前言
(本文中的图片都由(WPS)出品)
(DP) 是 (OI) 中重要的一部分
一般来说,因为 (DP) 会把之前的结果保存下来,所以时间复杂度还是比较优秀的
但是在某些情况下,时间复杂度仍然超出了题目的限制,这是我们就要考虑对其进行优化
(DP) 的优化一般从状态、决策、转移三个方面去考虑
而斜率优化则是对决策进行优化的一种方法
它适用于类似 (f[i]=min/max(a[i] imes b[j]+c[i]+d[j])) 的方程
例题(洛谷 P4072 [SDOI2016]征途 )
题目描述
(Pine) 开始了从 (S) 地到 (T) 地的征途。
从(S)地到(T)地的路可以划分成 (n) 段,相邻两段路的分界点设有休息站。
(Pine)计划用(m)天到达(T)地。除第(m)天外,每一天晚上(Pine)都必须在休息站过夜。所以,一段路必须在同一天中走完。
(Pine)希望每一天走的路长度尽可能相近,所以他希望每一天走的路的长度的方差尽可能小。
帮助(Pine)求出最小方差是多少。
设方差是(v),可以证明,(v imes m^2)是一个整数。为了避免精度误差,输出结果时输出(v imes m^2)。
输入格式
第一行两个数 (n)、(m)。
第二行 (n) 个数,表示 (n) 段路的长度
输出格式
一个数,最小方差乘以 (m^2) 后的值
输入输出样例
输入 #1
5 2
1 2 5 8 6
输出 #1
36
说明/提示
对于 (30\%) 的数据,(1 le n le 10)
对于 (60\%) 的数据,(1 le n le 100)
对于 (100\%) 的数据,(1 le n le 3000)
保证从 (S) 到 (T) 的总路程不超过 (30000) 。
分析
要对一个状态转移方程进行优化,首先要把最朴素的方程写出来
在本题中,稍加推导即可写出时间复杂度为 (O(m imes n^2))的状态转移方程
又因为 (overline{v}=frac{sum[n]}{m})
所以
后面的值是固定的,所以我们只需要让前面的值最小化即可
我们设(f[i][j])为前(i)天分成(j)段所得到的最小值
那么就有
展开就有
接下来就是本文的重点:如何用斜率优化这类方程
首先,你需要掌握一次函数 (y=kx+b) 的图像和性质
这应该问题不大
下面我们就要对方程进行移项,使其变成易于优化的形式
我们发现,这和一次函数的解析式完全吻合
我们把(f[j][k-1]+sum[j]^2)看成(y)
把(2 imes sum[i])看成(k)
把(sum[j])看成(x)
把(f[i][k]-sum[i]^2)看成(b)
这样,对于每一个(i)来说,直线的(k)是确定的
我们要使(f[i][k])最小,也就是要使(b)最小
我们可以把所有的(j)想象成空间坐标为((sum[j],f[j][k-1]+sum[j]^2))中的点
知道了斜率,知道了直线上的点,那么这条直线就确定了
那么我们考虑什么样的点使直线的(b)最小
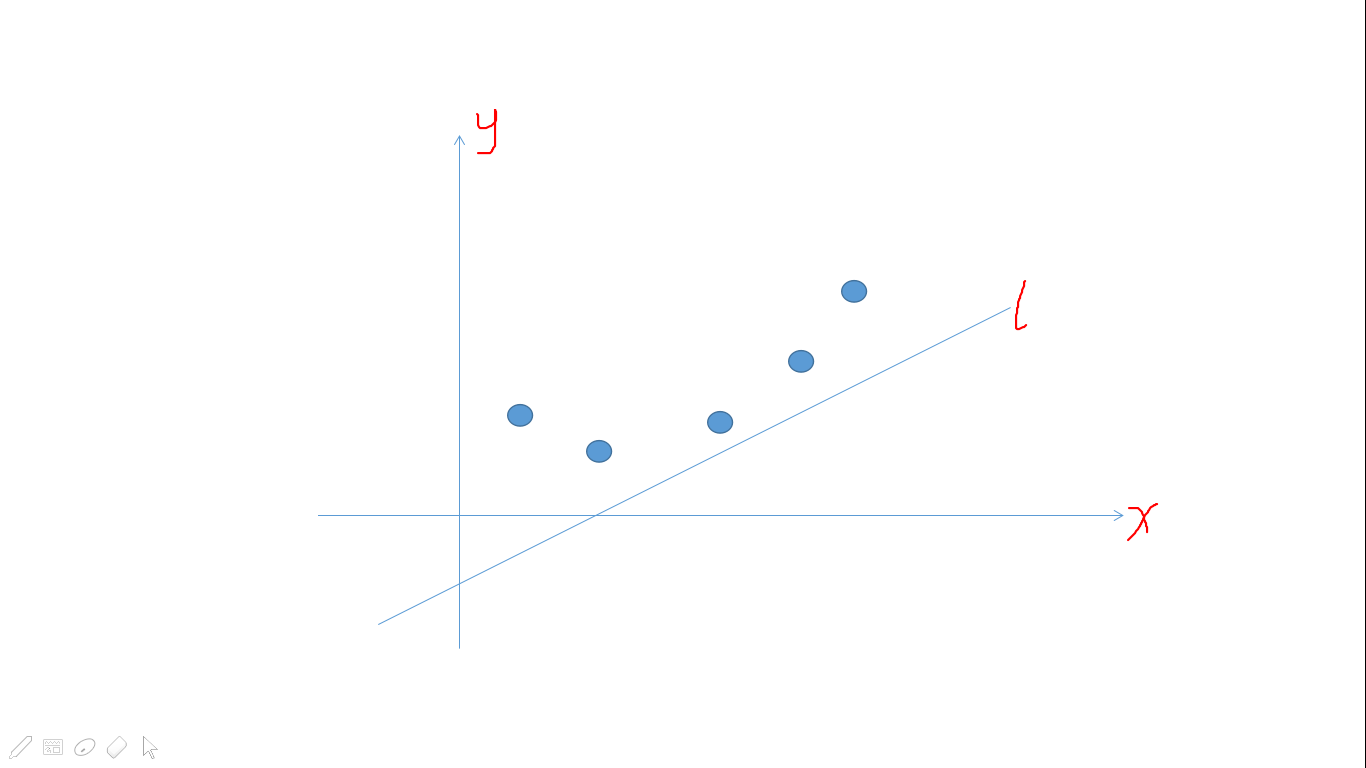
直线(l)是我们要移动的直线,平面中的点是可以转移的(j)值
我们会发现当当前点和后一个点形成的直线的斜率恰好大于直线(l)的斜率时,由当前点转移决策是最优的
在这里要特别强调一下:本题中斜率(k) 和 横坐标 (x) 均为单调递增的,对于 (k) 和 (x)不单调递增的情况,处理方式不同
这就是代码里面的
while(head<tail && xl(q[head],q[head+1])<2*sum[j]) head++;
我们再去考虑什么样的点肯定不会对结果产生贡献

上面的图中(2)号节点是无论如何也不会更新其它节点的
因为(1)号节点或(3)号节点总会比它更优
这就是代码里的
while(head<tail && xl(j,q[tail-1])>=xl(j,q[tail])) tail--;
整个过程就相当于维护了一个下凸包
在求斜率的函数中,我们要判掉 (x) 相等的情况,在某些时候,还要判掉 (y) 相等的情况
double X(int id){
return (double)sum[id];
}
double Y(int id){
return (double)(g[id]+sum[id]*sum[id]);
}
double xl(int i,int j){
if(std::fabs(X(i)-X(j))<eps){
if(std::fabs(Y(i)-Y(j))<eps) return 0;
else if(Y(i)>Y(j)) return 1e18;
else return -1e18;
}
return (Y(i)-Y(j))/(X(i)-X(j));
