一、局部地图构建简介
为什么叫“局部”地图构建,我的理解是这个线程的主要任务是像地图中插入关键帧(包括地图点等信息),以及需要进行LocalBA优化一个局部地图,这是相对于回环检测时进行的全局优化来说的,所以称为局部地图构建。而局部地图构建的主要任务就是上面说的,等待跟踪过程判断是否应该插入一个新的关键帧,并把关键帧插入到地图中,并对局部地图(跟踪过程中有一个局部地图跟踪)进行BA优化。具体细节包括三角化3D点,3D点的融合匹配,关键帧插入等。
二、局部地图构建逻辑分析
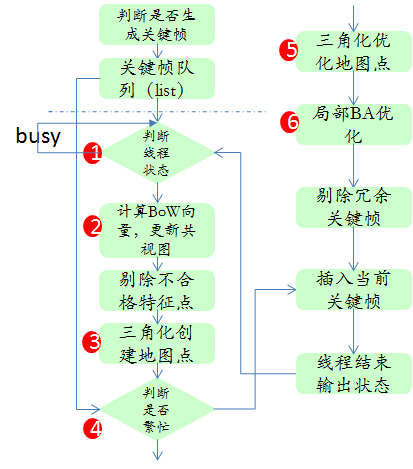
根据跟踪过程中的关键帧判定函数判断是否插入关键帧,生成一个关键帧队列,这个队列中都是待插入地图的关键帧;首先判断该线程是否正在执行插入关键帧的操作(上一个关键帧插入没有完成),然后计算当前关键帧的BoW向量、共视关系等信息并插入地图;每个关键帧都附带有特征点和描述符等信息(跟踪过程中使用到的),但是并不是所有的特征点都会成为3D地图点,因此需要剔除一些不合格的点,然后通过三角化创建地图点;接下来判断关键帧队列中是否仍有关键帧,如果没有(线程不是很忙)则进行3D点融合、LocalBA、冗余关键帧剔除等优化操作,而如果线程比较忙,则直接执行插入关键帧到闭环检测队列的操作(每一个关键帧都会判断是否遇到闭环);最后更改线程状态。
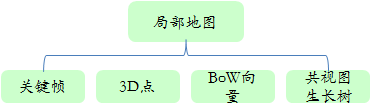
局部建图线程一开始看比较乱,但是只要弄清楚了地图中包含哪些信息(如上图所示)逻辑上还是比较清楚的,就是把当前关键帧(包括MapPoints,Features等信息)插入到地图中,并更新一下这个关键帧和其他关键帧之间的共视关系以及关键帧和地图点的观察关系等,但是有些地图点或关键帧经过判断之后显得多余或不合适(如这个关键帧的点几乎都能在其他关键帧上找到,或者这个关键帧上的点在其他关键帧上几乎找不到),就需要删除它,还有的3D点可能由于三角化误差的关系,本来是一个点,被三角化成了两个距离比较近的点,就需要进行融合等。
局部地图和前面的跟踪和后面的回环检测都有联系,关键帧是通过跟踪线程产生的,而局部地图进行LocalBA的条件是没有发现回环以及关键帧队列为空。这里地图包含的要素对保存和加载地图也是很有帮助的。
三、总结
相比跟踪过程,逻辑上比较简化,但是代码并不简单。分析关于局部地图的更新量对于地图的保存与加载也是很有帮助的,后面还会给出ORB-SLAM的地图保存与加载的分析。