通过上一节编写ROS的第一个程序hello_world,我们对ROS的整个编程开发过程有了基本的了解,现在我们就来编写真正意义上的使用ROS进行节点间通信的程序。由于之前已经建好了catkin_ws这样一个工作空间,以后开发的功能包都将放在这里面,这里给新建的功能包取名为topic_example,在这个功能包中分别编写两个节点程序publish_node.cpp和subscribe_node.cpp,发布节点(publish_node)向话题(chatter)发布std_msgs::String类型的消息,订阅节点(subscribe_node)从话题(chatter)订阅std_msgs::String类型的消息,这里消息传递的具体内容是一句问候语“how are you ...”,通信网络结构如图16。

(图16)消息发布与订阅ROS通信网络结构图
##1.功能包的创建在catkin_ws/src/目录下新建功能包topic_example,并在创建时显式的指明依赖roscpp和std_msgs。打开命令行终端,输入命令:
cd ~/catkin_ws/src/
创建功能包topic_example时,显式的指明依赖roscpp和std_msgs,
依赖会被默认写到功能包的CMakeLists.txt和package.xml中
catkin_create_pkg topic_example roscpp std_msgs
功能包中需要编写两个独立可执行的节点,一个节点用来发布消息,另一个节点用来订阅消息,所以需要在新建的功能包topic_example/src/目录下新建两个文件publish_node.cpp和subscribe_node.cpp,并将下面的代码分别填入。
首先,介绍发布节点publish_node.cpp,代码内容如下:

