(1)目标分割,应该是Target Segmentation,应该是data/image segmentation的一种。
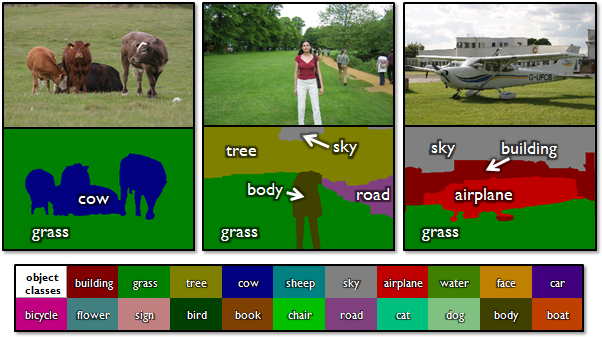
这里假定数据是图像,就如楼上说的,任务是把目标对应的部分分割出来。对于一般的光学图像而言,分割像素是一个比较常见的目标,就是要提取哪一些像素是用于表述已知目标的。这种Segmentation可以是一个分类(classificatio)问题,就是把每一个pixel做labeling,提出感兴趣的那一类label的像素。也可以是clustering的问题,即是不知道label,但需要满足一些optimality,比如要cluster之间的correlation最小之类的。当然,答主也见过一些针对其他数据的目标分割,比如hyperspectral data,也需要分割哪些频率或者通道对应的是目标。比如视频流,那段时间对应是目标。
下面是一个Target Segmentation的栗子:
 (2)目标识别,应该是Target Recognition。
(2)目标识别,应该是Target Recognition。 这是一个基于分类(Classification)的识别(Recognition)问题,即是在所有的给定数据中,分类出哪一些sample是目标,哪一些不是。还是拿图片作为数据举例,这个分类的层面往往不是pixel,给定的一些segment,或者定义的对象(Object),或者图片本身。
下面是一个Target Recognition的栗子:

(3)目标检测,应该是Target Detection。
下面是一个Target Recognition的栗子:
(3)目标检测,应该是Target Detection。
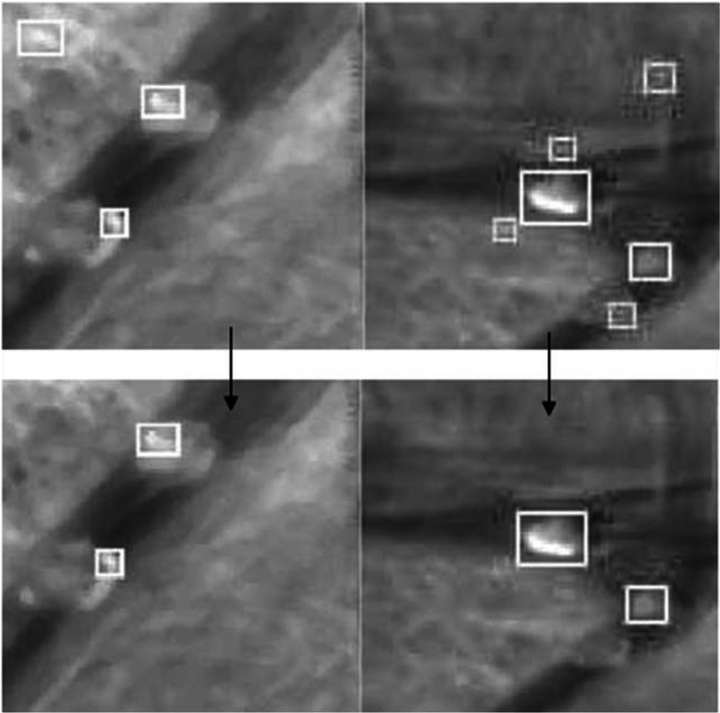
最早的detection system应该是搞雷达的人首先提出并且heavily study的,最简单的任务就是从看似随机(random)又充满干扰(interference)和噪音(noise)的信号中,抓取到有信息的特征(information-bearing pattern)。最简单的一个栗子,就是当你拿到一段随机的雷达回波,可以设置一个threshold,当高于这个threshold,就认为是探测到了高速大面积飞行器之类的高回波的目标。当然,这里面的threshold该怎么设计,涉及到False Alarm和Miss Detection之间的平衡。人们往往需要寻找最佳的transform或者domain去对信号进行分析。
下面是一个Target Detection的栗子:
(4)目标追踪,应该是Target Tracking。
下面是一个Target Detection的栗子:
(4)目标追踪,应该是Target Tracking。
这个任务很重要的第一点是目标定位(Target Locating),而且这个任务设计到的数据一般具有时间序列(Temporal Data)。常见的情况是首先Target被Identify以后,算法或者系统需要在接下来时序的数据中,快速并高效地对给定目标进行再定位。任务需要区别类似目标,需要避免不要的重复计算,充分利用好时序相关性(Temporal Correlation),并且需要对一些简单的变化Robust,必须旋转,遮盖,缩小放大,Motion Blur之类的线性或者非线性变化。
下面是一个Target Detection的栗子:
下面是一个Target Detection的栗子:

本文摘录自:https://www.zhihu.com/question/36500536