
在HDevelop中
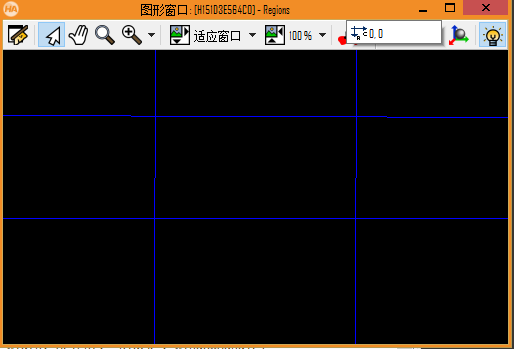
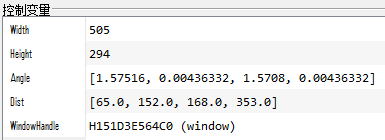
read_image (Image, 'D:/bb/tu/20.jpg') get_image_size (Image, Width, Height) sobel_amp (Image, EdgeAmplitude, 'sum_abs', 3) *计算边缘 threshold (EdgeAmplitude, Region, 50, 255) *通过阈值把边缘图像变成区域 connection (Region, ConnectedRegions) select_shape_std (ConnectedRegions, SelectedRegions, 'max_area', 1634) *选择外边缘 hough_lines (SelectedRegions, 4, 100, 5, 5, Angle, Dist) *通过霍夫变换寻找直线(数据),并以HNF格式返回 *参数1:待检测的边缘线条区域 *参数2:角度的步进值,步进大小为这个值的倒数。默认值:4 值列表:1,2,4,8 *参数3:要寻找的直线的阈值。默认值:100 典型值范围:2≤阈值 *参数4:Hough图像中两个最大值的最小距离(方向:角度)。【直线的最大角度】 * 默认值:5 典型值范围:0≤ AngleGap *参数5:Hough图像中两个最大值的最小距离(方向:距离)。【直线的最小角度】 * 默认值:5 典型值范围:0≤ 距离差 *参数6:返回找到直线的角度--弧度 *参数7:返回找到直线到原点的距离 dev_set_color('blue') gen_region_hline (Regions, Angle, Dist) *将霍夫变换找到的直线数据转化为区域 *参数1:输出区域集 *参数2:霍夫变换找到的角度 *参数3:霍夫变换找到的直线到原点的距离 dev_open_window (10, 10, Width, Height, 'black', WindowHandle) dev_display(Regions)
在QtCreator中
HObject ho_Image, ho_EdgeAmplitude, ho_Region;
HObject ho_ConnectedRegions, ho_SelectedRegions, ho_Regions;
HTuple hv_Width, hv_Height, hv_Angle, hv_Dist;
HTuple hv_WindowHandle;
ReadImage(&ho_Image, "D:/bb/tu/20.jpg"); GetImageSize(ho_Image, &hv_Width, &hv_Height); SobelAmp(ho_Image, &ho_EdgeAmplitude, "sum_abs", 3); //计算边缘 Threshold(ho_EdgeAmplitude, &ho_Region, 50, 255); //通过阈值把边缘图像变成区域 Connection(ho_Region, &ho_ConnectedRegions); SelectShapeStd(ho_ConnectedRegions, &ho_SelectedRegions, "max_area", 1634); //选择外边缘 HoughLines(ho_SelectedRegions, 4, 100, 5, 5, &hv_Angle, &hv_Dist); //通过霍夫变换寻找直线(数据),并以HNF格式返回 //参数1:待检测的边缘线条区域 //参数2:角度的步进值,步进大小为这个值的倒数。默认值:4 值列表:1,2,4,8 //参数3:要寻找的直线的阈值。默认值:100 典型值范围:2≤阈值 //参数4:Hough图像中两个最大值的最小距离(方向:角度)。【直线的最大角度】 // 默认值:5 典型值范围:0≤ AngleGap //参数5:Hough图像中两个最大值的最小距离(方向:距离)。【直线的最小角度】 // 默认值:5 典型值范围:0≤ 距离差 //参数6:返回找到直线的角度--弧度 //参数7:返回找到直线到原点的距离 if (HDevWindowStack::IsOpen()) SetColor(HDevWindowStack::GetActive(),"blue"); GenRegionHline(&ho_Regions, hv_Angle, hv_Dist); //将霍夫变换找到的直线数据转化为区域 //参数1:输出区域集 //参数2:霍夫变换找到的角度 //参数3:霍夫变换找到的直线到原点的距离 SetWindowAttr("background_color","black"); OpenWindow(10,10,hv_Width,hv_Height,0,"visible","",&hv_WindowHandle); HDevWindowStack::Push(hv_WindowHandle); if (HDevWindowStack::IsOpen()) DispObj(ho_Regions, HDevWindowStack::GetActive());
