略组合
我们使用贪婪搜索算法,把单一策略进行组合,会获得较高的MABO,但是也会造成计算成本的增加。

上图中绿色边框为对象的标记边框,红色边框为我们使用'Quality' Selective Search算法获得的Overlap最高的候选框。可以看到我们这个候选框和真实标记非常接近。
参考代码
我们可以通过pip安装Selective Search包
pip install selectivesearch
源码:https://github.com/AlpacaDB/selectivesearch
Reference
1.https://www.cnblogs.com/zyly/p/9259392.html
2.图像分割—基于图的图像分割(Graph-Based Image Segmentation)(附代码)
4.https://github.com/AlpacaDB/selectivesearch(代码)