如何表示旋转?三种方法
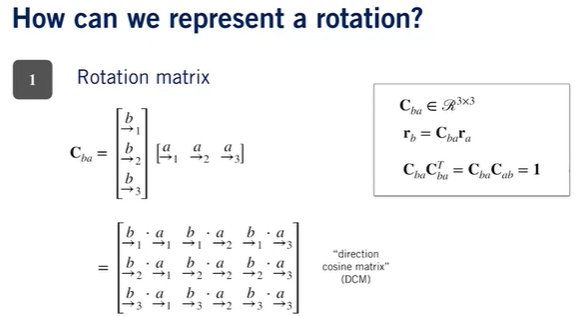
1. rotation matrix
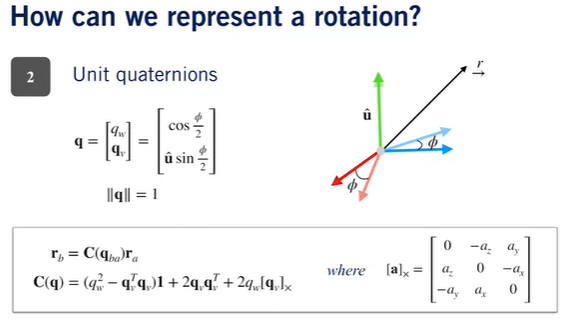
2. unit quaternions 四元数
3. Euler angles

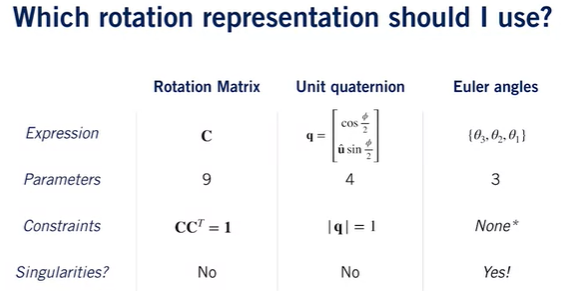
4. compare
坐标系
ECIF - Earth-Centered Inertial Frame, 用于太空空间,如卫星
ECEF - Earth-Centered Eearth-Fixed Frame, 用于太空空间,如卫星
NED - North East Down, NEU - North East Up, 用于导航Navigation
Sensor Frame
IMU - Inertial Measurement Unit
包含了两个组件,加速度计 和 陀螺仪。 IMU的例子有基于手机的计步,还有用于增强现实设备
GNSS
GPS 是最常用的一种,还有我国的北斗