一、SIFT算法介绍
1.SIFT算法简介:SIFT(Scale-invariant feature transform)是一种检测局部特征的算法,该算法通过求一幅图中的特征点(interest points,or corner points)及其有关scale 和 orientation 的描述子得到特征并进行图像特征点匹配,SIFT特征不只具有尺度不变性,即使改变旋转角度,图像亮度或拍摄视角,仍然能够得到好的检测效果。
2.算法描述:
(1) 构建尺度空间
这是一个初始化操作,尺度空间理论目的是模拟图像数据的多尺度特征。
高斯卷积核是实现尺度变换的唯一线性核,于是一副二维图像的尺度空间定义为:

其中 G(x,y,σ) 是尺度可变高斯函数 
(x,y)是空间坐标,是尺度坐标。σ大小决定图像的平滑程度,大尺度对应图像的概貌特征,小尺度对应图像的细节特征。大的σ值对应粗糙尺度(低分辨率),反之,对应精细尺度(高分辨率)。为了有效的在尺度空间检测到稳定的关键点,提出了高斯差分尺度空间(DOG scale-space)。利用不同尺度的高斯差分核与图像卷积生成。

下图所示不同σ下图像尺度空间:
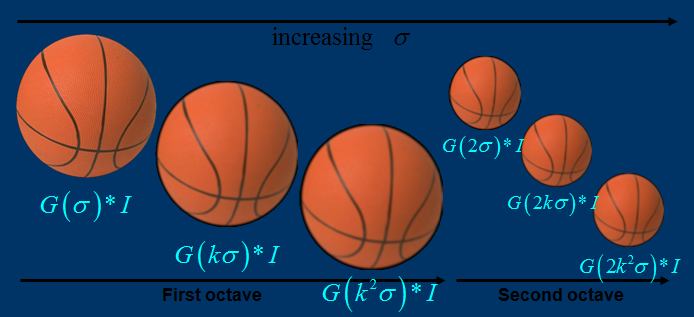
关于尺度空间的理解说明:2kσ中的2是必须的,尺度空间是连续的。在 Lowe的论文中 ,将第0层的初始尺度定为1.6(最模糊),图片的初始尺度定为0.5(最清晰). 在检测极值点前对原始图像的高斯平滑以致图像丢失高频信息,所以 Lowe 建议在建立尺度空间前首先对原始图像长宽扩展一倍,以保留原始图像信息,增加特征点数量。尺度越大图像越模糊。
图像金字塔的建立:对于一幅图像I,建立其在不同尺度(scale)的图像,也成为子八度(octave),这是为了scale-invariant,也就是在任何尺度都能够有对应的特征点,第一个子八度的scale为原图大小,后面每个octave为上一个octave降采样的结果,即原图的1/4(长宽分别减半),构成下一个子八度(高一层金字塔)。

尺度空间的所有取值,i为octave的塔数(第几个塔),s为每塔层数
由图片size决定建几个塔,每塔几层图像(S一般为3-5层)。0塔的第0层是原始图像(或你double后的图像),往上每一层是对其下一层进行Laplacian变换(高斯卷积,其中σ值渐大,例如可以是σ, k*σ, k*k*σ…),直观上看来越往上图片越模糊。塔间的图片是降采样关系,例如1塔的第0层可以由0塔的第3层down sample得到,然后进行与0塔类似的高斯卷积操作。
(2) LoG近似DoG找到关键点<检测DOG尺度空间极值点>
为了寻找尺度空间的极值点,每一个采样点要和它所有的相邻点比较,看其是否比它的图像域和尺度域的相邻点大或者小。如图所示,中间的检测点和它同尺度的8个相邻点和上下相邻尺度对应的9×2个点共26个点比较,以确保在尺度空间和二维图像空间都检测到极值点。 一个点如果在DOG尺度空间本层以及上下两层的26个领域中是最大或最小值时,就认为该点是图像在该尺度下的一个特征点,如图所示。

