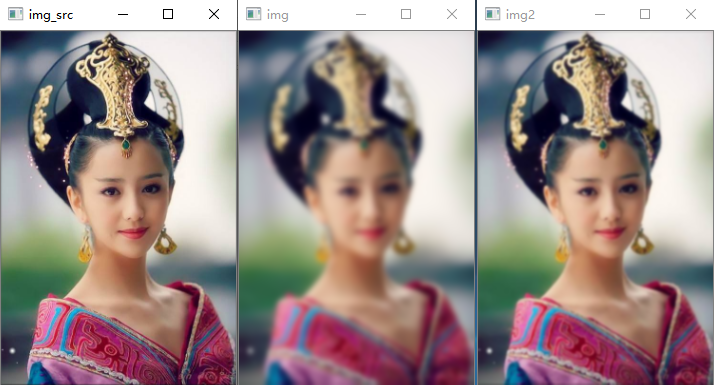
一、高斯平滑(模糊)
def gaussian_blur(image): # 设置ksize来确定模糊效果 img = cv.GaussianBlur(image, (5, 5), 0) cv.imshow('img', img) # 不通过ksize来设置高斯核大小,通过设置高斯分布公式中的sigma img2 = cv.GaussianBlur(image, (0, 0), 1) cv.imshow('img2', img2)
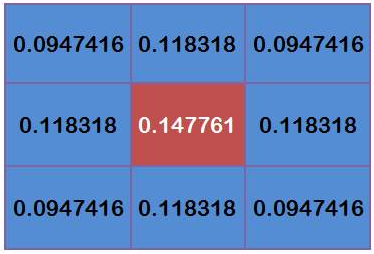
在高斯平滑中,高斯核中所有数字加起来应该为1,这样才能保证图片只发生平滑效果,而不影响亮度等其他效果。
例如3x3的高斯核如下所示:
二、边缘保留滤波(EPF)
高斯双边模糊(美颜):
def bi_blur(image): img = cv.bilateralFilter(image, 0, 100, 5) cv.imshow('img', img)
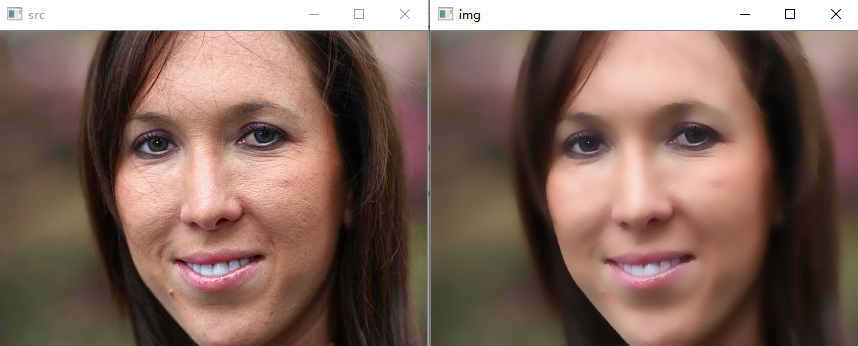
从效果可以看出,边缘保留的还不错,而非边缘进行了模糊。双边模糊的效率比较低,特别是sigmaSpace比较大的时候。
cv.bilateralFilter()函数的参数:
src:原图像
d:过滤过程中每个像素领域的直径范围,若非正数,则从sigmaSpace计算
sigmaColor:值越大,表示像素领域内有多宽的颜色(颜色范围)会被混在一起
sigmaSpace:如果值较大,表示颜色相近的较远像素(空间范围)将互相影响,从而使更大区域足够相似的颜色获取相同的颜色。
