在图像模式匹配中,可以使用图像矩不变量进行形态匹配,具体如下:
1 图像的矩
图像的(p + q)阶矩可表示为 
 ,
,
当同一图像发生平移后,除了  保持不变,其他高阶矩均会发生改变,为了使图像矩的平移不变,需要引入中心矩。
保持不变,其他高阶矩均会发生改变,为了使图像矩的平移不变,需要引入中心矩。
使用以下公式  可得到图像中心,
可得到图像中心,
图像中心矩可表示为  。
。
图像中心矩与图像矩之间存在一个固定的关系,在时间计算中,一般可以遍历图像以求解到图像矩,
然后根据中心矩与矩之间的关系可直接计算出中心矩形,公式如下:




当同一图像发生缩放变化后,所有中心矩都发生了改变,为了保持缩放不变性,需要引入归一化中心矩。
定义  可对中心矩归一化。
可对中心矩归一化。
opencv 提供了函数 Moments moments(InputArray array, bool binaryImage=false ) 求解图像矩, 参数 array 可以是二值图像, vector<Point>, N*1 双通道Mat。
返回值 Moments 为一个结构体,定义如下
class Moments
{
public:
double m00, m10, m01, m20, m11, m02, m30, m21, m12, m03;
double mu20, mu11, mu02, mu30, mu21, mu12, mu03;
double nu20, nu11, nu02, nu30, nu21, nu12, nu03;
}
2 旋转不变性
归一化中心矩可以达到平移,缩放不变性,但对于同一图像做任意旋转,归一化中心矩无法满足旋转不变性。
1) 代数不变量
对于二项式  ,对变量 x,y 做旋转变换
,对变量 x,y 做旋转变换  ,
,
得到  ,满足
,满足  。
。
因此, 二项式满足严格的旋转不变性,即代数不变量。
2)矩不变量
根据代数不变量性质,归一化图像中心矩为变量x,y的多项式表达,如果可以构造出类似二项式表达式,则该表达式满足旋转不变性。
MING-KUEI HU 在归一化中心矩基础构造出了7个hu矩以满足旋转不变量,具体如下:
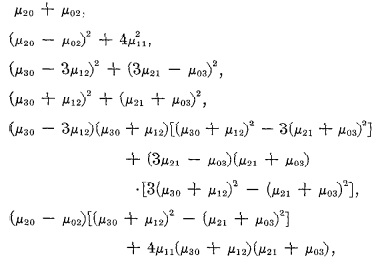
opencv 提供了函数 void HuMoments(const Moments& moments, double hu[7]) 函数来计算7个HU矩,
通过比较各个形状对应的HU矩,可以对相似形状进行匹配。
参考资料 Learning OpenCV 3 Adrian Kaehler & Gary Bradski
Visual Pattern Recognition by Moment Invariants MING-KUEI HU