同一组中的相邻尺度(由于k的取值关系,肯定是上下层)之间进行寻找

s=3的情况
在极值比较的过程中,每一组图像的首末两层是无法进行极值比较的,为了满足尺度变化的连续性
,我们在每一组图像的顶层继续用高斯模糊生成了 3 幅图像,高斯金字塔有每组S+3层图像。DOG金字塔每组有S+2层图像.
(3) 除去不好的特征点
这一步本质上要去掉DoG局部曲率非常不对称的像素。
通过拟和三维二次函数以精确确定关键点的位置和尺度(达到亚像素精度),同时去除低对比度的关键点和不稳定的边缘响应点(因为DoG算子会产生较强的边缘响应),以增强匹配稳定性、提高抗噪声能力,在这里使用近似Harris Corner检测器。
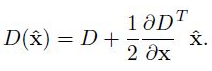
①空间尺度函数泰勒展开式如下:![]()
对上式求导,并令其为0,得到精确的位置, 得
②在已经检测到的特征点中,要去掉低对比度的特征点和不稳定的边缘响应点。去除低对比度的点:把公式(2)代入公式(1),即在DoG Space的极值点处D(x)取值,只取前两项可得:
若 
该特征点就保留下来,否则丢弃。
③边缘响应的去除
一个定义不好的高斯差分算子的极值在横跨边缘的地方有较大的主曲率,而在垂直边缘的方向有较小的主曲率。主曲率通过一个2×2 的Hessian矩阵H求出:

导数由采样点相邻差估计得到。
D的主曲率和H的特征值成正比,令α为较大特征值,β为较小的特征值,则
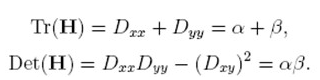
令α=γβ,则
(r + 1)2/r的值在两个特征值相等的时候最小,随着r的增大而增大,因此,为了检测主曲率是否在某域值r下,只需检测
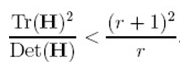
if (α+β)/ αβ> (r+1)2/r, throw it out. 在Lowe的文章中,取r=10。
(4)给特征点赋值一个128维方向参数
上一步中确定了每幅图中的特征点,为每个特征点计算一个方向,依照这个方向做进一步的计算, 利用关键点邻域像素的梯度方向分布特性为每个关键点指定方向参数,使算子具备旋转不变性。

