今天起,我们就开始学习第三本书了

这本书主要讲的是蒙特卡罗渲染,以及相关的数学、术语概念等
这本书相较于前面两本有着什么不同,承担着什么样的任务,尚涉书未深,姑妄言之:
第一本书,带领我们初探光线追踪技术,感受一下
第二本书,篇幅页目最多,带着我们一步一步,构建了一个“真正”的光线追踪器,这里真正指的是,第二本书的内容较广,涉及纹理、光照、烟雾,随机初步等,所谓麻雀虽小,五脏俱全,此所谓“真正”
第三本书,让我们更加走进了实际的光线追踪器,偏向工业级的,所以,作者前言即讲到,如果你想要从事光线追踪相关的行业,这本书为你准备。学过第二本书,我们知道,越往后面,渲染效果越不尽人意,这里指的是如果采样点过少(例如几百),根本无法渲染出真实的效果,比如光照相关的Cornell box例子就有很多噪声干扰,这些,玩玩还可以,但是,离专业还有距离,也就是它只是一个五脏俱全的劣质品,并不能称得上是真正的光线追踪器。
而这本书承担的任务只有一个,就是利用Monte Carlo(MC)方法优化我们第二本书中的渲染效果,也就是为第二本书中的光线追踪机器装一个高端的引擎驱动内核零件,让它更好。
我们先来一个简单的开胃菜
chapter 1:A Simple Monte Carlo Program
蒙特卡罗方法(MC)是一种统计模拟方法,是一类很重要的数值计算方法,它是一种使用随机数解决好很多实际问题的方法。
先来看一个很简单的例子:估计π
有很多经典的方法,其中之一是
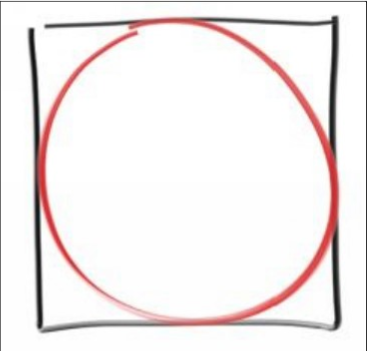
假设你扔了很多随机的点到方框中,那么有一部分在圆内,其中圆内点和方框点的比例应该就是圆的面积和方框面积的比例,由此:
比例 = (π * R * R)/((2R)*(2R)) = π/4
所以上式和R无关,我们任意取R = 1,圆心位于原点,则
#include <iostream> #include <lvgm andfunc.hpp> #define stds std:: using namespace lvgm; void estimate_π(const size_t points) { int inside = 0; for (int i = 0; i < points; ++i) { double x = 2 * rand01() - 1; double y = 2 * rand01() - 1; if (x*x + y*y < 1) inside++; } stds cout << "Estimate of π by" << points << "test points is " << 4 * double(inside) / points << stds endl; }
int main()
{
estimate_π(1000);
estimate_π(10000);
estimate_π(100000);
estimate_π(1000000);
estimate_π(10000000);
estimate_π(10000000 / 2);
}
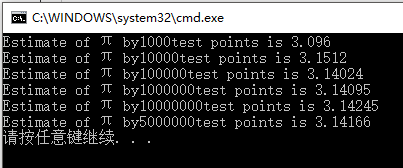
模拟结果为
当然我们可以利用下面的程序使结果迅速逼近π
void lawDiminishingReturns() { int inside = 0; int runs = 0; while (true) { runs++; double x = 2 * rand01() - 1; double y = 2 * rand01() - 1; if (x*x + y*y < 1) inside++; if(runs % 10000 == 0) stds cout << "Estimate of π by" << runs << "test points is " << 4 * double(inside) / runs << stds endl; } }
结果:
.
一开始非常快速的逼近π,之后变化就比较缓慢了,这是一个收益递减法(Law of Diminishing Returns)的例子
即每一个样本对结果的收益少于后面一个,这个是MC的一个缺点,我们可以通过对样本进行分层来减轻这种递减收益,此法通常称为抖动
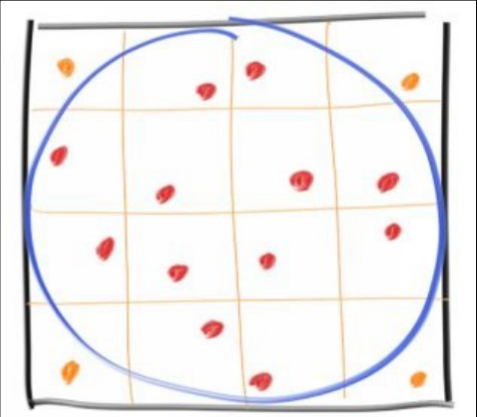
我们进行网格划分,并在每个网格中选取一个样本:
我们采用边长为1e4的方框进行测试
void stratify() { size_t inside{ 0 }; size_t circle_stratified{ 0 }; size_t sqrtAll = 1e4; for (int i = 0; i < sqrtAll; ++i) for (int j = 0; j < sqrtAll; ++j) { double x = 2 * rand01() - 1; double y = 2 * rand01() - 1; if (x*x + y*y < 1) inside++; x = 2 * ((i + rand01()) / sqrtAll) - 1; y = 2 * ((j + rand01()) / sqrtAll) - 1; if (x*x + y*y < 1) circle_stratified++; } stds cout << "Regular Estimate of π by 1e8 test points is " << 4 * double(inside) / 1e8 << stds endl; stds cout << "Stratified Estimate of π by 1e8 test points is " << 4 * double(circle_stratified) / 1e8 << stds endl; }
图片渲染运算读写文件的时候慢。。如今控制台运算输出也整不动了。。。。
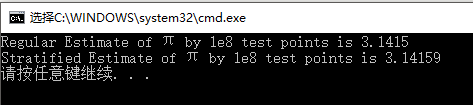
有意思~
分层方法能更好地收敛于渐近率。不足之处是,这个优势随着问题的维度而降低(例如,对于3D球体积版本,差距会更小)。 这被称为维度诅咒(=.=)。 我们的工程将是非常高的维度(每个反射增加两个维度),所以我不会在本书中进行分层。
但是,如果你做的是单反射或阴影或某些严格的2D问题,分层是个很好的选择
感谢您的阅读,生活愉快~