}
拓展一:斜率不单调但x单调
如果斜率不是单调递增,我们就不能从前面清空队列直接转移

比如上面这幅图如果在遇到直线 (m) 时一直从前清空队列的话那么就会把(3)号决策点弹出队列
但是如果之后遇到一个斜率比较小的直线(l)那么就不能转移到最优解
典型的例题是 洛谷P5785 [SDOI2012]任务安排
朴素的状态转移方程为
$ f[i] = f[j] + (sumc[i] - sumc[j]) * sumt[i] + s * (sumc[n] - sumc[j]);$
在这一道题中,作为斜率的 (sumt) 不再单调
但是 (x) 之仍然是单调的
所以我们可以用维护一个斜率单调的队列
每次在队列中二分答案
值得一提的是,出题人精心准备了卡精度的数据,所以我们要把二分时的除法改为乘法
代码
#include <cstdio>
#define rg register
inline int read() {
rg int x = 0, fh = 1;
rg char ch = getchar();
while (ch < '0' || ch > '9') {
if (ch == '-')
fh = -1;
ch = getchar();
}
while (ch >= '0' && ch <= '9') {
x = (x << 1) + (x << 3) + (ch ^ 48);
ch = getchar();
}
return x * fh;
}
typedef long long ll;
const int maxn = 1e6 + 5;
int t[maxn], c[maxn], n, s, q[maxn], head, tail;
ll f[maxn], sumt[maxn], sumc[maxn];
double Y(int i) { return (double)(f[i] - s * sumc[i]); }
double X(int i) { return (double)sumc[i]; }
double xl(int i, int j) {
if (X(i) == X(j)) {
if (Y(i) > Y(j))
return 1e18;
else
return -1e18;
}
return (double)(Y(i) - Y(j)) / (X(i) - X(j));
}
int ef(double now) {
int l = head, r = tail, mids;
while (l < r) {
mids = (l + r) >> 1;
if ((X(q[mids]) > X(q[mids + 1]) &&
Y(q[mids]) - Y(q[mids + 1]) < now * (X(q[mids]) - X(q[mids + 1]))) ||
(X(q[mids]) < X(q[mids + 1]) &&
(Y(q[mids + 1]) - Y(q[mids]) < now * (X(q[mids + 1]) - X(q[mids])))))
l = mids + 1;
else
r = mids;
}
return q[l];
}
int main() {
n = read(), s = read();
for (rg int i = 1; i <= n; i++) {
t[i] = read();
c[i] = read();
sumt[i] = sumt[i - 1] + t[i];
sumc[i] = sumc[i - 1] + c[i];
}
head = tail = 1;
for (rg int i = 1; i <= n; i++) {
rg int wz = ef((double)(sumt[i]));
f[i] = f[wz] + (sumc[i] - sumc[wz]) * sumt[i] + s * (sumc[n] - sumc[wz]);
while (head < tail && xl(i, q[tail - 1]) >= xl(i, q[tail])) tail--;
q[++tail] = i;
}
printf("%lld
", f[n]);
return 0;
}
扩展二、x不单调
没有找到 (x) 不单调但是 (k) 单调的题
但是却有一道 (x) 不单调 (k) 也不单调的题洛谷P4655 [CEOI2017]Building Bridges
对于这道题,我们同样可以写出最朴素的方程
(f[i]f[j]+(h[i]-h[j])*(h[i]-h[j])+sum[i-1]-sum[j])
神奇的一点是 (h) 数组既作为直线的斜率又作为 (x)