为(x,y)处梯度的模值和方向公式。其中L所用的尺度为每个关键点各自所在的尺度。至此,图像的关键点已经检测完毕,每个关键点有三个信息:位置,所处尺度、方向,由此可以确定一个SIFT特征区域。
梯度直方图的范围是0~360度,其中每10度一个柱,总共36个柱。随着距
中心点越远的领域其对直方图的贡献也响应减小.Lowe论文中还提到要使用高斯函数对直方图进行平滑,减少突变的影响。
在实际计算时,我们在以关键点为中心的邻域窗口内采样,并用直方图统计邻域像素的梯度方向。梯度直方图的范围是0~360度,其中每45度一个柱,总共8个柱, 或者每10度一个柱,总共36个柱。Lowe论文中还提到要使用高斯函数对直方图进行平滑,减少突变的影响。直方图的峰值则代表了该关键点处邻域梯度的主方向,即作为该关键点的方向。
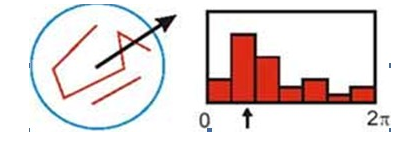
直方图中的峰值就是主方向,其他的达到最大值80%的方向可作为辅助方向
由梯度方向直方图确定主梯度方向
该步中将建立所有scale中特征点的描述子(128维)
关键点描述子的生成步骤
通过对关键点周围图像区域分块,计算块内梯度直方图,生成具有独特性的向量,这个向量是该区域图像信息的一种抽象,具有唯一性。
(5)关键点描述子的生成
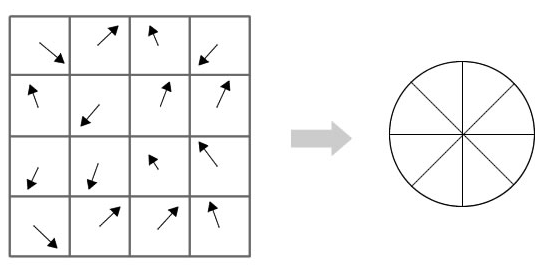
首先将坐标轴旋转为关键点的方向,以确保旋转不变性。以关键点为中心取8×8的窗口。
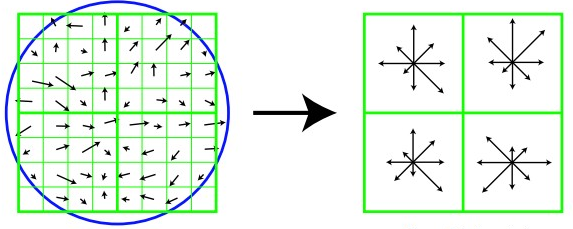
Figure.16*16的图中其中1/4的特征点梯度方向及scale,右图为其加权到8个主方向后的效果。
图左部分的中央为当前关键点的位置,每个小格代表关键点邻域所在尺度空间的一个像素,利用公式求得每个像素的梯度幅值与梯度方向,箭头方向代表该像素的梯度方向,箭头长度代表梯度模值,然后用高斯窗口对其进行加权运算。
图中蓝色的圈代表高斯加权的范围(越靠近关键点的像素梯度方向信息贡献越大)。然后在每4×4的小块上计算8个方向的梯度方向直方图,绘制每个梯度方向的累加值,即可形成一个种子点,如图右部分示。此图中一个关键点由2×2共4个种子点组成,每个种子点有8个方向向量信息。这种邻域方向性信息联合的思想增强了算法抗噪声的能力,同时对于含有定位误差的特征匹配也提供了较好的容错性。
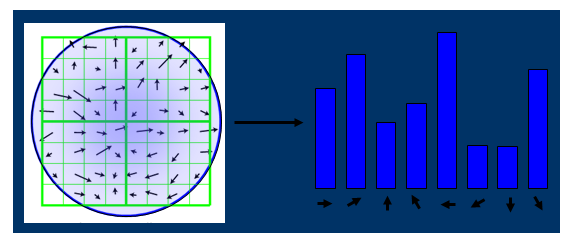
计算keypoint周围的16*16的window中每一个像素的梯度,而且使用高斯下降函数降低远离中心的权重。
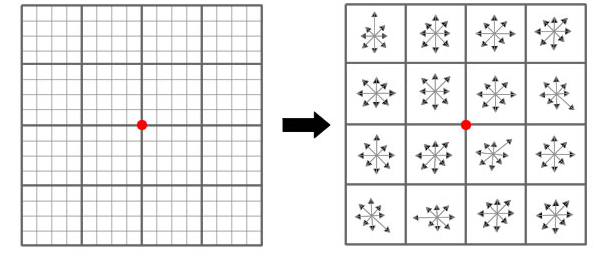
在每个4*4的1/16象限中,通过加权梯度值加到直方图8个方向区间中的一个,计算出一个梯度方向直方图。
这样就可以对每个feature形成一个4*4*8=128维的描述子,每一维都可以表示4*4个格子中一个的scale/orientation. 将这个向量归一化之后,就进一步去除了光照的影响。
(6)根据SIFT进行Match
生成了A、B两幅图的描述子,(分别是k1*128维和k2*128维),就将两图中各个scale(所有scale)的描述子进行匹配,匹配上128维即可表示两个特征点match上了。
实际计算过程中,为了增强匹配的稳健性,Lowe建议对每个关键点使用4×4共16个种子点来描述,这样对于一个关键点就可以产生128个数据,即最终形成128维的SIFT特征向量。此时SIFT特征向量已经去除了尺度变化、旋转等几何变形因素的影响,再继续将特征向量的长度归一化,则可以进一步去除光照变化的影响。 当两幅图像的SIFT特征向量生成后,下一步我们采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。取图像1中的某个关键点,并找出其与图像2中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离少于某个比例阈值,则接受这一对匹配点。降低这个比例阈值,SIFT匹配点数目会减少,但更加稳定。为了排除因为图像遮挡和背景混乱而产生的无匹配关系的关键点,Lowe提出了比较最近邻距离与次近邻距离的方法,距离比率ratio小于某个阈值的认为是正确匹配。因为对于错误匹配,由于特征空间的高维性,相似的距离可能有大量其他的错误匹配,从而它的ratio值比较高。Lowe推荐ratio的阈值为0.8。但作者对大量任意存在尺度、旋转和亮度变化的两幅图片进行匹配,结果表明ratio取值在0. 4~0. 6之间最佳,小于0. 4的很少有匹配点,大于0. 6的则存在大量错误匹配点。(如果这个地方你要改进,最好给出一个匹配率和ration之间的关系图,这样才有说服力)作者建议ratio的取值原则如下:
ratio=0. 4 对于准确度要求高的匹配;
ratio=0. 6 对于匹配点数目要求比较多的匹配;
ratio=0. 5 一般情况下。
也可按如下原则:当最近邻距离<200时ratio=0. 6,反之ratio=0. 4。ratio的取值策略能排分错误匹配点。
当两幅图像的SIFT特征向量生成后,下一步我们采用关键点特征向量的欧式距离来作为两幅图像中关键点的相似性判定度量。取图像1中的某个关键点,并找出其与图像2中欧式距离最近的前两个关键点,在这两个关键点中,如果最近的距离除以次近的距离少于某个比例阈值,则接受这一对匹配点。降低这个比例阈值,SIFT匹配点数目会减少,但更加稳定。
二、SIFT特征提取
1.源代码

