第6章 Java并发容器和框架
6.1 ConcurrentHashMap的实现原理与使用
ConcurrentHashMap是线程安全且高效的HashMap。
6.1.1 为什么要使用ConcurrentHashMap
在并发编程中使用HashMap可能导致程序死循环,而使用线程安全的HashTable效率又非常低,基于以上2个原因,便有了ConcurrentHashMap的出现。
(1)线程不安全的HashMap
再多线程环境下,使用HashMap进行put操作时会引起死循环,导致CPU利用率接近100%,原因是多线程会导致HashMap的Entry链表形成环形数据结构,一旦形成环形数据结构,Entry的next节点永远不为空,就会产生死循环获取Entry。
(2)效率低下的HashTable
HashTable容器使用synchronized来保证线程安全,但在线程竞争激烈的情况下HashTable的效率非常低下。因为当一个线程访问HashTable的同步方法,其他线程也访问HashTable的同步方法时,会进入阻塞或轮询状态。
(3)ConcurrentHashMap的锁分段技术可优先提升并发访问效率
首先将数据分成一段一段地存储,然后给每一段数据配一把锁,当一个线程占用锁访问其中一个段数据的时候,其他段的数据也能被其他线程访问。
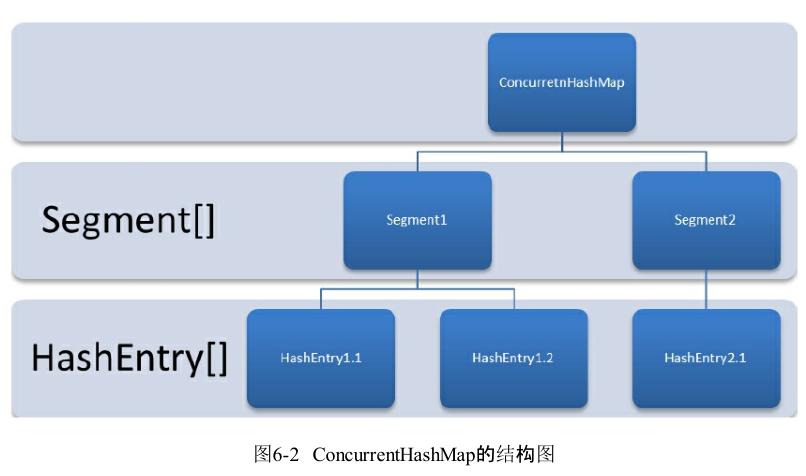
6.1.2 ConcurrentHashMap的结构
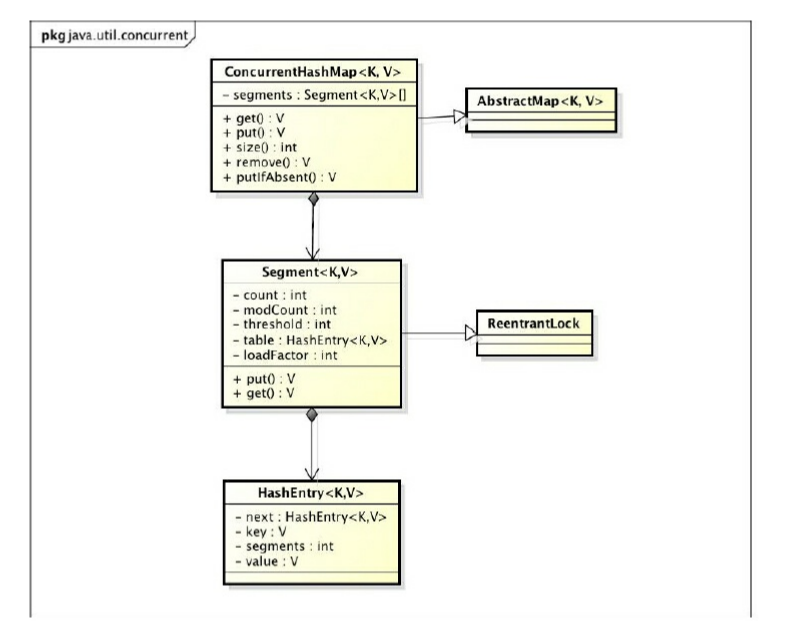
ConcurrentHashMap是由Segment数组结构和HashEntry数组结构组成。Segment是一种可重入锁(ReentrantLock),在ConcurrentHashMap里扮演锁的角色;HashEntry则用于存储键值对数据。一个ConcurrentHashMap里包含一个Segment数组。Segment的结构和HashMap类似,是一种数组和链表结构。一个Segment里包含一个HashEntry数组,每个HashEntry是一个链表结构的元素,每个Segment守护着一个HashEntry数组里的元素,当对HashEntry数组的数据进行修改时,必须首先获得与它对应的Segment锁。
6.1.3 ConcurrentHashMap的初始化
ConcurrentHashMap初始化方法是通过initialCapacity、loadFactor、concurrencyLevel几个参数来初始化segments数组、段偏移量segmentShift,段掩码segmentMask和每个segment里的HashEntry数组 。
1、初始化segments数组