而且 (h) 并不单调
这是我们就不能再用单调队列去维护,因为凸包的形状在不断改变
本题可以用李超线段树或者平衡树动态维护凸包解决
但是还有一种 (CDQ) 分治离线处理的方法
直接人为地排出单调性,像普通单调队列那样维护就可以了
如果左侧斜率递增,并且左侧编号小于右侧,那么可以通过单调队列维护左侧的凸包来更新右侧答案
并且这样一定能够遍历出每个节点的所有决策点
代码
#include<cstdio>
#include<cstring>
#include<algorithm>
#include<cstring>
#include<cmath>
#define rg register
inline int read(){
rg int x=0,fh=1;
rg char ch=getchar();
while(ch<'0' || ch>'9'){
if(ch=='-') fh=-1;
ch=getchar();
}
while(ch>='0' && ch<='9'){
x=(x<<1)+(x<<3)+(ch^48);
ch=getchar();
}
return x*fh;
}
const int maxn=1e5+5;
const double eps=1e-6;
typedef long long ll;
int n,h[maxn],w[maxn];
ll f[maxn],sum[maxn];
double X(int id){
return (double)h[id];
}
double Y(int id){
return (double)(f[id]+1LL*h[id]*h[id]-sum[id]);
}
double xl(int i,int j){
if(std::fabs(X(i)-X(j))<eps){
if(std::fabs(Y(i)-Y(j))<eps) return 0;
else if(Y(i)>Y(j)) return 1e18;
else return -1e18;
} else {
return (Y(i)-Y(j))/(X(i)-X(j));
}
}
bool cmp(int aa,int bb){
return h[aa]<h[bb];
}
int tmp[maxn],p[maxn],q[maxn];
void solve(int l,int r){
if(l==r) return;
rg int mids=(l+r)>>1,head=l-1,tail=mids;
for(rg int i=l;i<=r;i++){
if(p[i]<=mids) tmp[++head]=p[i];
else tmp[++tail]=p[i];
}
for(rg int i=l;i<=r;i++){
p[i]=tmp[i];
}
solve(l,mids);
head=1,tail=0;
for(rg int i=l;i<=mids;i++){
while(head<tail && xl(p[i],q[tail-1])>=xl(p[i],q[tail])) tail--;
q[++tail]=p[i];
}
for(rg int i=mids+1;i<=r;i++){
while(head<tail && xl(q[head+1],q[head])<=2.0*h[p[i]]) head++;
f[p[i]]=std::min(f[p[i]],f[q[head]]+1LL*(h[p[i]]-h[q[head]])*(h[p[i]]-h[q[head]])+sum[p[i]-1]-sum[q[head]]);
}
solve(mids+1,r);
head=l,tail=mids+1;
for(rg int i=l;i<=r;i++){
if(tail>r || (head<=mids && h[p[head]]<h[p[tail]])) tmp[i]=p[head++];
else tmp[i]=p[tail++];
}
for(rg int i=l;i<=r;i++){
p[i]=tmp[i];
}
}
int main(){
memset(f,0x3f,sizeof(f));
n=read();
for(rg int i=1;i<=n;i++){
h[i]=read();
p[i]=i;
}
for(rg int i=1;i<=n;i++){
w[i]=read();
sum[i]=sum[i-1]+w[i];
}
std::sort(p+1,p+1+n,cmp);
f[1]=0;
solve(1,n);
printf("%lld
",f[n]);
return 0;
}
总结
虽然斜率优化看起来很难,但是熟能生巧,多打几遍就能掌握