# -*- coding: utf-8 -*-
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
from PCV.localdescriptors import harris
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:windowsfontsSimSun.ttc", size=14)
imname = 'b9.jpg'
im = array(Image.open(imname).convert('L'))
sift.process_image(imname, 'b9.sift')
l1, d1 = sift.read_features_from_file('b9.sift')
figure()
gray()
subplot(131)
sift.plot_features(im, l1, circle=False)
title(u'SIFT特征', fontproperties=font)
show()
2.部分图片实验结果如下



3.SIFT算法和Harris算法比较
实验结果

小结:由实验结果可以看出,sift算法检测出图片的特征更多,运行时,sift算法的效率远高与harris算法。两个算法由于选择特征点的方法不同,而显示出了差异。
三、图片SIFT特征匹配
1.源代码
# -*- coding: utf-8 -*-
#SIFT算法
from PIL import Image
from pylab import *
import sys
from PCV.localdescriptors import sift
im1f = 'C:/Users/LE/PycharmProjects/untitled/b5.jpg'
im2f = 'C:/Users/LE/PycharmProjects/untitled/b12.jpg'
im1 = array(Image.open(im1f).convert('L'))
im2 = array(Image.open(im2f).convert('L'))
sift.process_image(im1f, 'out_sift_1.txt')
l1, d1 = sift.read_features_from_file('out_sift_1.txt')
figure()
gray()
subplot(121)
sift.plot_features(im1, l1, circle=False)
sift.process_image(im2f, 'out_sift_2.txt')
l2, d2 = sift.read_features_from_file('out_sift_2.txt')
subplot(122)
sift.plot_features(im2, l2, circle=False)
#matches = sift.match(d1, d2)
matches = sift.match_twosided(d1, d2)
print ('{} matches'.format(len(matches.nonzero()[0])))
figure()
gray()
sift.plot_matches(im1, im2, l1, l2, matches, show_below=True)
show()
2.实验结果
(1)旋转图和正面图

