1,方向余弦阵
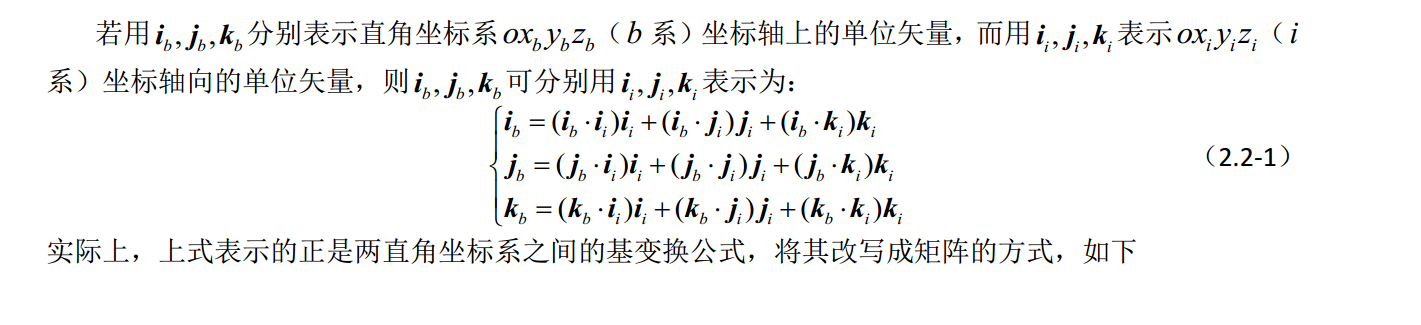
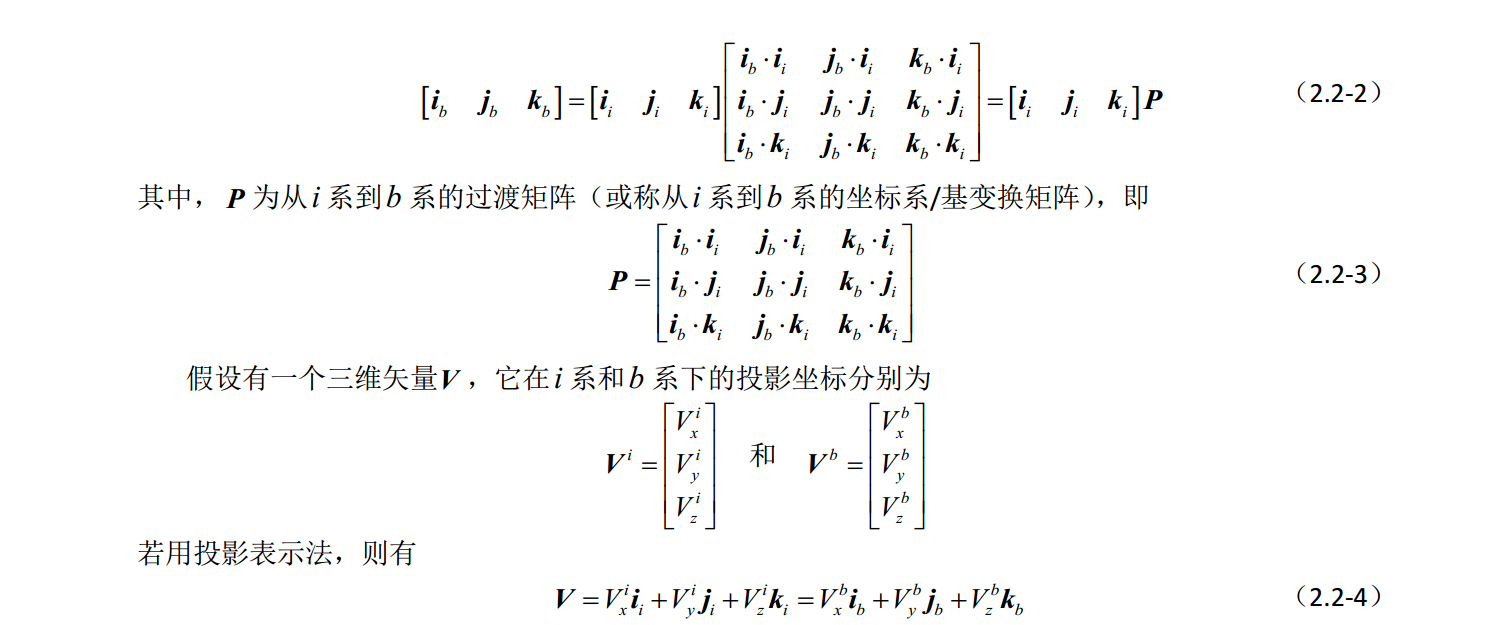
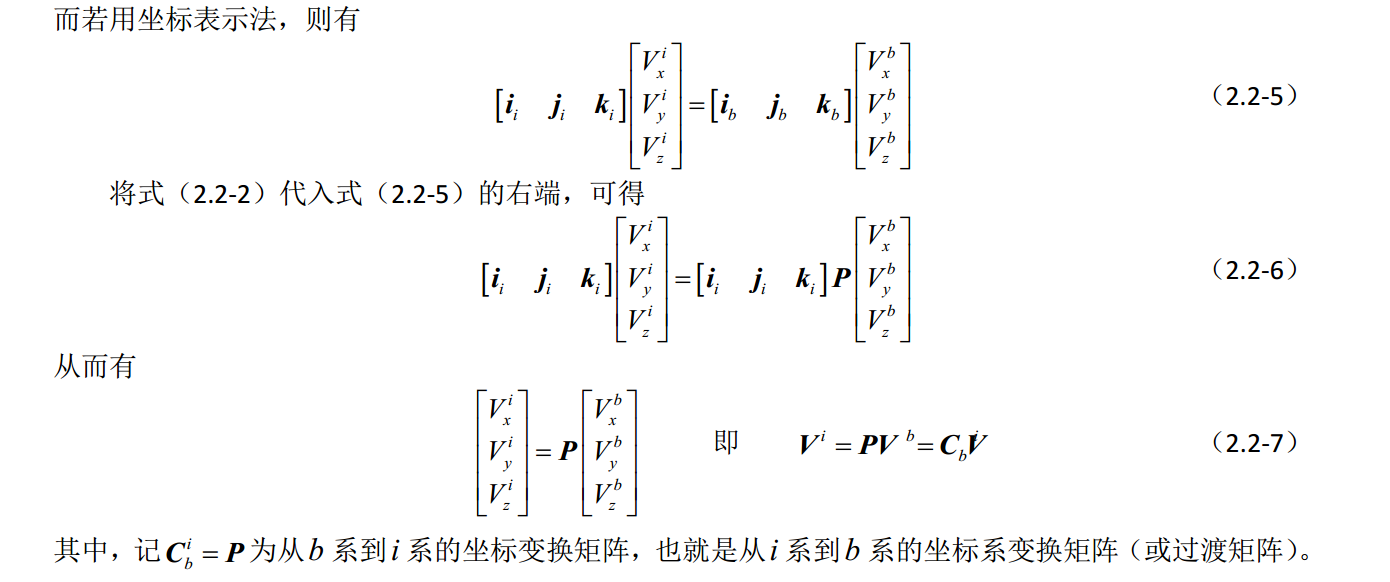
坐标变换矩阵的每一个元素都是i系某个坐标系与b系坐标系的夹角的余弦。这个转换方法也同样适用于二维坐标转换。只不过二维坐标转换不仅需要考虑旋转,同时也需要考虑坐标的平移变换。

如上图所示,表示只进行旋转的时候二维坐标转换公式。此时旋转矩阵表示为P=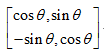
2,欧拉角
经典的欧拉角有多种定义,下面只介绍内旋方式的定义。

所以,欧拉角只是绕着两个本机坐标轴在旋转,第三个坐标轴就没有用到。
之后提出 Tait-Bryan 角

经常说的yaw,pitch,roll就是用Tait-Bryan角实现的。并且yaw指的是绕z轴旋转的角度值,pitch指的是绕y轴旋转的角度值,roll指的是绕x轴旋转的角度值。
通常yaw角也用ψ表示,pitch角也用θ表示,roll角也用φ表示。并且yaw和roll的范围是[-∏,∏],pitch的范围是[-Π/2,Π/2].
