题目描述
描述:
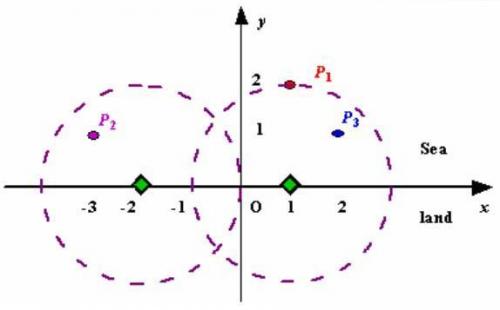
假设海岸线是一条无限延伸的直线。它的一侧是陆地,另一侧是海洋。每一座小岛是在海面上的一个点。雷达必须安装在陆地上(包括海岸线),并且每个雷达都有相同的扫描范围d。你的任务是建立尽量少的雷达站,使所有小岛都在扫描范围之内。
数据使用笛卡尔坐标系,定义海岸线为x轴。在x轴上方为海洋,下方为陆地。
样例1如图所示
输入输出格式
输入格式:
第一行包括2个整数n和d,n是岛屿数目,d是雷达扫描范围。
接下来n行为岛屿坐标。
输出格式:
一个整数表示最少需要的雷达数目,若不可能覆盖所有岛屿,输出“-1”。
输入输出样例
说明
数据范围
n le 1000n≤1000 ,d le 20000d≤20000
| x_i | le 2 imes 10^6∣xi∣≤2×106 ,0 le y_i le 200000≤yi≤20000
//* 雷达覆盖问题 - 问题转化: //-1、将问题稍微进行转化:将基站设为覆盖半径为 D。 则问题变为:每个基站的覆盖区域必须要有雷达。 //-2、又因为雷达只能放在 X 轴上,所以每个基站覆盖的其实是一条线段。 则问题变为:每条线段上必须要要 有雷达。 //-3、又因为雷达只能放在 X 轴上,所以每个基站覆盖的其实是一条线段。则问题变为:每条线段上必须要要 有雷达。 // //问题:如何贪心?回想活动安排问题。 //解题思路: //先计算出每个岛屿与x轴的左右交点,然后按照右端点进行排序,枚举每一个岛屿, //①如果这个岛屿没有被雷达覆盖,那么就将一个雷达放在其与x轴的右端交点,并枚举这个岛屿后面的岛屿,判断这个雷达能否将后面的岛屿覆盖。 //②如果该岛屿已经被覆盖,则直接跳过。 #include<cmath> #include<cstdio> #include<cstring> #include<iostream> #include<algorithm> #define date 100005 using namespace std; int n; int d; int sum; int x,y; float z; int line[date]; struct Point { float x; float y; bool flag; }point[date]; bool cmp(Point a,Point b) //按照与x轴右侧的交点排序 { return a.y<b.y; } void work() { for(int i=1;i<=n;i++) { if(!point[i].flag) //如果此处没有被雷达覆盖 { point[i].flag=1; //把雷达放在与x轴右侧的交点 sum++; //雷达数加一 for(int j=i+1;j<=n;j++) //枚举后面的岛屿 { if(!point[j].flag&&point[j].x<=point[i].y) //如果后面的岛屿没有被雷达覆盖,并且与当前的岛有交点 { point[j].flag=1; //标记为已被覆盖 } } } } cout<<sum; } void init() { scanf("%d",&n); scanf("%d",&d); for(int i=1;i<=n;i++) { scanf("%d%d",&x,&y); if(y>d) { cout<<-1; return; } z=sqrt(d*d-y*y); //计算与x轴的交点 point[i].x=x-z; //左交点 point[i].y=x+z; //右交点 } sort(point+1,point+n+1,cmp); //排序 work(); } int main() { init(); return 0; }