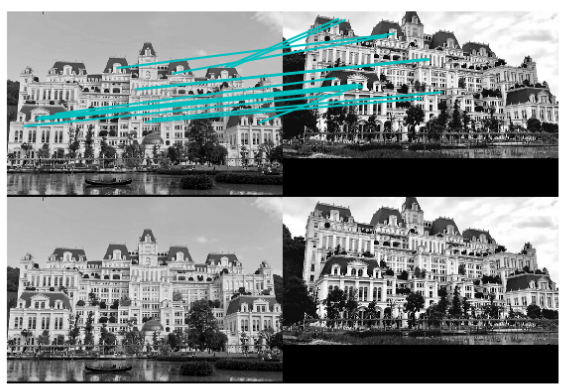
(2)正面图和侧面图
(3)不同场景匹配

小结:由实验结果可以看出,实验(1)(2)是在同一场景下进行,无论任何角度都可以进行匹配,是因为SIFT算法具有尺度和旋转不变性,而实验(3)是在不同场景下进行,明显看出不能匹配,这也证明了sift算法的可行性和有效性。
三、SIFT图片数据集检索匹配
1.源代码
from PIL import Image
from pylab import *
from PCV.localdescriptors import sift
import matplotlib.pyplot as plt
im1f = 'C:/Users/LE/PycharmProjects/untitled/12.jpg'
im1 = array(Image.open(im1f))
sift.process_image(im1f, 'out_sift_1.txt')
l1, d1 = sift.read_features_from_file('out_sift_1.txt')
arr=[]
arrHash = {}
for i in range(1,15):
im2f = (r'C:/Users/LE/PycharmProjects/untitled/'+str(i)+'.jpg')
im2 = array(Image.open(im2f))
sift.process_image(im2f, 'out_sift_2.txt')
l2, d2 = sift.read_features_from_file('out_sift_2.txt')
matches = sift.match_twosided(d1, d2)
length=len(matches.nonzero()[0])
length=int(length)
arr.append(length)
arrHash[length]=im2f
arr.sort()
arr=arr[::-1]
arr=arr[:3]
i=0
plt.figure(figsize=(5,12))
for item in arr:
if(arrHash.get(item)!=None):
img=arrHash.get(item)
im1 = array(Image.open(img))
ax=plt.subplot(511 + i)
ax.set_title('{} matches'.format(item))
plt.axis('off')
imshow(im1)
i = i + 1
plt.show()
2.实验结果
检索的图片

运行结果
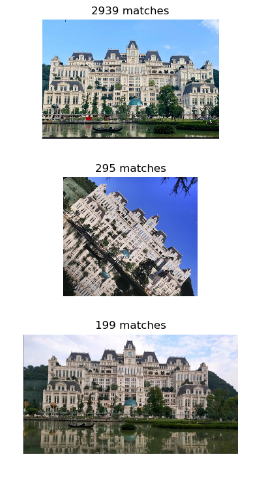
小结:由实验结果可以看出,sift算法不受图片角度,大小的影响,仍有较高的检测效率,具有非常强的稳健性。
四、匹配地理标记图像
1.数据集

