ROS中有如下3种获取参数的方式。
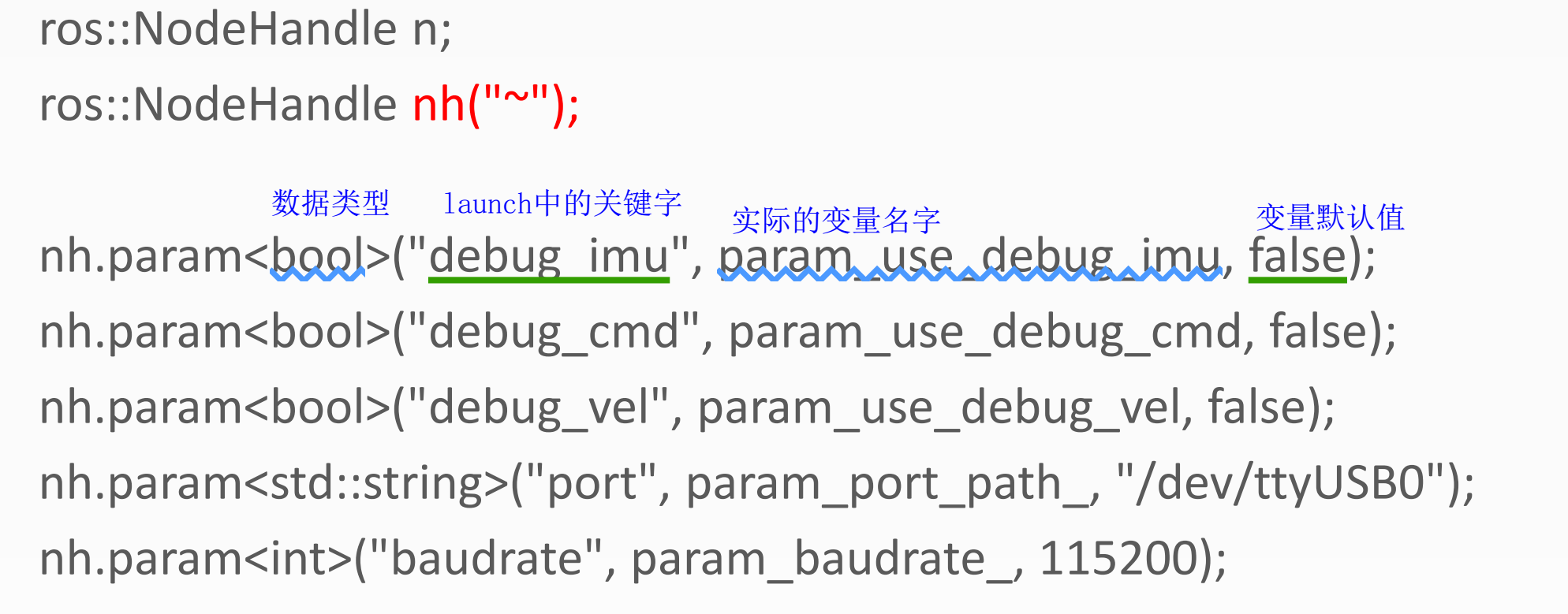
在launch中写
<param name="debug_imu" value="true"> 不管是上面何种数据类型都要带引号
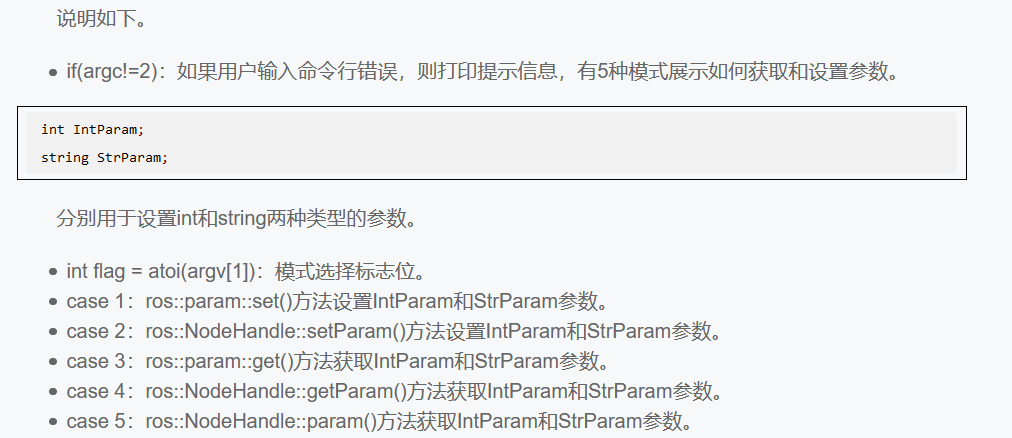
#include "ros/ros.h" #include <cstdlib> using namespace std; int main(int argc,char** argv) { //initial and name node ros::init(argc,argv,"node_param"); if(argc!=2) { cout<<"Error command paramter! Please run command eg: " <<"rosrun book_param book_param 1 " <<"help information: " <<" 1 ------ set param mode(ros::param::set()) " <<" 2 ------ set param mode(ros::NodeHandle::setParam()) " <<" 3 ------ get param mode(ros::param::get()) " <<" 4 ------ get param mode(ros::NodeHandle::getParam()) " <<" 5 ------ get param mode(ros::NodeHandle::param()) " <<endl; return 1; } //create node handle ros::NodeHandle nh; //param variable int IntParam; string StrParam; bool isIntParam, isStrParam; //mode flag int flag = atoi(argv[1]); // set or get param with different ways switch(flag) { case 1: ROS_INFO("set param mode(ros::param::set()):"); ros::param::set("IntParam",1); ros::param::set("StrParam","stringdemo"); break; case 2: ROS_INFO("set param mode(ros::NodeHandle::setParam()):"); nh.setParam("IntParam",1); nh.setParam("StrParam","stringdemo"); break; case 3: ROS_INFO("get param mode(ros::param::get()):"); isIntParam = ros::param::get("IntParam",IntParam); isStrParam = ros::param::get("StrParam",StrParam); if(isIntParam){ ROS_INFO("The IntParam is:%d",IntParam); }else{ ROS_INFO("Get IntParam fail!"); } if(isIntParam){ ROS_INFO("The StrParam is:%s",StrParam.c_str()); }else{ ROS_INFO("Get StrParam fail!"); } break; case 4: ROS_INFO("get param mode(ros::NodeHandle::getParam()):"); isIntParam = nh.getParam("IntParam",IntParam); isStrParam = nh.getParam("StrParam",StrParam); if(isIntParam){ ROS_INFO("The IntParam is:%d",IntParam); }else{ ROS_INFO("Get IntParam fail!"); } if(isIntParam){ ROS_INFO("The StrParam is:%s",StrParam.c_str()); }else{ ROS_INFO("Get StrParam fail!"); } break; case 5: ROS_INFO("get param mode(ros::NodeHandle::param()):"); //warning: this way will set default value when get no param! nh.param("IntParam",IntParam,11); // be careful when use ros::NodeHandle::param get string param! nh.param<std::string>("StrParam",StrParam,"stringdemo_default"); ROS_INFO(" The IntParam is:%d The StrParam is:%s",IntParam,StrParam.c_str()); break; default: ROS_INFO("flag value is not in range: [1,5]"); } return 0; }