硬件连接
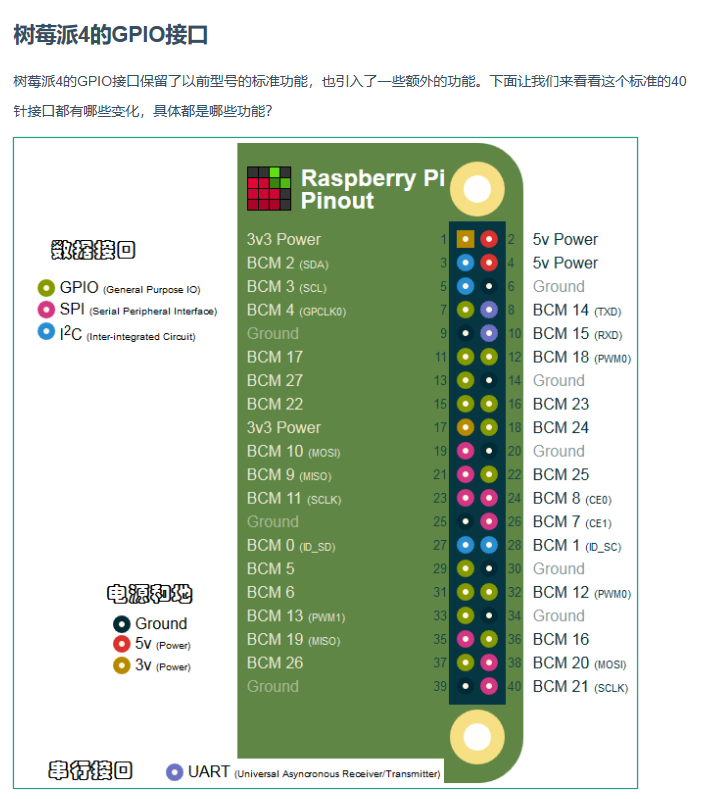
将引脚连接,mpu6050的5v,GND,SDA,SCL分别接引脚4,6,3,5
然后
1 sudo vim /etc/modules 2 3 //在文件末尾添加 4 5 i2c-bcm2708 6 i2c-dev
sudo vim /etc/modprobe.d/raspi-blacklist.conf //添加 blacklist spi-bcm2708 blacklist i2c-bcm2708
启用GPIO
如果是raspbian系统则可以通过一下命令来设置,如果是ubuntu或者其他则需要去百度一下怎样设置
sudo raspi-config
下载工具
sudo apt-get install i2c-tools
查找设备
下面的1也可能是0
pi@raspberrypi:~ $ sudo i2cdetect -y 1 0 1 2 3 4 5 6 7 8 9 a b c d e f 00: 03 -- -- -- -- -- -- -- -- -- -- -- -- 10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- 60: -- -- -- -- -- -- -- -- 68 -- -- -- -- -- -- -- 70: -- -- -- -- -- -- -- --
测试设备
sudo i2cget -y 1 0x68 0x75
pi@raspberrypi:~ $ sudo i2cget -y 1 0x68 0x75 0x68
这里的1(或者0)于上面一样
这篇文章中的代码可以用来测试驱动mpu6050的环境是否配置成功
https://blog.csdn.net/lyj19960106/article/details/77719601
安装驱动
sudo mkdir -p /usr/share/arduino/libraries cd /usr/share/arduino/libraries sudo git clone https://github.com/chrisspen/i2cdevlib.git
安装bcm2835
1 cd /tmp 2 wget http://www.airspayce.com/mikem/bcm2835/bcm2835-1.68.tar.gz 3 tar zxvf bcm2835-1.68.tar.gz 4 cd bcm2835-1.68 5 ./configure 6 make 7 sudo make check 8 sudo make install
在工作空间内下载代码并编译
git clone https://github.com/chrisspen/ros_mpu6050_node.git
然后运行
sudo bash -c "source /home/pi/catkin_ws/devel/setup.bash;roslaunch ros_mpu6050_node mpu6050.launch"
如果不出意外就会看到DMP ready!
观察的数据
rostopic echo /imu/data
sudo bash -c "source /home/pi/ros_catkin_ws/devel_isolated/setup.bash;roslaunch ros_mpu6050_node mpu6050.launch"