转发:通俗易懂 深入浅出(๑•̀ㅂ•́)و✧
Cesium中的相机—WebGL基础
Cesium是基于Html5 WebGL技术在浏览器中显示三维物体,本文阐述一下WebGL显示三维物体的基本概念。
需要说明是,在三维场景中,相机(Cesium中为Camera)指的是观察者,即用相机模拟人眼观测,因此在以后各篇章中,为避免读者引起疑惑,以下名词等效:
相机=摄像机=人眼=观察者
WebGL 三维场景渲染原理
WebGL是基于GLSL ES(着色器语言)的,并以字符串的形式在JavaScript中编写的。WebGL中有两种着色器:
- 顶点着色器(Vertex shader):顶点着色器用来描述顶点特性(如位置、颜色)的程序。
Vertex(顶点) 是指二维或三维空间中的一个点。 - 片元着色器(Fragment shader):进行逐片元处理过程(如光照、纹理贴图)的程序。片元(Fragment) 是一个WebGL属于,你可以将其理解为像素(图像的单元)。
简单的说,在三维场景中,仅仅用线条和颜色把图形画出来是远远不够的。你必须考虑,比如,光线照上去之后,或者观察者的视角发生变化,对场景会有些什么影响。着色器可以高度灵活地完成这些工作,提供各种渲染效果。这就是当今计算器制作出的三维场景如此逼真和令人震撼的原因。
当然,在Cesium中,我们不需要接触到底层的东西,Cesium已经全部通过函数的方式为我们包装好相应的功能,使用时直接调用相关API即可。
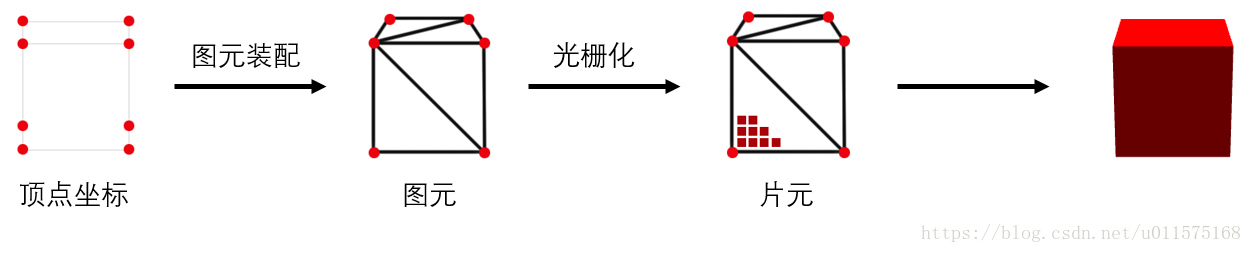
简单的说,任何一个三维模型,都是一系列的点组成,再由点组成一系列的三角形,而在WebGL中也只能通过绘制三种图形(点、线段和三角形)来绘制整个模型。
WebGL绘制过程包括以下三步:
- 获取顶点坐标
- 图元装配(即画出一个个三角形)
- 光栅化(生成片元,即一个个像素点)
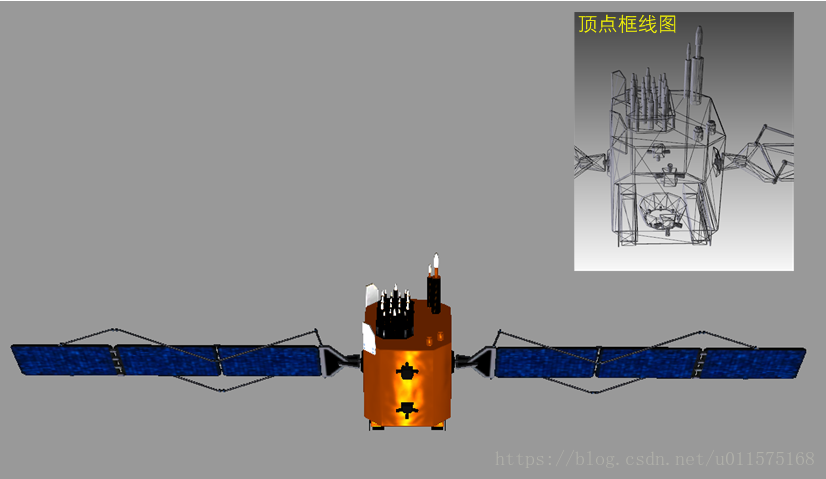
尽管模型有着成千上万个顶点,但是在渲染过程中,是一个个顶点顺序处理的,也就是说所有顶点的处理步骤是一样的,因此,在各种文档中,阐述坐标转换时,仅仅以一个点为例,读者需要清楚这一点。