由上面的代码可知segments数组的长度ssize通过concurrencyLevel计算得出。为了能通过按位与的哈希算法来定位segments数组的索引,必须保证segments数组的长度是2的N次方(power-of-two size),所以必须计算出一个是大于或等于concurrencyLevel的最小的2的N次方值来作为segments数组的长度。假如concurrencyLevel等于14,15或16,ssize都会等于16,即容器里锁的个数也是16。
2、初始化segmentShift和segmentMask:
这两个全局变量在定位segment时的哈希算法里需要使用,sshift等于ssize从1向左移位的次数,在默认情况下concurrencyLevel等于16,1需要向左移位移动4次,所以sshift等于4。segmentShift用于定位参与hash运算的位数,segmentShift等于32减sshift,所以等于28,这里之所以用32是因为ConcurrentHashMap里的hash()方法输出的最大数是32位的。segmentMask是哈希运算的掩码,等于ssize减1,即15,掩码的二进制各个位的值都是1。因为ssize的最大长度是65536,所以segmentShift最大值是16,segmentMask最大值是65535,对应的二进制是16位,每个位都是1。
3、初始化每个segment:
输入参数initialCapacity是ConcurrentHashMap的初始化容量,loadfactor是每个segment的负载因子,在构造方法里需要通过这两个参数来初始化数组中的每个segment。
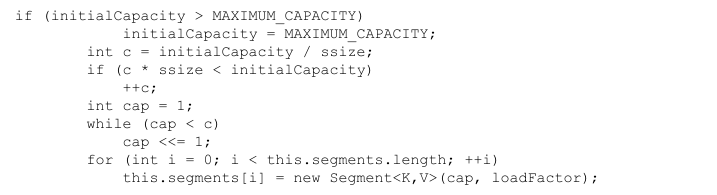
上面代码中的变量cap就是segment里HashEntry数组的长度,它等于initialCapacity除以ssize的倍数c,如果c大于1,就会取大于等于c的2的N次方值,所以cap不是1,就是2的N次方。segment的容量threshold=(int)cap*loadFactor,默认情况下initialCapacity等于16,loadfactor等于0.75,通过运算cap等于1,threshold等于零。
【备注】:参数concurrencyLevel是用户估计的并发级别,就是说你觉得最多有多少线程共同修改这个map,根据这个来确定Segment数组的大小,默认为16。
6.1.4 定位Segment
既然ConcurrentHashMap使用分段锁Segment来保护不同段的数据,那么在插入和获取元素的时候,必须先通过哈希算法定位到Segment。可以看到ConcurrentHashMap会首先使用Wang/Jenkins hash的变种算法对元素的hashCode进行一次再哈希。