不同的旋转组合虽然可以得到相同的坐标转换结果,但是得到的roll,pitch,yaw是不同的。
按照x,y,z顺序旋转得到由roll,pitch,yaw表示的方向余弦如下
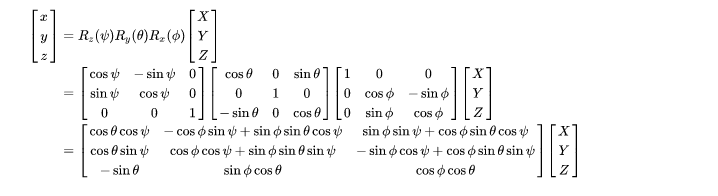
由方向余弦得到roll pitch yaw的表达式如下
roll(φ)=atan2(R(3,2),R(3,3));
pitch(θ)=-asin(R(3,1));
yaw(ψ)=atan2(R(2,1),R(1,1));
3,四元数
四元数的理解可以参考http://www.qiujiawei.com/understanding-quaternions/(理解四元数,比较通俗的解释了四元数)
推导请查看秦永元版惯性导航中相关章节。
四元数的几何意义:实部表示旋转角度的1/2的余弦值。虚部表示旋转轴与旋转角度的1/2的正弦值的乘积。
四元数得到方向余弦矩阵的表达式
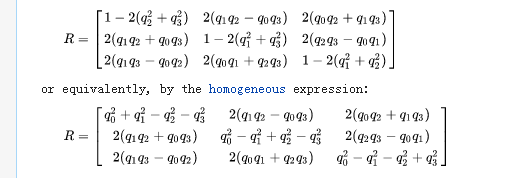
上式和下式是相同的,因为四元数的平方和等于1。
由方向余弦阵到四元数的转换可以参考以下matlab程序
function q=dcm2q(R)
T = 1 + R(1,1) + R(2,2) + R(3,3);
if T > 10^-8
S = 0.5 / sqrt(T);
qw = 0.25 / S;
qx = ( R(3,2) - R(2,3) ) * S;
qy = ( R(1,3) - R(3,1) ) * S;
qz = ( R(2,1) - R(1,2) ) * S;
