
在HDevelop中
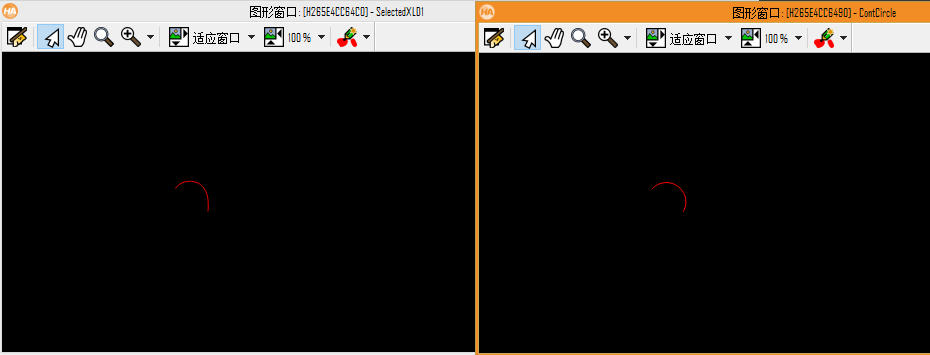
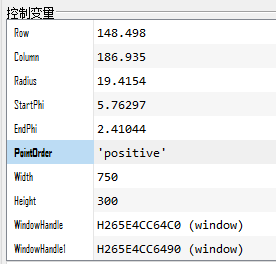
dev_close_window () read_image (Image, 'D:/bb/tu/8.jpg') rgb1_to_gray (Image, GrayImage) edges_sub_pix (GrayImage, Edges, 'canny', 1, 5, 10) *亚像素边缘 select_shape_xld (Edges, SelectedXLD, 'contlength', 'and', 136.87, 136.9) segment_contours_xld (SelectedXLD, ContoursSplit, 'lines_circles', 5, 4, 2) select_shape_xld (ContoursSplit, SelectedXLD1, 'contlength', 'and', 56, 58) fit_circle_contour_xld (SelectedXLD1, 'algebraic', -1, 0, 0, 3, 2, Row, Column, Radius, StartPhi, EndPhi, PointOrder) *对XLD轮廓做近似圆计算--拟合圆--获得圆数据 *参数1:输入xld轮廓 *参数2:圆的拟合算法 * 'ahuber' 对轮廓点进行加权,以减少异常值的影响 * 'algebraic' 这种方法使轮廓点和生成的圆之间的代数距离最小化 * 'atukey' 对轮廓点进行加权,并忽略异常值 * 'geohuber' 对轮廓点进行加权,以减少异常值的影响 * 'geometric' 使轮廓点和生成的圆之间的几何距离最小化。距离度量在统计上是最优的,但需要更多的计算时间。 * 如果轮廓点被噪声严重扭曲,建议使用此选项 * 'geotukey' 对轮廓点进行加权,并忽略异常值 *参数8:Row圆中心的行坐标 *参数9:Column圆中心的列坐标 *参数10:Radius圆的半径 *参数11:StartPhi起点的角度 *参数12:EndPhi终点的角度 *参数13:PointOrder沿边界的点顺序( 'negative'负序, 'positive'正序) *注意:拟合时参数1只能包含一条xld gen_circle_contour_xld (ContCircle, Row, Column, Radius, StartPhi, EndPhi, PointOrder, 1) *创建圆或圆弧的XLD轮廓 *参数1:输出轮廓 *参数2:输入圆心的行坐标 *参数3:输入圆心列坐标 *参数4:输入圆的半径 *参数5:输入起始点角度 *参数6:输入结束点的角度 *参数7:输入沿边界的点序( 'negative'负序, 'positive'正序) *参数8:输入相邻轮廓点之间的距离(Resolution >= 0.00001) get_image_size (GrayImage, Width, Height) dev_open_window(10,10,Width, Height,'black',WindowHandle) dev_display(SelectedXLD1) dev_open_window(10,10,Width, Height,'black',WindowHandle1) dev_display(ContCircle)
在QtCreator中
HObject ho_Image, ho_GrayImage, ho_Edges, ho_SelectedXLD;
HObject ho_ContoursSplit, ho_SelectedXLD1, ho_ContCircle;
HTuple hv_Row, hv_Column, hv_Radius, hv_StartPhi;
HTuple hv_EndPhi, hv_PointOrder, hv_Width, hv_Height, hv_WindowHandle;
HTuple hv_WindowHandle1;
ReadImage(&ho_Image, "D:/bb/tu/8.jpg"); Rgb1ToGray(ho_Image, &ho_GrayImage); EdgesSubPix(ho_GrayImage, &ho_Edges, "canny", 1, 5, 10); //亚像素边缘 SelectShapeXld(ho_Edges, &ho_SelectedXLD, "contlength", "and", 136.87, 136.9); SegmentContoursXld(ho_SelectedXLD, &ho_ContoursSplit, "lines_circles", 5, 4, 2); SelectShapeXld(ho_ContoursSplit, &ho_SelectedXLD1, "contlength", "and", 56, 58); FitCircleContourXld(ho_SelectedXLD1, "algebraic", -1, 0, 0, 3, 2, &hv_Row, &hv_Column, &hv_Radius, &hv_StartPhi, &hv_EndPhi, &hv_PointOrder); //对XLD轮廓做近似圆计算--拟合圆--获得圆数据 //参数1:输入xld轮廓 //参数2:圆的拟合算法 // 'ahuber' 对轮廓点进行加权,以减少异常值的影响 // 'algebraic' 这种方法使轮廓点和生成的圆之间的代数距离最小化 // 'atukey' 对轮廓点进行加权,并忽略异常值 // 'geohuber' 对轮廓点进行加权,以减少异常值的影响 // 'geometric' 使轮廓点和生成的圆之间的几何距离最小化。距离度量在统计上是最优的,但需要更多的计算时间。 // 如果轮廓点被噪声严重扭曲,建议使用此选项 // 'geotukey' 对轮廓点进行加权,并忽略异常值 //参数8:Row圆中心的行坐标 //参数9:Column圆中心的列坐标 //参数10:Radius圆的半径 //参数11:StartPhi起点的角度 //参数12:EndPhi终点的角度 //参数13:PointOrder沿边界的点顺序( 'negative'负序, 'positive'正序) //注意:拟合时参数1只能包含一条xld GenCircleContourXld(&ho_ContCircle, hv_Row, hv_Column, hv_Radius, hv_StartPhi, hv_EndPhi, hv_PointOrder, 1); //创建圆或圆弧的XLD轮廓 //参数1:输出轮廓 //参数2:输入圆心的行坐标 //参数3:输入圆心列坐标 //参数4:输入圆的半径 //参数5:输入起始点角度 //参数6:输入结束点的角度 //参数7:输入沿边界的点序( 'negative'负序, 'positive'正序) //参数8:输入相邻轮廓点之间的距离(Resolution >= 0.00001) GetImageSize(ho_GrayImage, &hv_Width, &hv_Height); SetWindowAttr("background_color","black"); OpenWindow(10,10,hv_Width,hv_Height,0,"visible","",&hv_WindowHandle); HDevWindowStack::Push(hv_WindowHandle); if (HDevWindowStack::IsOpen()) DispObj(ho_SelectedXLD1, HDevWindowStack::GetActive()); SetWindowAttr("background_color","black"); OpenWindow(10,10,hv_Width,hv_Height,0,"visible","",&hv_WindowHandle1); HDevWindowStack::Push(hv_WindowHandle1); if (HDevWindowStack::IsOpen()) DispObj(ho_ContCircle, HDevWindowStack::GetActive());