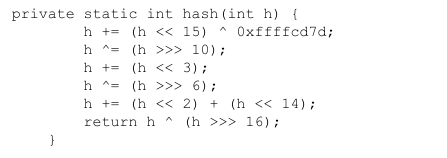
之所以进行再哈希,其目的是为了减少哈希冲突,使元素能够均匀的分布在不同的Segment上,从而提高容器的存取效率。假如哈希的质量差到极点,那么所有的元素都在一个Segment中,不仅存取元素缓慢,分段锁也会失去意义。
6.1.5 ConcurrentHashMap的操作
本节介绍ConcurrentHashMap的3种操作——get、put、size
1、get操作
Segment的get操作实现非常简单和高效。先经过一次再散列,然后使用这个散列值通过散列运算定位到Segment,再通过散列算法定位到元素。

get操作的高效之处在于整个get过程不需要加锁,除非读到值为空才会加锁重读。因为用于统计当前Segment大小的count字段和用于存储值得HashEntry的value都被定义成volatile变量,而在get操作里只需要读不需要写共享变量count和value。在定位元素的代码里我们可以发现,定位HashEntry和定位Segment的散列算法虽然一样,都与数组的长度减去1再相“与”,但是相“与”的值不一样,定位Segment使用的是元素的hashcode通过再散列后得到的值得高位,而定位HashEntry直接使用的是再散列后的值。其目的是避免两次散列后的值一样,虽然元素在Segment里散列开了,但是却没有在HashEntry里散列开。
2、put操作
由于put方法里需要对共享变量进行写入操作,所以为了线程安全,在操作共享变量时必须加锁。put方法首先定位到Segment,然后再Segment里进行插入操作。插入操作需要经历两个步骤,第一步在插入元素之前判断Segment里的HashEntry数组是否需要扩容,如果HashEntry数组超过容量,则创建一个容量是原来容量两倍的数组,然后将原数组里的元素进行再散列后插入到新的数组里。为了高效,ConcurrentHashMap只针对某个Segment进行扩容而不是整个容器。第二步定位添加元素的位置,然后将其放在HashEntry数组里。
3、size操作
如果要统计整个ConcurrentHashMap里元素的大小,就必须统计所有Segment里元素的大小后求和。Segment里的全局变量count虽然被定义为volatile变量,但如果在累加前使用的count发生了变化,那么统计结果就不准了。最安全的做法是在统计size时,锁住所有的Segment的put,remove,clean方法,但显然很低效。