2.源代码
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import sift
from PCV.tools import imtools
import pydot
""" This is the example graph illustration of matching images from Figure 2-10.
To download the images, see ch2_download_panoramio.py."""
#download_path = "panoimages" # set this to the path where you downloaded the panoramio images
#path = "/FULLPATH/panoimages/" # path to save thumbnails (pydot needs the full system path)
download_path = "C:UsersLEPycharmProjectsuntitled" # set this to the path where you downloaded the panoramio images
path = "C:UsersLEPycharmProjectsuntitled" # path to save thumbnails (pydot needs the full system path)
imlist = imtools.get_imlist(download_path)
nbr_images = len(imlist)
featlist = [imname[:-3] + 'sift' for imname in imlist]
for i, imname in enumerate(imlist):
sift.process_image(imname, featlist[i])
matchscores = zeros((nbr_images, nbr_images))
for i in range(nbr_images):
for j in range(i, nbr_images): # only compute upper triangle
print('comparing ', imlist[i], imlist[j])
l1, d1 = sift.read_features_from_file(featlist[i])
l2, d2 = sift.read_features_from_file(featlist[j])
matches = sift.match_twosided(d1, d2)
nbr_matches = sum(matches > 0)
print('number of matches = ', nbr_matches)
matchscores[i, j] = nbr_matches
print("The match scores is: ", matchscores)
for i in range(nbr_images):
for j in range(i + 1, nbr_images): # no need to copy diagonal
matchscores[j, i] = matchscores[i, j]
threshold = 2 # min number of matches needed to create link
g = pydot.Dot(graph_type='graph') # don't want the default directed graph
for i in range(nbr_images):
for j in range(i + 1, nbr_images):
if matchscores[i, j] > threshold:
# first image in pair
im = Image.open(imlist[i])
im.thumbnail((100, 100))
filename = path + str(i) + '.png'
im.save(filename) # need temporary files of the right size
g.add_node(pydot.Node(str(i), fontcolor='transparent', shape='rectangle', image=filename))
# second image in pair
im = Image.open(imlist[j])
im.thumbnail((100, 100))
filename = path + str(j) + '.png'
im.save(filename) # need temporary files of the right size
g.add_node(pydot.Node(str(j), fontcolor='transparent', shape='rectangle', image=filename))
g.add_edge(pydot.Edge(str(i), str(j)))
g.write_png('untitled.png')
3.运行结果
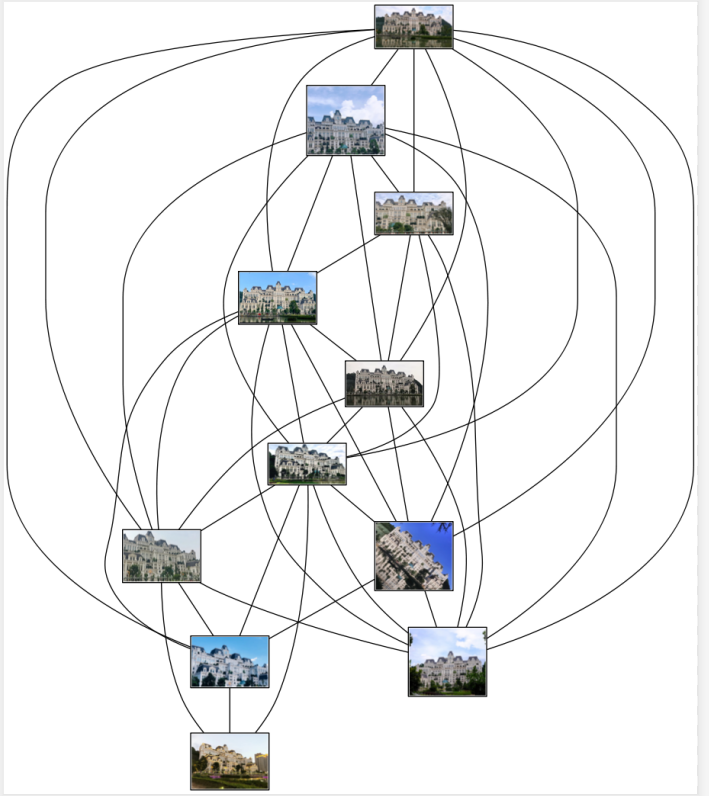
