from:https://www.cnblogs.com/wsine/p/5180778.html
运行环境
- Pyhton3
- numpy(科学计算包)
- matplotlib(画图所需,不画图可不必)
计算过程
st=>start: 开始 e=>end: 结束 op1=>operation: 读入数据 cond=>condition: 是否还有未分类数据 op2=>operation: 找一未分类点扩散 op3=>operation: 输出结果 st->op1->op2->cond cond(yes)->op2 cond(no)->op3->e
输入样例
/* 788points.txt */ 15.55,28.65 14.9,27.55 14.45,28.35 14.15,28.8 13.75,28.05 13.35,28.45 13,29.15 13.45,27.5 13.6,26.5 12.8,27.35 12.4,27.85 12.3,28.4 12.2,28.65 13.4,25.1 12.95,25.95
788points.txt完整文件:下载
代码实现
# -*- coding: utf-8 -*-
__author__ = 'Wsine'
import numpy as np
import matplotlib.pyplot as plt
import math
import time
UNCLASSIFIED = False
NOISE = 0
def loadDataSet(fileName, splitChar=' '):
"""
输入:文件名
输出:数据集
描述:从文件读入数据集
"""
dataSet = []
with open(fileName) as fr:
for line in fr.readlines():
curline = line.strip().split(splitChar)
fltline = list(map(float, curline))
dataSet.append(fltline)
return dataSet
def dist(a, b):
"""
输入:向量A, 向量B
输出:两个向量的欧式距离
"""
return math.sqrt(np.power(a - b, 2).sum())
def eps_neighbor(a, b, eps):
"""
输入:向量A, 向量B
输出:是否在eps范围内
"""
return dist(a, b) < eps
def region_query(data, pointId, eps):
"""
输入:数据集, 查询点id, 半径大小
输出:在eps范围内的点的id
"""
nPoints = data.shape[1]
seeds = []
for i in range(nPoints):
if eps_neighbor(data[:, pointId], data[:, i], eps):
seeds.append(i)
return seeds
def expand_cluster(data, clusterResult, pointId, clusterId, eps, minPts):
"""
输入:数据集, 分类结果, 待分类点id, 簇id, 半径大小, 最小点个数
输出:能否成功分类
"""
seeds = region_query(data, pointId, eps)
if len(seeds) < minPts: # 不满足minPts条件的为噪声点
clusterResult[pointId] = NOISE
return False
else:
clusterResult[pointId] = clusterId # 划分到该簇
for seedId in seeds:
clusterResult[seedId] = clusterId
while len(seeds) > 0: # 持续扩张
currentPoint = seeds[0]
queryResults = region_query(data, currentPoint, eps)
if len(queryResults) >= minPts:
for i in range(len(queryResults)):
resultPoint = queryResults[i]
if clusterResult[resultPoint] == UNCLASSIFIED:
seeds.append(resultPoint)
clusterResult[resultPoint] = clusterId
elif clusterResult[resultPoint] == NOISE:
clusterResult[resultPoint] = clusterId
seeds = seeds[1:]
return True
def dbscan(data, eps, minPts):
"""
输入:数据集, 半径大小, 最小点个数
输出:分类簇id
"""
clusterId = 1
nPoints = data.shape[1]
clusterResult = [UNCLASSIFIED] * nPoints
for pointId in range(nPoints):
point = data[:, pointId]
if clusterResult[pointId] == UNCLASSIFIED:
if expand_cluster(data, clusterResult, pointId, clusterId, eps, minPts):
clusterId = clusterId + 1
return clusterResult, clusterId - 1
def plotFeature(data, clusters, clusterNum):
nPoints = data.shape[1]
matClusters = np.mat(clusters).transpose()
fig = plt.figure()
scatterColors = ['black', 'blue', 'green', 'yellow', 'red', 'purple', 'orange', 'brown']
ax = fig.add_subplot(111)
for i in range(clusterNum + 1):
colorSytle = scatterColors[i % len(scatterColors)]
subCluster = data[:, np.nonzero(matClusters[:, 0].A == i)]
ax.scatter(subCluster[0, :].flatten().A[0], subCluster[1, :].flatten().A[0], c=colorSytle, s=50)
def main():
dataSet = loadDataSet('788points.txt', splitChar=',')
dataSet = np.mat(dataSet).transpose()
# print(dataSet)
clusters, clusterNum = dbscan(dataSet, 2, 15)
print("cluster Numbers = ", clusterNum)
# print(clusters)
plotFeature(dataSet, clusters, clusterNum)
if __name__ == '__main__':
start = time.clock()
main()
end = time.clock()
print('finish all in %s' % str(end - start))
plt.show()
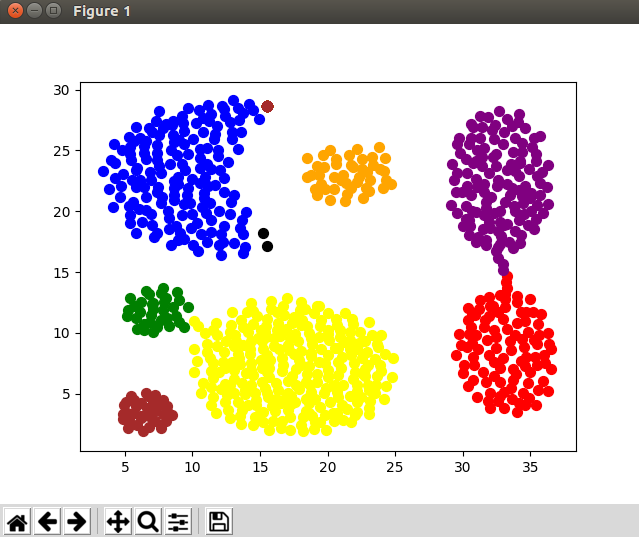
输出样例
cluster Numbers = 7 finish all in 32.712135628590794