ConcurrentHashMap统计size的方法是,尝试2次不锁住Segment的方式来统计各个Segment大小,如果在统计过程中,容器的count发生了变化,则再采用加锁的方式来统计所有Segment的大小。ConcurrentHashMap中modCount变量在调用put,remove和clean方法素前加1,从而来记录容器大小是否发生变化。
6.2 ConcurrentLinkedQueue
在并发编程中,如果要实现一个线程安全的队列,则有两种方式:
(1) 使用阻塞算法,入队和出队使用锁来控制。
(2) 非阻塞算法:即循环CAS方式来实现。
ConcurrentLinkedQueue就是使用非阻塞方式实现的基于链接节点的无界线程安全队列。它采用先进先出的规则对节点进行排序。新添加的元素会被添加到对尾,获取元素时,它会返回头部的元素。
6.2.1 ConcurrentLinkedQueue的结构
ConcurrentLinkedQueue的类图如下:

ConcurrentLinkedQueue由head节点和tail节点组成,每个节点(Node)由节点元素(item)和指向下一个节点(next)的引用组成,由此组成一张链表结构的队列。默认情况下head节点存储的元素为空,tail节点等于head节点。
6.2.2 入队列
1、入队列的过程
入队列就是将入队节点添加到队列的尾部。

入队主要做两件事情:
1、入队节点设置为当前队列尾节点的下一个节点。
2、更新tail节点,如果tail节点的next节点不为空,则将入队节点设置为tail节点,如果tail节点的next为空,则将入队节点设置为tail节点的next节点(注意:此时并未更新tail节点为尾节点)。所以,tail节点并不总是尾节点。
如果在单线程中执行没有任何问题,但如果在多线程中可能出现插队的情况。如果有一个线程正在入队,那么首先获取尾节点,然后设置尾节点的下一个节点为入队节点,但这是如果另一个线程插队,则队列尾节点发生变化,当前线程需要暂停入队操作,重新获取新的尾节点。所以使用CAS算法来将入队节点设置为尾节点的next节点:
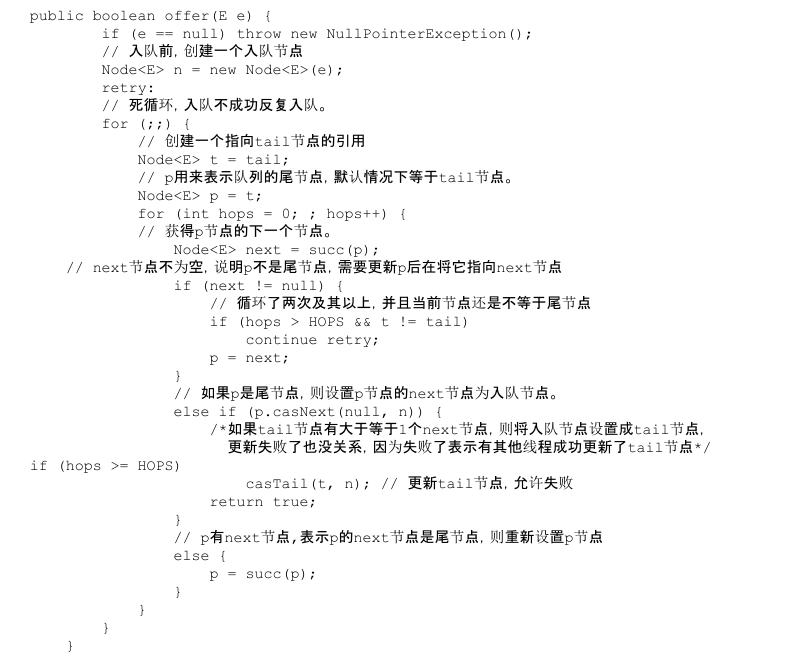
2、定位尾节点
tail节点并不总是尾结点,所以每次入队都必须先通过tail节点来找到尾结点。尾节点可能是tail节点或tail节点的next节点。
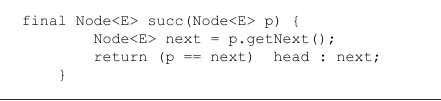
如果队列尾节点p与p的next节点都为空,则表示这个队列刚初始化,正准备添加节点,所以需要返回head节点。
3、设置入队节点为尾节点
p.casNext(null,n)方法用于将入队节点设置为当前队列尾节点的next节点,如果p是null,表示p是当前队列的尾节点,如果不为null,表示有其他线程更新了尾节点,则需要重新获取当前队列的尾节点。
4、HOPS的设计意图
为什么不保证tail节点总是尾节点 ?
