迭代一般方程:

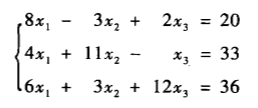
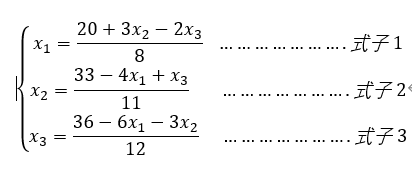
本文实例方程组:
一.jacobi迭代法
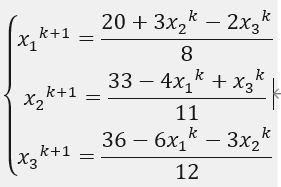
从第i个方程组解出xi。
线性方程组Ax=b,先给定一组x的初始值,如[0,0,0],第一次迭代,用x2=0,x3=0带入第一个式子得到x1的第一次迭代结果,用x1=0,x3=0,带入第二个式子得到x2的第一次迭代结果,用x1=0,x2=0带入第三个式子得到x3的第一次迭代结果。得到第一次的x后,重复第一次的运算。

转化成一般的形式:(其中L是A的下三角部分,D是A的对角元素部分,U 是上三角部分)

得到迭代公式:
其中的矩阵B和向量f如何求得呢?
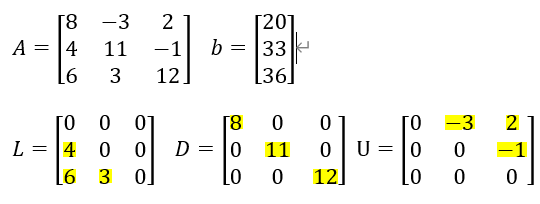
其实,矩阵B的计算也很简单,就是每行的元素/该行上的对角元素

二.Gauss-Seidel迭代法【收敛速度更快】
这个可以和jacobi法对比进行理解,我们以第二次迭代为例(这里的第一次迭代结果都用一样的,懒得去换)
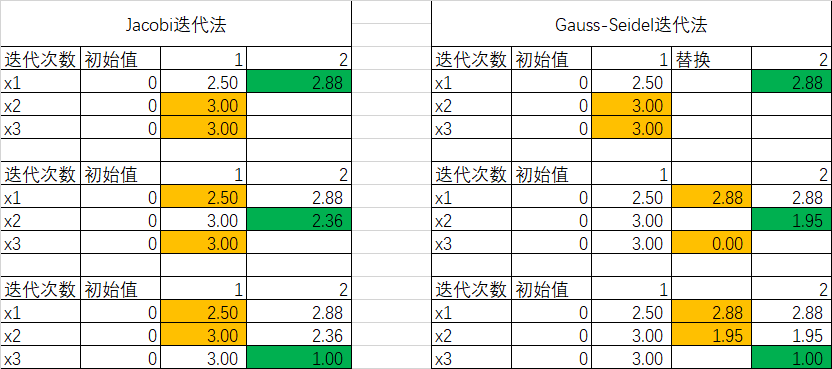
从上表对比结果可以看出,Jacobi方法的第二次迭代的时候,都是从第一次迭代结果中,获取输入值。
上一次迭代结果[2.5,3.0,3.0],将这个结果带入上面式子1,得到x1=2.88,;将[2.5,3.0,3.0]替换成[2.88,3.0,3.0]带入第二个式子的运算,这里得到x2=1.95,所以把[2.88,3.0,3.0]替换成[2.88,1.95,3.0]输入第三个式子计算X3=1.0.这就完成了这一次的迭代,得到迭代结果[2.88,1.95,1.0],基于这个结果,开始下一次迭代。
特点:jacobi迭代法,需要存储,上一次的迭代结果,也要存储这一次的迭代结果,所以需要两组存储单元。

而Gauss-Seidel迭代法,每一次迭代得到的每一个式子得到的值,替换上一次迭代结果中的值即可。所以只需要一组存储单元。

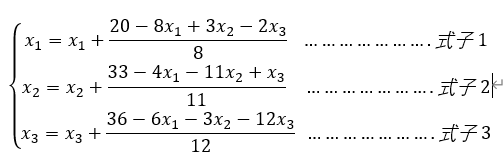
转化成一般式:

注意:第二个式子中的 是k+1次迭代的第一个式子的值,不是第k次迭代得值。
是k+1次迭代的第一个式子的值,不是第k次迭代得值。

计算过程同jacobi迭代法的类似
三.逐次超松弛法SOR法
上面仅仅通过实例说明,Jacobi和Seidel迭代的运算过程。并没有构造其一般的计算公式。
Gauss-Seidel迭代法的一般公式:
![]() .......................式1.1
.......................式1.1
对于这个公式,怎么看着都比较别扭,分解一下就是
将式1.1改写:
![]() .......................式1.2
.......................式1.2
同样分解一下:
注意:左侧的x是本次(k+1)需要求的迭代结果,右侧的x是上次(k)的迭代结果。
![]() .......................式1.3
.......................式1.3
![]() .......................式1.4
.......................式1.4
分解一下:
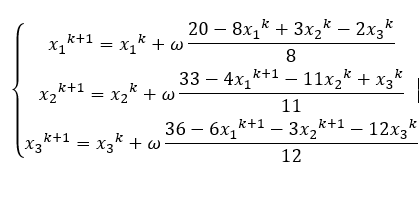
 松弛因子,当松弛因子=1时,就是seidel迭代法,当调节松弛因子时,可以加快或减缓迭代速度。(和深度学习中的学习因子一个意思)
松弛因子,当松弛因子=1时,就是seidel迭代法,当调节松弛因子时,可以加快或减缓迭代速度。(和深度学习中的学习因子一个意思)
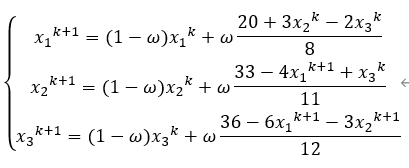
改写成矩阵形式:
![]()

对矩阵公式进行实例化分解之后,能够直观的理解,这个公式。
四.迭代的收敛条件
从上面的实例,不断的迭代,最终可以获得需要的解。这是在给点的线性方程组的迭代方程收敛。当然,也存在不收敛的情况,最终得不到正确的解。

其中:
谱半径:
1范数:
![]()
∞范数:
![]()
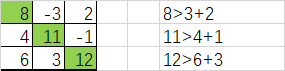
严格对角占优:
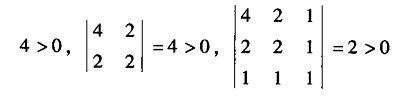
正定(顺序主子式都>0):
误差限:
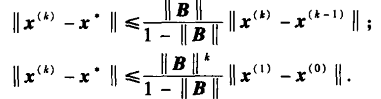
其中范数||B||<1