1 #include "ros/ros.h" 2 #include "std_msgs/String.h" 3 4 #include <sstream> 5 6 int main(int argc, char **argv) 7 { 8 ros::init(argc, argv, "publish_node"); 9 ros::NodeHandle nh; 10 11 ros::Publisher chatter_pub = nh.advertise<std_msgs::String>("chatter", 1000); 12 ros::Rate loop_rate(10); 13 int count = 0; 14 15 while (ros::ok()) 16 { 17 std_msgs::String msg; 18 19 std::stringstream ss; 20 ss << "how are you " << count; 21 msg.data = ss.str(); 22 ROS_INFO("%s", msg.data.c_str()); 23 24 chatter_pub.publish(msg); 25 26 ros::spinOnce(); 27 loop_rate.sleep(); 28 ++count; 29 } 30 31 return 0; 32 }
对发布节点代码进行解析。
#include "ros/ros.h"
这一句是包含头文件ros/ros.h,这是ROS提供的C++客户端库,是必须包含的头文件。
#include "std_msgs/String.h"
由于代码中需要使用ROS提供的标准消息类型std_msgs::String,所以需要包含此头文件。
ros::init(argc, argv, "publish_node");
这一句是初始化ros节点并指明节点的名称,这里给节点取名为publish_node,一旦程序运行后就可以在ros的计算图中被注册为publish_node名称标识的节点。
ros::NodeHandle nh;
这一句是声明一个ros节点的句柄,初始化ros节点必须的。
ros::Publisher chatter_pub = nh.advertise<std_msgs::String>("chatter", 1000);
这句话告诉ros节点管理器我们将会在chatter这个话题上发布std_msgs::String类型的消息。这里的参数1000是表示发布序列的大小,如果消息发布的太快,缓冲区中的消息大于1000个的话就会开始丢弃先前发布的消息。
ros::Rate loop_rate(10);
这句话是用来指定自循环的频率,这里的参数10 表示10Hz频率,需要配合该对象的sleep()方法来使用。
while (ros::ok()) {...}
roscpp会默认安装以SIGINT句柄,这句话就是用来处理由ctrl+c键盘操作、该节点被另一同名节点踢出ROS网络、ros::shutdown()被程序在某个地方调用、所有ros::NodeHandle句柄都被销毁等触发而使ros::ok()返回false值的情况。
std_msgs::String msg;
定义了一个std_msgs::String消息类型的对象,该对象有一个数据成员data用于存放我们即将发布的数据。要发布出去的数据将被填充到这个对象的data成员中。
chatter_pub.publish(msg);
利用定义好的发布器对象将消息数据发布出去,这一句执行后,ROS网络中的其他节点便可以收到此消息中的数据。
ros::spinOnce();
这一句是让回调函数有机会被执行的声明,这个程序里面并没有回调函数,所以这一句可以不要,这里只是为了程序的完整规范性才放上来的。
loop_rate.sleep();
前面讲过,这一句是通过休眠来控制自循环的频率的。
接着,介绍订阅节点subscribe_node.cpp,代码内容如下:
1 #include "ros/ros.h" 2 #include "std_msgs/String.h" 3 4 void chatterCallback(const std_msgs::String::ConstPtr& msg) 5 { 6 ROS_INFO("I heard: [%s]",msg->data.c_str()); 7 } 8 9 int main(int argc, char **argv) 10 { 11 ros::init(argc, argv, "subscribe_node"); 12 ros::NodeHandle nh; 13 14 ros::Subscriber chatter_sub = nh.subscribe("chatter", 1000,chatterCallback); 15 16 ros::spin(); 17 18 return 0; 19 }
对订阅节点代码进行解析。
之前解释过的类似的代码就不做过多的解释了,这里重点解释一下前面没遇到过的代码。
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]",msg->data.c_str());
}
这是一个回调函数,当有消息到达chatter话题时会自动被调用一次,这个回调函数里面就是一句话,用来打印从话题中订阅的消息数据。
ros::Subscriber chatter_sub = nh.subscribe("chatter", 1000,chatterCallback);
这句话告诉ros节点管理器我们将会从chatter这个话题中订阅消息,当有消息到达时会自动调用这里指定的chatterCallback回调函数。这里的参数1000是表示订阅序列的大小,如果消息处理的速度不够快,缓冲区中的消息大于1000个的话就会开始丢弃先前接收的消息。
ros::spin();
这一句话让程序进入自循环的挂起状态,从而让程序以最好的效率接收消息并调用回调函数。如果没有消息到达,这句话不会占用很多CPU资源,所以这句话可以放心使用。一旦ros::ok()被触发而返回false,ros::spin()的挂起状态将停止并自动跳出。简单点说,程序执行到这一句,就在这里不断自循环,与此同时检查是否有消息到达并决定是否调用回调函数。
##3.功能包的编译配置及编译创建功能包topic_example时,显式的指明依赖roscpp和std_msgs,依赖会被默认写到功能包的CMakeLists.txt和package.xml中,所以只需要在CMakeLists.txt文件的末尾行加入以下几句用于声明可执行文件就可以了:
add_executable(publish_node src/publish_node.cpp) target_link_libraries(publish_node ${catkin_LIBRARIES})add_executable(subscribe_node src/subscribe_node.cpp)
target_link_libraries(subscribe_node ${catkin_LIBRARIES})
接下来,就可以用下面的命令对功能包进行编译了:
cd ~/catkin_ws/ catkin_make -DCATKIN_WHITELIST_PACKAGES="topic_example"
首先,需要用roscore命令来启动ROS节点管理器,ROS节点管理器是所有节点运行的基础。
打开命令行终端,输入命令:
roscore
然后,用source devel/setup.bash激活catkin_ws工作空间,用rosrun <package_name> <node_name>启动功能包中的发布节点。
再打开一个命令行终端,分别输入命令:
cd ~/catkin_ws/ source devel/setup.bash rosrun topic_example publish_node
看到有输出“how are you ...”,就说明发布节点已经正常启动并开始不断向chatter话题发布消息数据,如图17。
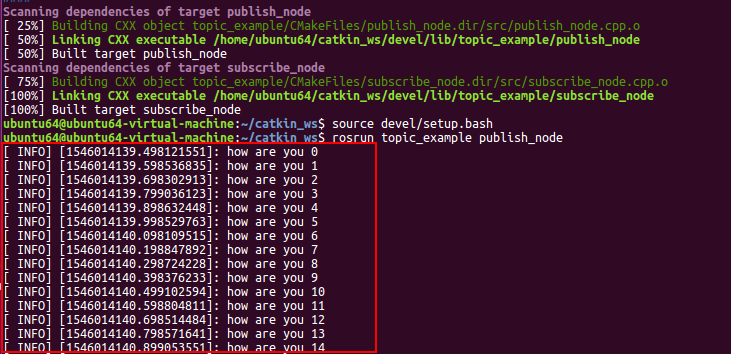
(图17)发布节点已经正常启动
最后,用source devel/setup.bash激活catkin_ws工作空间,用rosrun <package_name> <node_name>启动功能包中的订阅节点。
再打开一个命令行终端,分别输入命令:
cd ~/catkin_ws/ source devel/setup.bash rosrun topic_example subscribe_node
看到有输出“I heard:[how are you ...]”,就说明订阅节点已经正常启动并开始不断从chatter话题接收消息数据,如图18。

(图18)订阅节点已经正常启动
到这里,我们编写的消息发布器和订阅器就大功告成了,为了加深对整个程序工作流程的理解,我再把消息发布与订阅的ROS通信网络结构图拿出来,加深一下理解。

(图19)消息发布与订阅ROS通信网络结构图