没下载下来。。。
http://download.csdn.net/detail/shwaicy1314/7320695
原文翻译。应该是 2004年lowe写的吧
第八页
图C展示的 是小于0.03 的剩下的729个关键点。为什么是 小于 0.03呢?
图D附加一个 主曲率极限,剩下了 536个关键点。
所以 理论上读完20篇文献是够的!!!唉!!!之前的我 都在干什么啊!!!
第10页
4.1排除角反射
首先为了找到 sift点,一些 低对比度的点是要排除的。
其次应该就是 角反射点了。
H的特征值 与D(D应该是 第八页的尺度空间方程)的主曲率,对吧函数才有主曲率。
H是多元函数二阶偏导数构成的矩阵。
D的主曲率也来自相同的函数。
在1988年Harris和 Stephens开创了一种方法,可以避免计算特征的,只关心他们的比值:
H的特征值与D的主曲率成正比。
http://blog.csdn.net/sunny_happy/article/details/7826120
所以 在 这里到时候 一笔带过吧,反正 lowe认证过了,这样做是可以的。

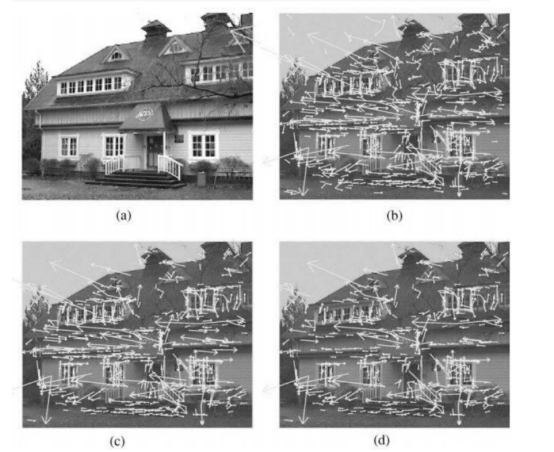
a原图
降低对比度。
b 高斯差分探测到的 特征点
c 出去低对比度的点 通过
d 巴拉巴拉一堆,就是说比值很重要,这个 比值来自于多元函数的偏导数构成的矩阵以及Dx的主曲率,小于10的比值
啊~~~看图
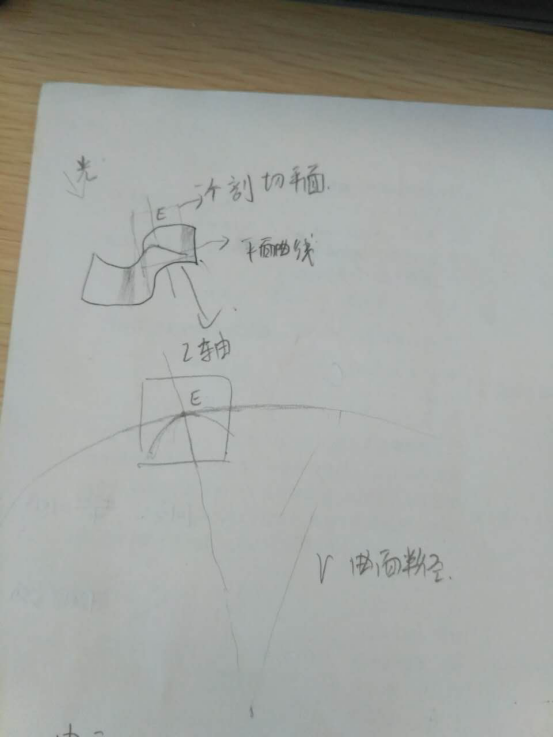
最大最小曲率顺边儿拐,是不是说明这是一个 凹点或者凸点,如果乘积为负是不是就说明这个点不是极值点。所以有原文:

所以有这样一个化简。
得到了:

之后,由于:为了更加明显的特征点,我们取10,当然你说 想取个11 12的,那当然也行,不过原文取得是10.这样我们就从原来的多少多少个点里面弄了五百多个。