小结:我拍了同一场景不同角度的15张照片作为数据集,还拍了1张不同场景的图片做对比。由实验结果可以看出,图片的匹配度很高,尤其是正面图片和其他不同角度图片的匹配度最高,因为正面图包含特征点比较多,在计算匹配度时与其他图片特征点连接率最大。实验结果证明不同场景的图片无法匹配,但同时我发现有几张同一场景不同角度图片无法匹配,这应该是我拍摄的角度和光线明暗问题造成的,因为我拍的建筑物的正面图及侧面图没有很好的包含俯视图的特征点,而且俯视图有一张在晚上拍摄并且建筑物自带灯光这对于图片特征点的检索是有影响的,有一张是在白天拍摄并且只拍了局部,这对于正面的全景图来说匹配到这个局部太难了,即使不熟悉的人看了也不会觉得是同一个地方,因为为了加快代码运行速度,我降低了图片像素,这也降低算法对图片特征点的检索,对于局部图特征点的检索较好,也造成了无法匹配的结果。我还有一个问题就是拍摄的图片都过于相似,并且没有在同一时间拍摄,这其实并不能很好的说明匹配算法的准确性,下次会加以改正。
五、RANSAC算法应用
1.RANSAC算法
1.1算法简介:
RANSAC算法的基本假设是样本中包含正确数据(inliers,可以被模型描述的数据),也包含异常数据(outliers,偏离正常范围很远、无法适应数学模型的数据),即数据集中含有噪声。这些异常数据可能是由于错误的测量、错误的假设、错误的计算等产生的。同时RANSAC也假设,给定一组正确的数据,存在可以计算出符合这些数据的模型参数的方法。
1.2基本思想描述:
①考虑一个最小抽样集的势为n的模型(n为初始化模型参数所需的最小样本数)和一个样本集P,集合P的样本数#(P)>n,从P中随机抽取包含n个样本的P的子集S初始化模型M;
②余集SC=PS中与模型M的误差小于某一设定阈值t的样本集以及S构成S*。S*认为是内点集,它们构成S的一致集(Consensus Set);
③若#(S*)≥N,认为得到正确的模型参数,并利用集S*(内点inliers)采用最小二乘等方法重新计算新的模型M*;重新随机抽取新的S,重复以上过程。
④在完成一定的抽样次数后,若未找到一致集则算法失败,否则选取抽样后得到的最大一致集判断内外点,算法结束。
2.应用于图像拼接
使用RANSAC算法估计出图像间的单应性矩阵,将所有的图像扭曲到一个公共的图像平面上。通常,这里的公共平面为中心图像平面。一种方法是创建一个很大的图像,比如将图像中全部填充0,使其和中心图像平行,然后将所有的图像扭曲到上面。由于我们所有的图像是由照相机水平旋转拍摄的,因此我们可以使用一个较简单的步骤:将中心图像左边或者右边的区域填充为0,以便为扭曲的图像腾出空间。
3.代码实现
3.1源代码
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
# set paths to data folder
featname = ['C:/Users/LE/PycharmProjects/untitled/hh/' + str(i + 1) + '.sift' for i in range(4)]
imname = ['C:/Users/LE/PycharmProjects/untitled/hh/' + str(i + 1) + '.jpg' for i in range(4)]
# extract features and match
l = {}
d = {}
for i in range(4):
sift.process_image(imname[i], featname[i])
l[i], d[i] = sift.read_features_from_file(featname[i])
matches = {}
for i in range(3):#2
matches[i] = sift.match(d[i + 1], d[i])
# visualize the matches (Figure 3-11 in the book)
for i in range(3):#2
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i + 1]))
figure()
sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True)
# function to convert the matches to hom. points
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j + 1][ndx, :2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2, :2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1], fp[0], fp[2]])
tp = vstack([tp[1], tp[0], tp[2]])
return fp, tp
# estimate the homographies
model = homography.RansacModel()
fp, tp = convert_points(1)
H_12 = homography.H_from_ransac(fp, tp, model)[0] # im 1 to 2
fp, tp = convert_points(0)
H_01 = homography.H_from_ransac(fp, tp, model)[0] # im 0 to 1
# warp the images
delta = 1000 # for padding and translation
im1 = array(Image.open(imname[1]), "uint8")
im2 = array(Image.open(imname[2]), "uint8")
im_12 = warp.panorama(H_12, im1, im2, delta, delta)
im1 = array(Image.open(imname[0]), "f")
im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta)
figure()
imshow(array(im_02, "uint8"))
axis('off')
show()

