开车前准备
检查手刹已刹住,如果没有刹住,拉上手刹
确认档位为空档,如果不是空档,拨至空档
调整座位,确认完整踩住离合时,左腿仍然能保持稍微弯曲,伸出双手放置方向盘正上方前沿,双手腕朝下,手腕到向盘正上方前沿
调整后视镜,确保左后视镜可看到左后轮地面接触点,尽量多看到其他地面区域;右后视镜能看到右轮4/5,基本能看到轮子后,尽量多看到其他地面区域
带上安全带
30CM在后视镜中看到的效果:两条边线宽(普通的边线宽为15CM)
启步
左脚贴离合上(脚趾端,整个脚的4/1接触离合踏板),右脚贴脚刹上,踩住离合和脚刹,挂1档,松开手刹(正常速度),正常速度松开脚刹,慢抬离合,车身抖动稳定离合,慢慢启步
打火方法(含熄火打火)
挂空档,拉手刹,踩住离合和脚刹,钥匙转至Loock,然后顺时针转至Start,1-2秒后松手
停车
急停
迅速踩住脚刹,再踩住离合(也可同时踩住脚刹和离合),挂空档,拉手刹,松离合,松脚刹(此时脚可不必放在离合及刹车上了)
缓停
踩住离合(正常速度),慢踩刹车,挂空档,拉手刹,松离合,松脚刹(此时脚可不必放在离合及刹车上了)
倒车入库
## 学习目的
目的是为了培养机动车驾驶人驾驶车辆在运动中,通过对档位、车速及方向的控制,操纵车辆由道路两侧正确的倒入车库。
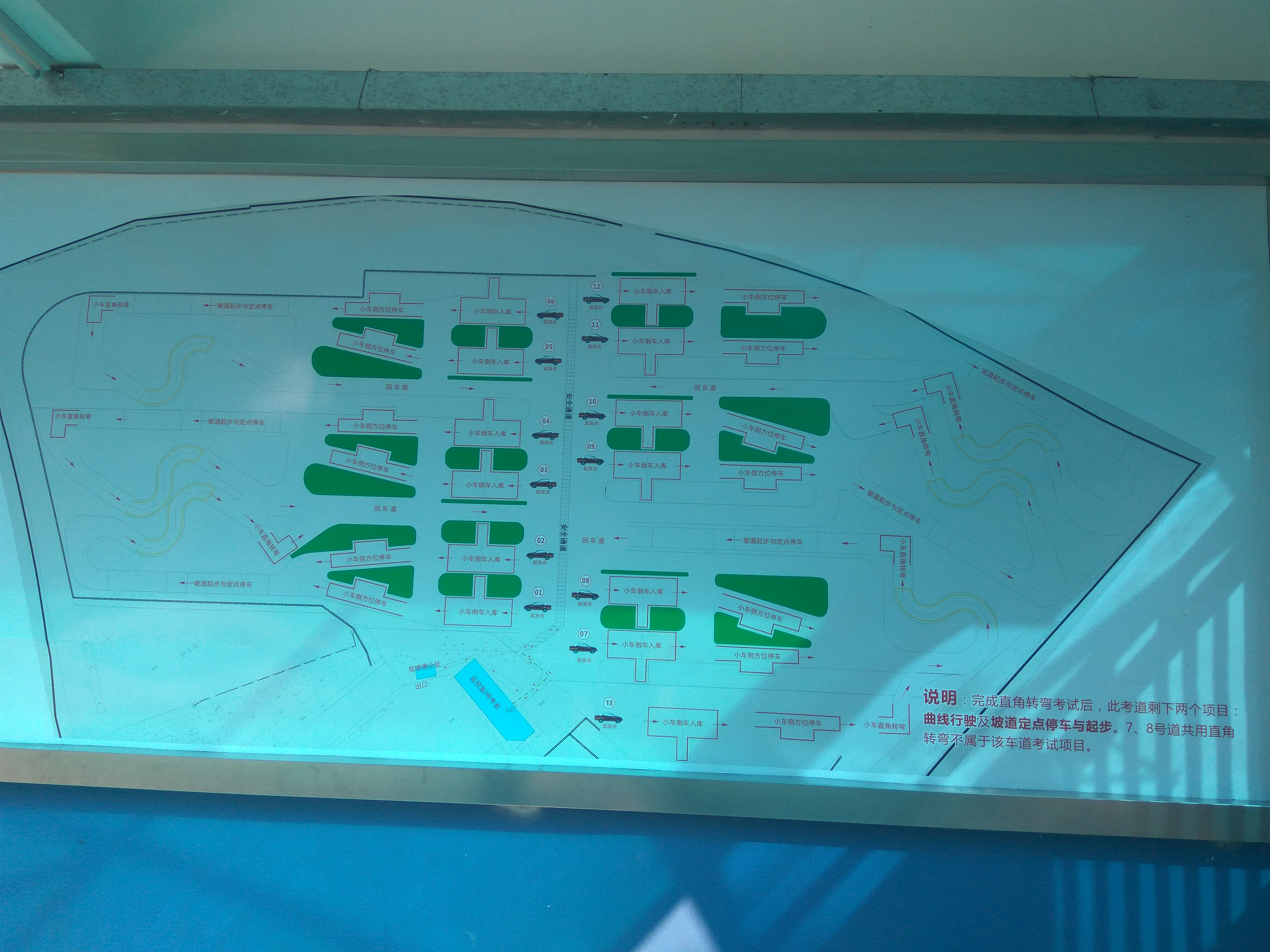
## 场地设置
## 操作要求
驾驶机动车,在进退途中不得停车,倒入车库停车,再前进库,从道路一端控制线,车身压控制线,倒入车库停车,再前进出库,向另一端驶过控制线后,倒入车库停车,最后驶出车库。
## 场地规格

## 操作要点
* 将车辆驶至车库右侧起点线上,摆正车身停车,控制车左侧与左边线1.5米左右,看到的效果左车窗离左边线30CM,30CM后在视镜中看到的视觉效果:两条车库边线宽就是30CM(普通的边线宽为15CM),或线内测边与后轮之间的距离一个拳头宽的样子
* 挂倒档倒车。
* 当车内左门把手顶端到起点线时(左后视镜调整按钮、右前窗开关 ),往右打一圈加90° ,操作要快速
* 看右后视镜中车身与库角的宽度,当宽度大于30cm时向右打死方向