else
if (R(1,1) > R(2,2)) && (R(1,1) > R(3,3))
S = sqrt( 1 + R(1,1) - R(2,2) - R(3,3)) * 2; % S=4*qx
qw = (R(3,2) - R(2,3)) / S;
qx = 0.25 * S;
qy = (R(1,2) + R(2,1)) / S;
qz = (R(1,3) + R(3,1)) / S;
elseif (R(2,2) > R(3,3))
S = sqrt( 1 + R(2,2) - R(1,1) - R(3,3) ) * 2; %S=4*qy
qw = (R(1,3) - R(3,1)) / S;
qx = (R(1,2) + R(2,1)) / S;
qy = 0.25 * S;
qz = (R(2,3) + R(3,2)) / S;
else
S = sqrt( 1 + R(3,3) - R(1,1) - R(2,2) ) * 2; % S=4*qz
qw = (R(2,1) - R(1,2)) / S;
qx = (R(1,3) + R(3,1)) / S;
qy = (R(2,3) + R(3,2)) / S;
qz = 0.25 * S;
end
end
q = [qx qy qz qw]';
end
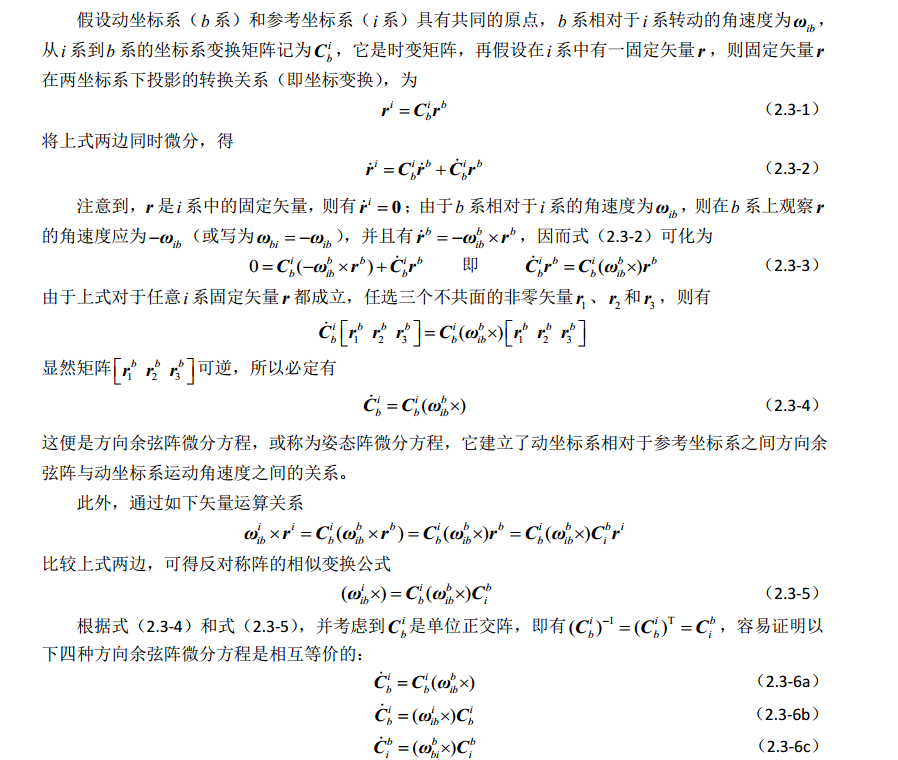
4,方向余弦阵的微分
5,四元数微分
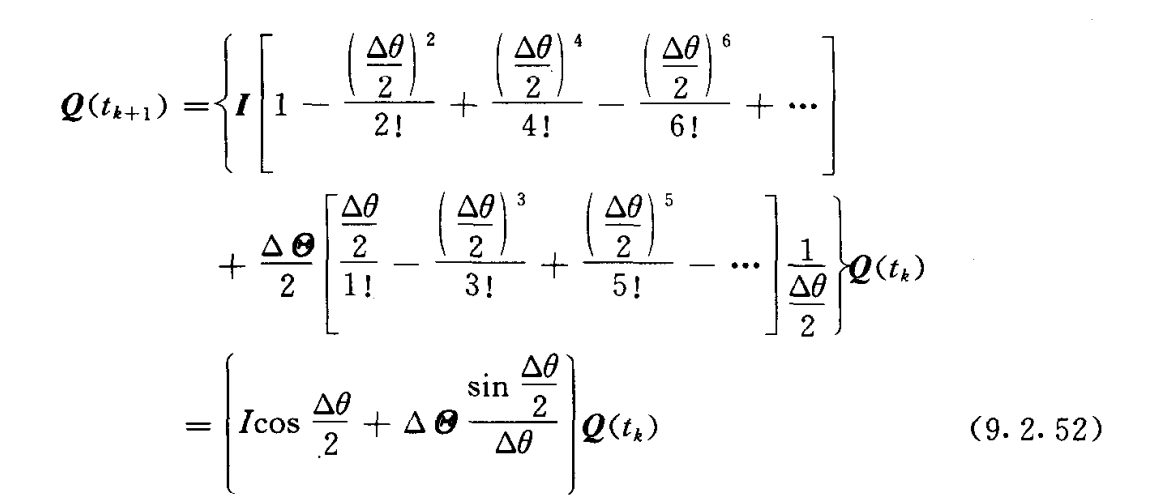
详细的推导参看秦永元版惯性导航