如何计算协方差、 协方差矩阵 、 相关系数 、 马氏距离
https://www.cnblogs.com/luoyinjie/p/11151896.html
1. 旋转坐标系
做图像处理很多时候需要用到这个公式

2. 什么是矩阵的秩
「秩」是图像经过矩阵变换之后的空间维度
「秩」是列空间的维度
我们通过旋转矩阵 进行变换: [x',y'] = [x,y]
这只是把图像旋转了 , 并没有改变图像的秩,秩仍为2
3.
极大后验(maximum a posteriori, MAP)假设:
学习器考虑候选假设集合H并在其中寻找给定数据D时可能性最大的假设h∈H(或者存在多个这样的假设时选择其中之一)这样的具有最大可能性的假设被称为极大后验(maximum a posteriori, MAP)假设。确定MAP假设的方法是用贝叶斯公式计算每个候选假设的后验概率。
更精确地说当下式成立时,称hMAP为—MAP假设:

(在最后一步我们去掉了P(D),因为它是不依赖于h的常量)
极大似然(maximum likelihood,ML)假设
在某些情况下,可假定H中每个假设有相同的先验概率(即对H中任意hi和hj,P(hi)=P(hj))。这时可把上式进一步简化,只需考虑P(D|h)来寻找极大可能假设。P(D|h)常称为给定h时数据D的似然度(likelihood),而使P(D|h)最大的假设被称为极大似然(maximum likelihood,ML)假设hML。

4. 求矩阵的模

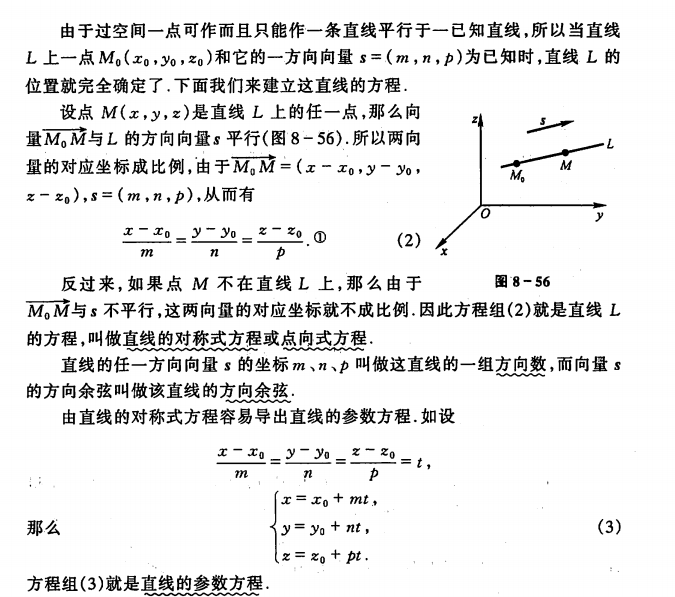
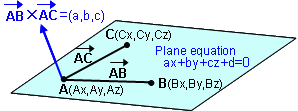
5. 平面在直角坐标系中的表达方式,
若知平面上的一点 M0(X0,Y0,Z0)和该平面的法矢量 N(A,B,C),就可以建立该平面的方程。该平面上任一点 M(X,Y,Z), 则矢量 M0M 与矢量 N 垂直,两矢量的
为零,用坐标表示方程 A(X - X0) + B(Y - Y0) + C(Z - Z0) = 0 ,这就是平面的
5.1 已知两点,求直线在三维坐标中的表达式
5.2 求直线与平面的交点, 联立方程求解就行了
5.3 已知直线的球坐标 A(r,α, β) 求OA的直线表达式 α 为直线在x-y平面投影与x轴夹角, 逆时针旋转为正, β为直线与x-y平面夹角, z>0时,β为正
x = cosαt
y = -sinαt
z = tanβt
6. 点到平面的距离
点到平面的距离:
点(x0,y0,z0)到了平面Ax+By+Cz+D=0的距离
为:d=|Ax0+By0+Cz0+D|/√(A^2+B^2+C^2)
7. 已知三点求三点所在的平面
8. 矩阵
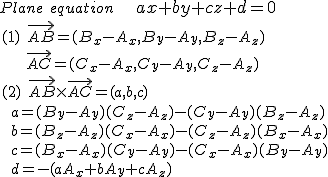
8.1. 矩阵的转置的基本性质
8.2. 矩阵乘法性质

9 稀疏矩阵是什么
在矩阵中,若数值为0的元素数目远远多于非0元素的数目,并且非0元素分布没有规律时,则称该矩阵为稀疏矩阵
10 牛顿法求非线性函数 f(x) = 0

11 已知两点求 直线方程 两点式
(x-x1)/(x2-x1)=(y-y1)/(y2-y1)。
12 凸优化
13 向量点积 x*y = |x||y|cosθ 表示为, x在y方向的投影乘以y在x方向的投影
x在y方向的投影 = x*y / |y|
14 范数
L1 范数 
L2 范数 ![]()
15 函数关于直线的对称方程

由上可以求得
f( x, y ) 关于 y = -x +1 对称的方程为 f(1-y, 1-x)
f( x, y ) 关于 y = x 对称的方程为 f(y, x)
16 给定初始点(x1, y1) (x2, y2) 目标点 (x1‘, y1') (x2', y2') 求映射矩阵 x' = Mx M ={ {a1 a2}, { b1,b2 } }
x' = a1x + a2y
y' = b1x + b2y
x1 y1 0 0
0 0 x1 y1 * [a1 a2 b1 b2]T = [x1' y1' x2' y2']'
x2 y2 0 0
0 0 x2 y2
左右同时乘以 M-1 既可算出结果
17 一些曲线的平滑函数
1. Quadratic Bézier curves https://en.wikipedia.org/wiki/B%C3%A9zier_curve
2. Hermite 曲线 https://www.cnblogs.com/jqm304775992/p/5044728.html