* 当宽度小于30cm时先回半圈(约1秒),马上又打死,再继续看能否进,太窄又重复刚刚刚的两个操作
* 待车身入库后看车身与连线是否平行(可看左后轮与车库左边线是否平行),回正方向两边看,哪边宽往哪边调方向90°,然后回正
* 当左后视镜挡住下方车道边线时停车,因人坐高而定,有些要早些,有些要迟些。停车:先踩踩下离合,然后踩下刹车,也可同时踩下
* 挂要1档出库,单左门锁按钮与车库前边线对齐时左一圈+90°,也可侧头看肩与前边线对齐
* 膝盖过控制线时停
* 挂倒档,看左后视镜
* 通过左后轮弧线趋势判断左后轮与车库左边线距离
* 左后轮与车库左边线30CM,一个拳头的样子,则能进,若窄则右回90°到半圈,若宽,打死。当能进时再回到原来的左一圈+90°
* 看左后视镜,单左后轮与左边线平行时,马上回正,然后微调,最后回正
侧方停车
操作要点:
将车开到车库前方,车身后要过车库前边线,车身不能出前方控制线,车身摆正,右车身距离右边线最好控制在30-50cm,方便倒车时看车库前边线,挂倒档倒车,慢抬离合,控制车速,看右后视镜,右后轮与车库前边线在一条线上时,迅速右打死(如果右边距比较大时,可提前右打死,如果车几乎要停了可松点离合),看左后视镜,车库右后角刚露出时,迅速回正(如果回正晚了,可以回正后再左打0-90°),左后轮快压线时(可预测左后轮正后的大概位置,如果边距小了,右回点,90°-180°,感觉车身正后边距差不多30cm,,迅速左打死),左打死,车正停车
打左转向灯,挂1档,慢抬离合,车振稳住离合,前行,车头左边碰边线回车,车头中间碰边线右打一圈,看右后视镜,观察右后轮与车库前左角边距,小了左回一点,大了右打一些(或打死),车身快正时开始回正(左右露出车道左边线),车正回正。
场地规格
* 两边控制线长:19.6m
* 车位长(L),大型客车为1.5倍车长减1m,小型车辆为1.5倍车长加1m,其他车辆为1.5倍车长;L=4.473 * 1.5 + 1 =7.7095 (m)
* 车位宽(W),车宽加0.8m;W = 1.706 + 0.8 = 2.506 (m)
* 车道宽(w),1.5倍车宽加0.8m;w = 1.706 * 1.5 + 0.8=3.359 (m)