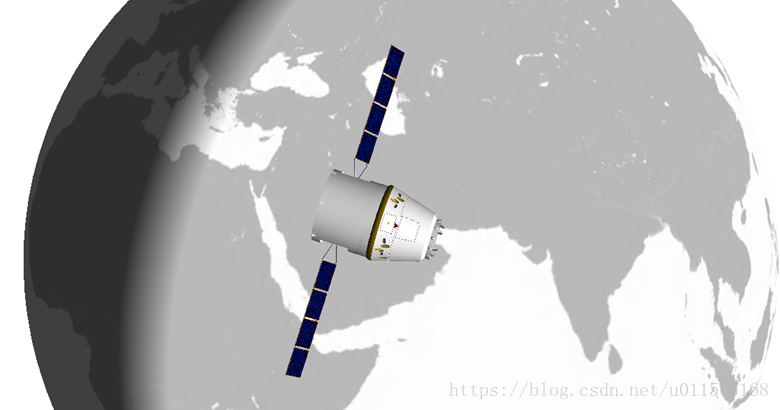
下图为某卫星的渲染图和顶点框线图。
模型矩阵、视图矩阵、投影矩阵
计算机屏幕显示一个三维物体时,实际上是把三维空间中的模型转换为屏幕上的二维的点坐标,本质上是一个投影变换,即:将三维空间中的物体映射到二维屏幕上,基本的流程如下:
-
在一个世界坐标系中建立场景,场景中所有的对象(即各种三维模型,如地球、飞船、地面站)的顶点坐标均要在世界坐标系中表示。
但是,通常我们建立模型的时候,模型所有顶点的坐标都是相对模型本体坐标系的,根本不知道世界坐标系,怎么办?
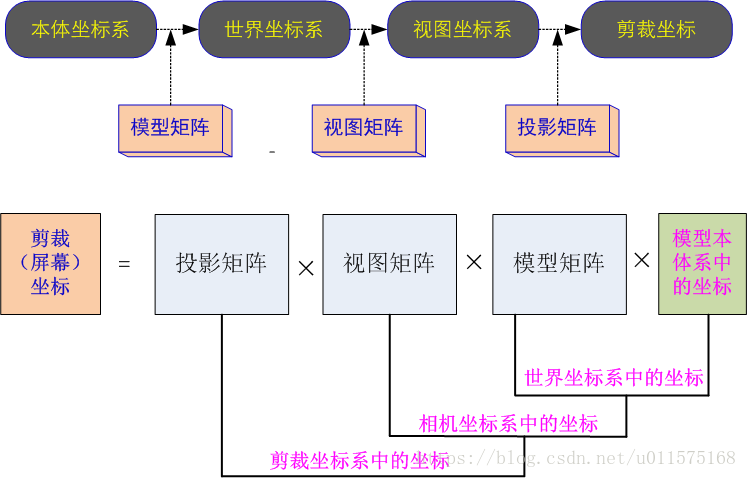
还有,如果模型一直在运动怎么办?比如卫星绕地球运行。没有关系,在WebGL中,缓存中存储的模型顶点的坐标就是原始坐标,通常就是模型本体坐标系下的坐标。在每一帧渲染时,需要根据模型在世界坐标系中的位置和姿态,将模型的所有顶点坐标转换为世界坐标系中的坐标,这个转换过程可用一4×4的矩阵表示,称为模型矩阵(Model Matrix。
-
有了世界坐标系中的所有顶点坐标还不够,还需要知道相机的位置和观察方位。相机模拟的是人眼对世界的观测,相机的位置不同、方向不同,所观测到的同一个世界的场景也不同,就像我们平时往前看和往后看的景色不一样,但是我们所处的世界都是同一个世界。
因此,需要根据相机的位置和观察方位,将世界坐标系中的所有顶点坐标转换为视图坐标系 (也称相机坐标系) 中的坐标,这个转换过程也可用一4×4的矩阵表示,称为视图矩阵(View Matrix)
-
在相机坐标中,所有模型的顶点坐标仍是三维的(具有x,y,z三个分量),而显示器是二维的(x,y两个分量),因此还需将三维的顶点坐标投影到二维平面上去(也称剪裁坐标)。对于人眼观测世界来说,远处的东西显得比近处的小,这种投影方式称之为透视投影,仍可用一4×4的矩阵表示,称为**(透视)投影矩阵(Perspective projection Matrix)**