如果保证tail节点总是尾节点的话,那么入队操作直接通过tail节点定位到尾节点,然后把尾节点next节点更新为新的入队节点,随后更新tail节点为新的尾节点不就可以了吗?但这么做的有一个很明显的缺陷:每次都需要使用循环CAS更新tail节点为尾节点。一定程度上降低了入队的效率。所以在ConcurrentLinkedQueue入队时,并不是每次更新tail节点为尾节点,只有当tail节点和尾节点距离大于等于常量HOPS的值(默认为1)时才会更新tail节点。tail节点与尾节点距离越长,使用CAS更新tail节点次数越少,但每次入队时通过tail节点定位尾节点的时间就越长。但这样仍然可以提升入队效率,因为本质上来看通过增加volatile变量的读操作来减少volatile变量的写操作,而对volatile变量写操作的开销远远大于读操作。

【备注】:入队方法永远返回true,所以不要通过返回值判断入队是否成功。
6.2.3 出队列
出队列就是从队列里返回一个节点元素,并清空该节点对元素的引用。
以下为从队列获取4个元素的快照图:
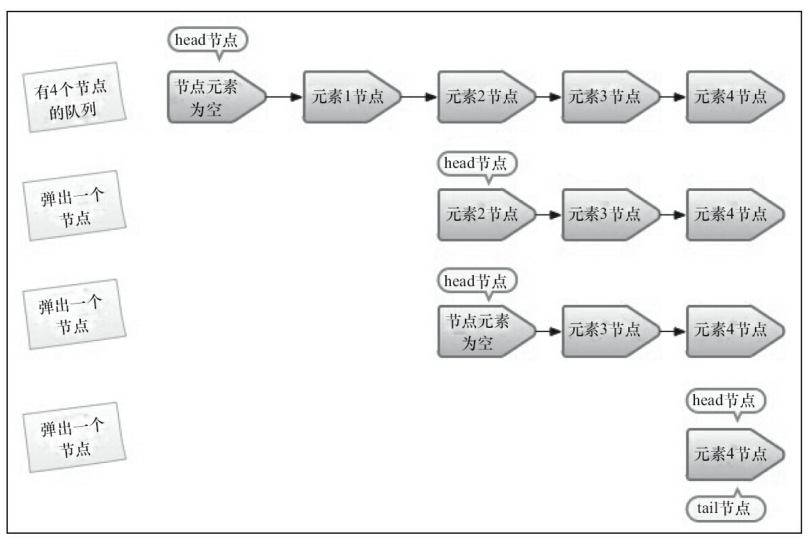
从上图可以看出,并不是每次出队列都需要更新head节点为首节点,当head节点为空时,更新head节点为首节点,如果head节点不为空,则直接弹出head节点里的元素,并不会更新head节点为新的首节点。之所以这样设计,同样是为了减少CAS更新head节点从而提高出队效率。

首先获取首节点,然后判断首节点是否为空,如果为空,则证明另一个线程已经进行了一次出队操作,需要获取新首节点即原首节点的next节点。如果不为空则使用CAS方式将首节点引用设置为null,如果成功,则直接返回首节点的元素,如果不成功,则表示另外一个线程已经进行了一次出队操作并更新了head节点,导致元素发生变化,需要重新获取首节点。
6.3 Java中的阻塞队列
6.3.1 什么是阻塞队列?
阻塞队列是一个支持两个附加操作的队列。 这两个附加操作支持阻塞的插入和移除方法。
1)支持阻塞的插入方法:当队列满时,队列会阻塞插入元素的线程,直到队列不满。
2)支持阻塞的移除方法:在队列为空时,获取元素的线程会等待队列变成非空。
阻塞队列常用于生产者和消费者的场景,生产者向队列里添加元素,消费者从队列里取元素。在阻塞队列不可用时(消费者取时,队列为空,生产者添加时,队列已满),这两个附加操作提供了4中处理方式:

- 抛出异常:当队列满时,如果再往队列里插入元素,会抛出IllegalStateException(“Queuefull”)异常。当队列空时,从队列获取元素会抛出NoSuchElmentException异常。
- 返回特殊值:当往队列插入元素时,会返回元素是否插入成功,成功返回true。当从队列取元素时,如果没有则返回null。
- 一直阻塞:当队列满时,如果生产者线程往队列put元素,则队列会一直阻塞生产者线程直到队列可用或响应中断。当队列空时,如果消费者线程从队列里take元素,队列会阻塞消费者线程直到队列不为空。