操作

直角转弯
学习目的
驾驶车辆在运动中,培养驾驶人在直角转弯路段驾驶车辆时,正确操纵转向,准确判断车辆内外轮差的实际驾驶能力。
场地设置
长大于等于1.5倍车身长度,考试路长大于等于1.5倍车身长度,路宽:小型车辆为考试用车的轴距加1米
操作要求
驾驶车辆按规定的线路行驶,由左向或由右向直角转弯,一次通过,中途不能停车,车轮不能碰轧车道边线
操作要点
用车头右大灯沿着车道右边线直行,看右后视镜,使车辆与边线保持30cm平行,等车头对齐前方的横线,往左两把打手方向转弯行驶,第一圈方向盘要打快些,边打边观察左后视
镜内左后轮位置,若左后轮快压线要往打方向,待矫正后迅速往左打死。车头即将回正时回正方向盘直走。
我的操作:
打左转向灯(灭了再开,直到报了直角考试开始),用车头右大灯沿着车道右边线直行(方向盘中心对准箭头竖线),看右后视镜,使车辆与边线保持30cm平行,车头碰边线,左打死,第一圈方向盘要打快些,边打边观察左后视镜内左后轮位置,若左后轮快压线要往打方向,待矫正后迅速往左打死。车头即将回正时回正方向盘直走。
坡道定点停车和起步
学习目的
目的是为了培养机动车驾驶人准确判断车辆的位置,正确使用制动,档位和离合器踏板以及控制车辆的实际驾驶能力,适应在上坡路段准确停车与平顺起步需要
场地设置
两路宽大于7米,坡度大于10%,坡长大于30M,
操作要求
驾驶车辆在坡道上的停车线停稳停车,前保险杠定于桩杆线上,不能超出前后控制线,然后再平稳起步,整个行驶过程中,车辆不能后遛,在车道上起步的时间不得低于5秒,不得超过30秒,
车右侧与边缘线保持平行,并距离边线30CM内。
操作要点
打左转向灯,挂一档,慢慢松离合,半离合起步,用车头右大灯沿着车道右边线直线行驶,当前轮上坡了,要稍微松多点离合,让车有充足动力爬坡,然后控制好离合慢慢爬坡
当车头挡住第一条虚线后,看左后镜下沿对中实线停车,先踩刹车后踩离合器,车辆停稳后打左转向灯,松离合,待转速指针下来两格后,松刹车起步走,同时向左打点方向然后直行
我的操作:
挂一档,慢慢松离合,半离合起步,用车头右往左3/1处沿着车道右边线直线行驶(方向盘中心对准前方右起第二块虚线的左3/1处,或停字的丁竖勾这),距右边线30cm以内并保证车身不碰线,当前轮上坡了,要稍微松多点离合,让车有充足动力爬坡,然后控制好离合慢慢爬坡,当车头挡住第一条虚线后,看左后镜下沿过两指宽,立即踩刹车后踩离合器,拉起手刹(脚刹仍不放),等2秒(响两次后)后松手刹,方向盘左打90°,慢松离合,待转速指针下来两格后车身抖动,稳住离合,慢松脚刹车起步走,若车有后溜趋势,再多放一点离合,待车快至中间时回正方向盘,调整车身前行。
曲线行驶
学习目的
培养驾驶人,掌握操纵转向,控制车辆曲线行驶的技能,了解和车辆转弯时前后轮的行驶轨迹、内轮差,对车身空间位置的判断和转向时机的把握。
场地设置
半径小型汽车取值7.5米,路宽,小型汽车取值3.5米,弧长8/3圆周
操作要求
驾驶车辆从弯道的一端前进驶入,以低档位从另一端驶出,行驶中转向,速度平稳,中途不能停车,车轮不能碰轧车道边线
操作要点
进曲线先靠右,待车头左大灯(车头左向右4/1)到车道右弧线时,往左打一圈,调整方向,使左大灯沿着车道右弧线行驶,同时保持左后轮与车道左弧线不少于20cm宽度
当车头左大灯到车道左弧线时,往右打一圈方向盘,车辆方向回正行驶,当左弧线碰车头中间时,往右打一圈,调整方向,使车头中间沿车道左弧线行驶,同时保持右后轮与车道右弧线不少于20cm宽度
出曲线时车辆靠左
我的操作:
整个项目1档慢速。
快要进入S曲线时控制车在道路中间靠右一点,车头右大灯位置碰道路右边线时,相左迅速打一圈,这时让右大灯沿着曲线右边走,有一点要出线时,及时调整方向盘,这里是比较灵活的。
走完第一个半圆时,继续保持前面的方向盘动作,当车头左大灯位置碰曲线道路左边线时,迅速回正,当车头正中间碰曲线左边线时,迅速右打一圈,然后让车头正中间沿着曲线走, 右要出线时,及时调整,这里是灵活的。
出曲线。左后轮与曲线左边尽头对齐时,回正。
附:
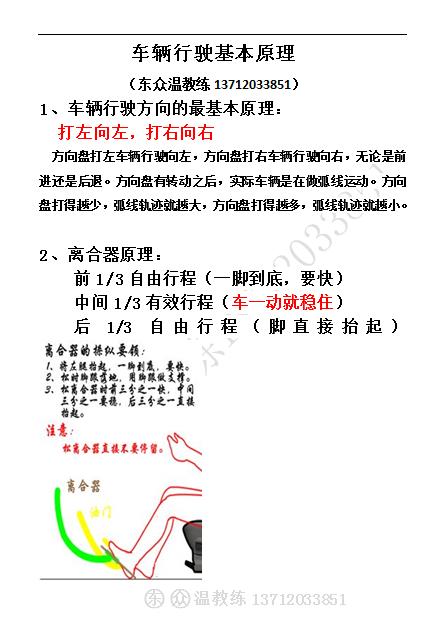
方向盘练习手法:

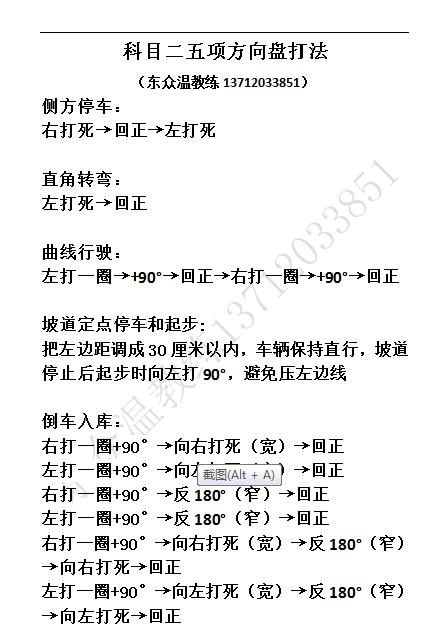
科目2五项方向盘打法: