逆矩阵定义:看 https://www.cnblogs.com/liming19680104/p/15631550.html
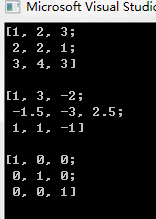
#include<opencv2/opencv.hpp> #include<iostream> #include <vector> int main(int argc, char** argv) { cv::Mat A = (cv::Mat_<double>(3, 3) << 1, 2, 3, 2, 2, 1, 3, 4, 3); std::cerr << A << std::endl << std::endl; cv::Mat B; cv::invert(A, B); //求逆矩阵 //参数1:输入,浮点型(32位或者64位)的M×N的矩阵,当参数3的使用方法 // 为DECOMP_CHOLESKY DECOMP_LU DECOMP_EIG时函数功能为求逆,此时需保证M=N //参数2:输出,与输入矩阵类型一致的N×M的矩阵 //参数3:提供4种可选择的方法: // DECOMP_CHOLESKY(基于CHOLESKY分解的方法) // DECOMP_LU(基于LU分解的方法) // DECOMP_EIG(基于特征值分解的方法) // DECOMP_SVD(基于奇异值分解的方法) std::cerr << B << std::endl << std::endl; cv::Mat C; C = A * B; std::cerr << C << std::endl << std::endl; cv::waitKey(0); return 0; }