就是通常所说的模型视图投影矩阵(MVP),流程图见下。
其中,模型矩阵、视图矩阵、投影矩阵均为4×4的矩阵。
Cesium中的世界坐标系与相机坐标系
在Cesium中,Camera对象是处理相机的位置和观察方位的,显然,是属于上述三个矩阵中的视图矩阵。
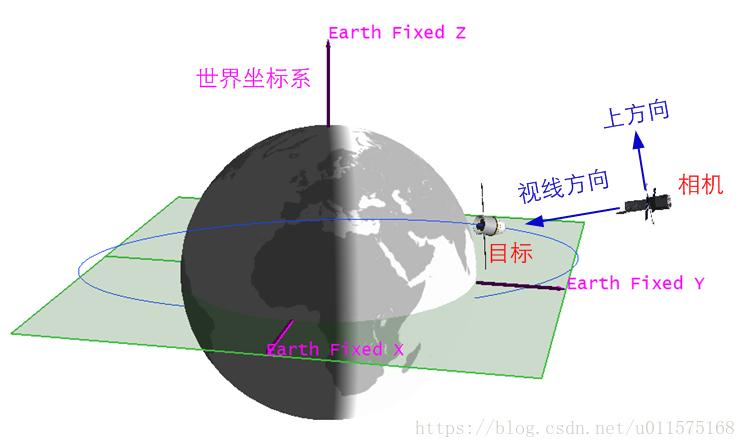
Cesium中,世界坐标系就是地球的WGS84系,也即地球固连坐标系(Earth Fiexed),在此坐标中定义相机的位置与观测方位。
下图中,目标为一运动的飞船,其在WGS84系中的位置是时刻变化的。相机位置、视线方向和相机的上方向均在WGS84系下表达。
根据相机的位置和观察方位,可给出相机观测到的场景,见下示意图。
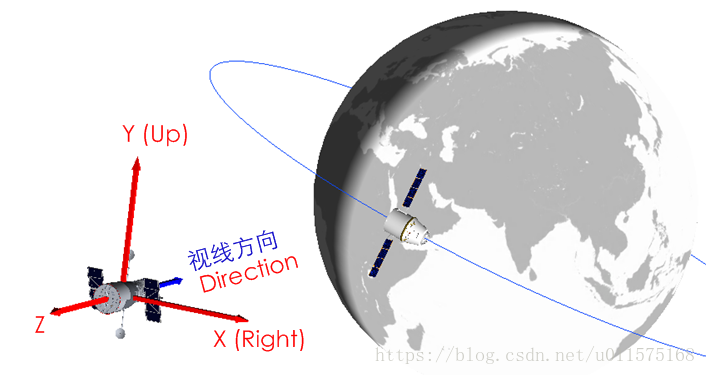
Cesium中的相机坐标系见下图(使用Hubble望远镜示意相机),在Camera对象中,通常用三个矢量来表示:Up、Right和Direction,这三个方向确定了相机的观测方位。Up、Right、Direction与相机坐标系(视图坐标系)XYZ三轴的关系为:
X=Right
Y=Up
Z=-Direction
Cesium中,Camera对象中已经包含很多常见设置函数。掌握视图矩阵的概念,即可熟练对Cesium中的相机(Camera)的各项参数进行设置。后续我们会逐渐从源代码分析Camera中各种函数所实现的过程及相应的功能。
综上所述,模型、视图和投影矩阵是三维计算机图形学的基石。关于这三个矩阵的知识虽然不是我们学习Cesium的必须,但是至少能够帮助我们更好地了解那些库函数在做些什么,或者自己直接操作矩阵对象。
参考资料
如果对WebGL基础想具体了解的,可参考以下文章:
- WebGL编程指南
老外写的一本WebGL入门书籍,从入门到逐渐深入讲解WebGL的各种原理,如果对WebGL原理有兴趣的,强烈推荐。写的浅显易懂,且有代码一步步示范。 - 图解WebGL&Three.js工作原理
- webgl笔记-1.模型视图矩阵和投影矩阵
- webgl开发第一道坎——矩阵与坐标变换