- 超时退出:当队列满时,如果生产者线程往队列里插入元素,队列会阻塞生产者线程一段时间,如果超过了指定的时间,生产者线程就会退出。当队列空时,如果消费者线程从队列取元素,队列会阻塞消费者线程一段时间,直到超过指定的时间,消费者线程退出。
【备注】:如果是无界阻塞队列,队列不可能出现满的情况,所以使用put或offer方法永远不会被阻塞,而且使用offer方法时,永远返回true。
6.3.2 Java里的阻塞队列
JDK7 提供的7个阻塞队列 :
(1)ArrayBlockingQueue:一个由数组结构组成的有界阻塞队列。
此队列按照先进先出(FIFO)的原则对元素进行排序。默认情况下不保证线程公平的访问队列。但可通过以下代码创建一个公平的阻塞队列:

为了保证公平性,通常会降低吞吐量,其实现是依靠可重入锁:

(2)LinkedBlockQueue:一个由链表结构组成的有界阻塞队列。
此队列的默认和最大长度为Integer.MAX_VALUE。按照先进先出(FIFO)的原则对元素进行排序。但不保证线程公平的访问队列,也不提供创建公平访问队列的方法。
(3)PriorityBlockingQueue:一个支持优先级排序的无界阻塞队列。
默认情况下元素采用自然顺序升序排序。也可自定义类实现compareTo()方法来执行元素排序规则,或初始化PriorityBlockingQueue时,执行构造参数Comparator来对元素进行排序。但PriorityBlockingQueue不能保证同优先级元素的顺序。
(4)DelayQueue:一个使用优先级队列实现的无界阻塞队列。
DelayQueue是一个支持演示获取元素的无界阻塞队列。队列使用PriorityQueue实现。队列中的元素必须实现Delayed接口,在创建元素时可以指定多久才能从队列中获取当前元素。只有在延迟期满时才能从队列中提取元素。
DelayQueue可以用在以下场景:
1)缓存系统的设计:用来保存缓存元素的有效期。使用一个线程循环查询DelayQueue,一旦能从DelayQueue中获取元素时,表示缓存有效期到了。
2)定时任务调度:使用DelayQueue保存当天将会执行的任务和执行时间,一旦从DelayQueued中获取到任务就开始执行,如TimerQueue就是使用DelayQueue实现的。
(5)SynchronousQueue:一个不存储元素的阻塞队列。
此队列每一个put操作必须等待一个take操作,否则不能继续添加元素。默认情况下线程采用非公平性策略访问队列,但可通过以下方法设置以公平策略访问:
SynchronousQueue本身不存储任何元素,只是负责把生产者线程处理的数据直接传递给消费者线程。其吞吐量高于LinkedBlockingQueue和ArrayBlockingQueue。
(6)LinkedTransferQueue:一个由链表结构组成的无界阻塞队列。
相比其他的阻塞队列,LinkedTransferQueue多了tryTransfer和transfer方法。
transfer方法:如果当前有消费者正在等待接收元素,transfer方法可以把生产者传入的元素立刻transfer给消费者。如果没有消费者等待接受元素,transfer方法会将元素存放在队列的tail节点,直到该元素被消费者消费才返回。