sift匹配

图像拼接

小结:由实验结果可以看出,在景深丰富的条件下拼接效果不是很好,这与ransac算法提取图片特征点多少有关,还有即使图片角度不会太大影响算法提取特征点的效率,但会影响图片拼接结果
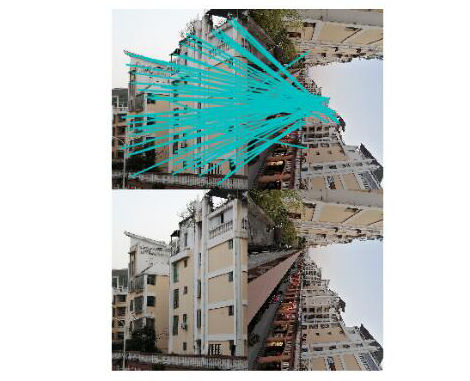
3.2.2景深单一
数据集
sift特征匹配
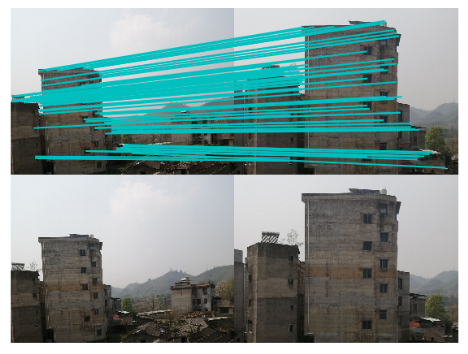

图片拼接

小结:由实验结果可以看出,景深单一的条件下图片的拼接明显比景深丰富拼接的效果好
六、总结
1.SIFT算法可以解决图片目标的旋转、缩放、平移 图像仿射/投影变换 、弱光照影响 、部分目标遮挡 、杂物场景 、 噪声等问题
2.SIFT算法的特征:
①独特性,特征点可分辨性高。
②多量性,物体可提供的特征多。
③高速性,速度快。
④可扩展,与其他形式的特征向量进行联合较为方便。
3.RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC则不能找到别的模型。
优点:很好的估计模型参数,能从包含大量局外点的数据集中估计出高精度的参数
缺点:它计算参数的迭代次数没有上限,如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果
七、实验过程遇到的问题
1.在配置vlfeat时,根据学姐给的配置步骤,下好vlfeat包解压后,应直接将sift.exe和vl.dll两个程序文件直接复制到自己运行的项目文件里,这里我画蛇添足又创建了一个文件夹存放,导致运行代码时报错找不到sift。
2.由于上次做harris实验得知图片像素过高造成代码无法运行,所以这次将图片像素降低太多,导致实验作对比时无法得出具有说服力的结论。
3.在配置环境时安装graphviz和pydot,确保安装顺序正确:graphviz->grapphviz软件本身->pydot,完成配置后运行代码出现这样的问题

这时需要打开 anacondaLibsite-packages 这个文件夹目录,找到pydot.py文件。在1712行(左Ctrl加F查找 self.prog)找到代码,原代码为self.prog = 'dot',将这行改为dot.exe所在位置:

记住要加r,保存后再运行程序得以解决。
4.运行ransac算法代码时遇到此问题

这是由于图片像素没有设置一致,将所有图片像素设置相同得以解决,同时像素不能太大会降低运行速度,也不能过小,这样提取的特征点不够准确。
5.还有两个未解决的问题


这可能与图片本身有关,在无法解决后,我换了新的数据集才能进行实验。
参考文章:https://blog.csdn.net/abcjennifer/article/details/7639681/