tryTransfer方法:tryTransfer方法用来试探生产者传入的元素是否能直接传给消费者消费。如果没有消费者等待接收元素,返回false,反之,返回true。tryTransfer方法会立即返回,而不用等待元素被消费以后才返回。
对于带有时间限制的tryTransfer(E e,long timeout,TimeUnit unit)方法,试图把生产者传入的元素直接传给消费者,但如果没有消费者消费该元素则等待指定的时间再返回,如果超时还没有消费元素,则返回false,如果在超时时间内消费了元素则返回true。
(7)LinkedBlockingDeque:一个由链表结构组成的双向阻塞队列。
LinkedBlockingDeque是一个可以从队列两端插入和移除元素的队列。因为与其他阻塞队列相比,多了一个操作队列的入口,所以在多线程同时入队时,也就减少一半的竞争。
6.3.3 阻塞队列的实现原理
阻塞队列使用通知模式实现,即当生产者往满的队列里添加元素时会阻塞生产者线程,当消费者消费了队列中一个元素后,会通知生产者当前队列可用。
以下为ArrayBlockingQueue源码:
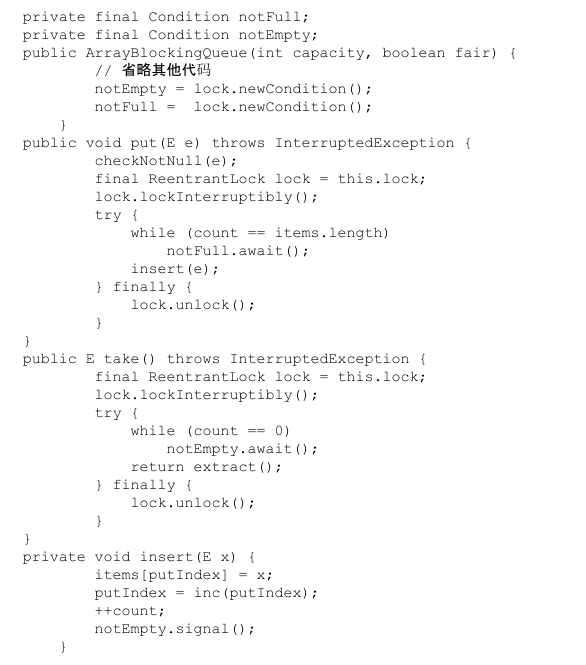
当往队列插入一个元素,如果队列不可用,那么阻塞生产者主要通过LockSupport.park(this)来实现。
6.4 Fork/Join框架
6.4.1 Fork/Join框架的定义
Fork/Join框架是Java 7提供的一个用于并行执行任务的框架,它可以把大任务分割成若干个小任务,最终汇总每个小任务结果后得到大任务结果的框架。 其运行流程如下:

6.4.2 工作窃取算法
工作窃取算法是指某个线程从其他队列里窃取任务来执行。当我们需要做一个大任务时,可以把这个任务分割成若干互不依赖的子任务,为了减少线程竞争,把子任务分别放入不同队列,并为每个队列创建一个单独的工作线程,假设,有其他线程提前把自己队列任务做完之后,还需要等待其他线程,这时,为了提高效率,已经做完任务的线程会去其他队列窃取任务执行,以帮助其他未完成的线程。此时他们访问同一个队列,为了减少窃取任务线程和被窃取任务线程之间的竞争,通常会使用双端队列。被窃取任务线程永远从双端队列头部取任务执行,窃取任务线程永远从双端队列尾部拿任务执行。其运行流程图如下:

工作窃取算法优点:就是充分利用线程进行并行计算,减少了线程间的竞争。
工作窃取算法缺点:当双端队列里只有一个任务时,还时会存在竞争。而且该算法创建多个线程和多个双端队列,会消耗更过的系统资源。
6.4.3 Fork/Join框架的设计
Fork/Join框架有以下两个步骤:
- 分割任务:首先我们需要有一个fork类来把大任务分割成子任务,如果子任务仍然很大,还需要不停分割,直到分割出的子任务足够小。
- 执行任务并合并结果:分割的子任务分别放在双端队列,然后启动线程分别从队列取任务执行,执行完的结果统一放在一个队列里,启动一个线程从队列里拿数据并合并数据。
Fork/Join使用两个类来完成上述工作:
- ForkJoinTask:要使用ForkJoin框架,必须先创建一个ForkJoin任务。它提供在任务中执行fork和join操作机制,在使用时,我们通常继承ForkJoinTask的子类:RecursiveAction或RecursiveTask,两者区别是RecursiveAction用于没有返回结果的任务,RecursiveTask用于有返回结果的任务。
- ForkJoinPool:ForkJoinTask需要通过ForkJoinPool来执行。被分割出来的子任务会添加到当前工作线程所维护的双端队列中,进入队列的头部。当一个工作线程的队列里暂时没有任务时,它会随机从其他工作线程的队列的尾部窃取一个任务执行。
6.4.4 使用Fork/Join框架
6.4.5 Fork/Join框架的异常处理
ForkJoinTask在执行时可能抛出异常,但我们无法再主线程里捕捉异常,但可以通过ForkJoinTask的isCompletedAbnnormally()方法来检查任务是否已经抛出异常或已经被取消,调用getException()可以获取异常,此方法返回Throwable对象,如果任务取消则返回CancellationException。如果任务没有完成或者没有抛出异常则返回null。
6.4.6 实现原理
ForkJoinPool由ForkJoinTask数组和ForkJoinWorkerThread数组组成,ForkJoinTask数组负责存放程序提交给ForkJoinPool的任务,而ForkJoinWorkerThread数组负责执行这些任务。
(1)ForkJoinTask的fork方法实现原理
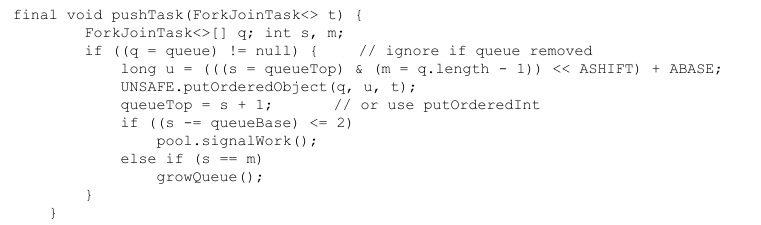
当我们调用ForkJoinTask的fork方法时,程序会调用ForkJoinWorkerThread的pushTask方法异步地执行这个任务,然后立即返回结果。

pushTask方法把当前任务存放在ForkJoinTask数组队列里,然后调用ForkJoinPool的signalWork()方法唤醒或创建一个工作线程来执行任务。
(2)ForkJoinTask的join方法实现原理
Join方法的主要作用是阻塞当前线程并等待获取结果。
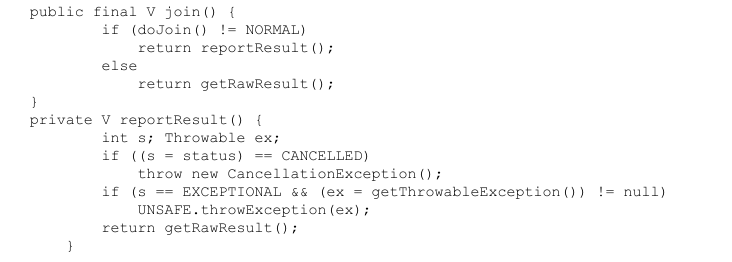
首先,它调用doJoin()方法获取当前任务状态,任务有4中状态:已完成(NORMAL),被取消(CANCELLED),信号(SIGNAL)和出现异常(EXCEPTIONAL)。如果任务状态是已完成,则直接返回任务结果。如果任务被取消,则抛出CancellationException。如果任务抛出异常,则直接抛出对应异常。
doJoin()方法源代码:
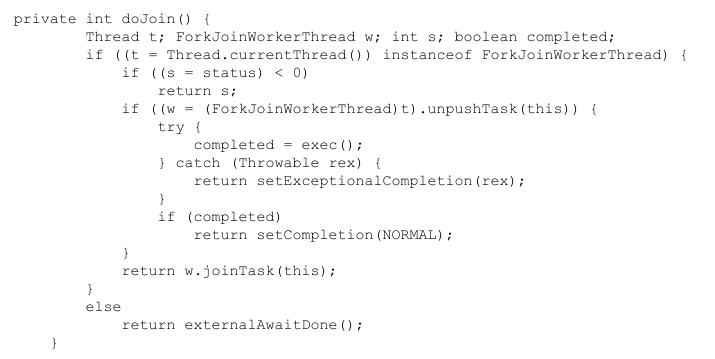
在doJoin()方法中,会查看任务状态,如果任务已经执行完成,则直接返回任务状态,如果没有执行完成,则从任务数组里取出任务并执行。如果顺利执行完毕,则将任务状态设置为NORMAL,如果出现异常,则将任务状态设置为EXCEPTION。