三、腐蚀和膨胀
腐蚀操作:
# 腐蚀操作,用于去除一些细小的白色颗粒或线条 def erode_img(image): kernel = np.ones((5,5),np.uint8) # 当核尺寸越大时,每次腐蚀的程度越大,iter是操作中叠加几次腐蚀 img = cv.erode(image,kernel,iterations = 1) cv.imshow('img',img)
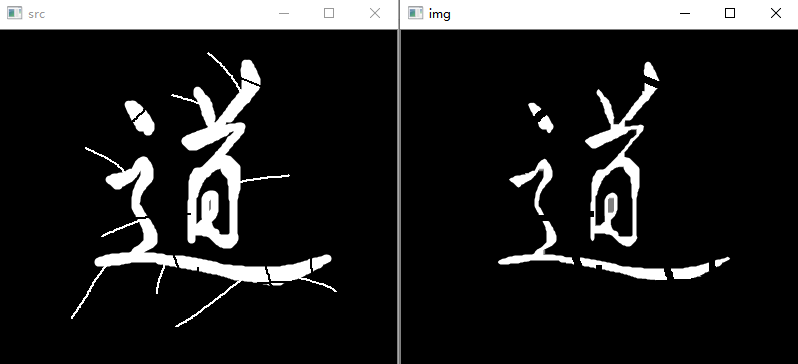
膨胀操作:
膨胀可以说是腐蚀的反操作:
# 膨胀操作,用于去除一些细小的黑色漏洞 def dilate_img(image): kernel = np.ones((5, 5), np.uint8) img = cv.dilate(image, kernel, iterations=1) cv.imshow('img', img)

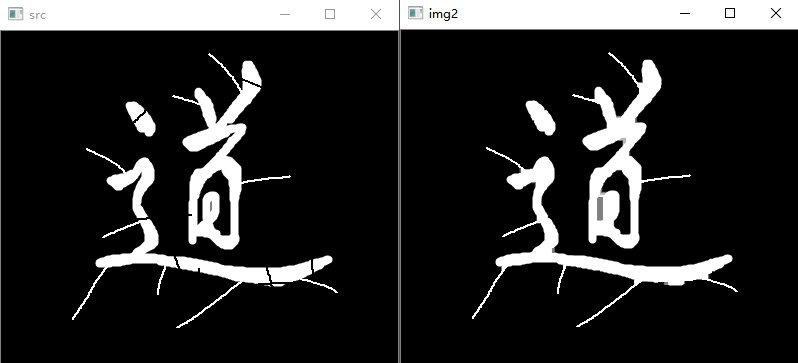
结合腐蚀和膨胀:
结合腐蚀和膨胀,可以消除一些细小的不需要的部分,然后再复原。
def combo_proc(image): kernel = np.ones((5, 5), np.uint8) img = cv.dilate(image, kernel, iterations=1) img2 = cv.erode(img, kernel, iterations=1) cv.imshow('img2', img2)
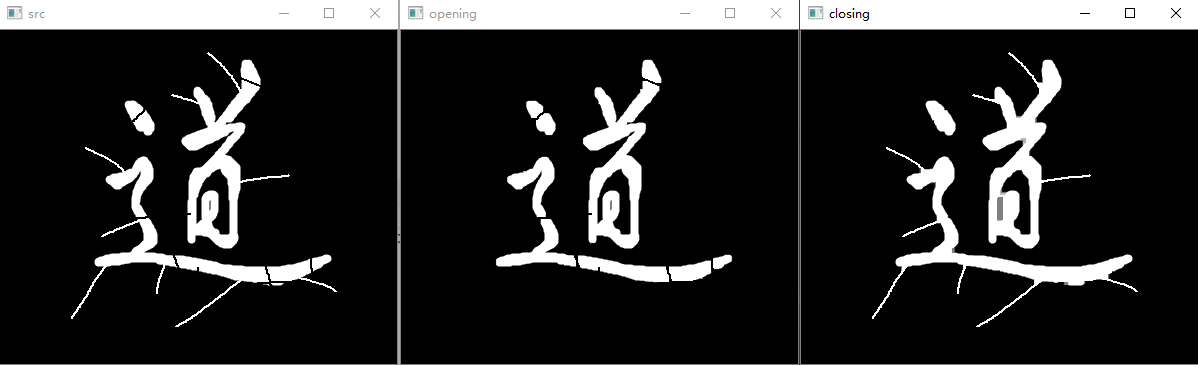
四、开运算和闭运算
# 开操作:先腐蚀再膨胀 def open_proc(image): kernel = np.ones((5, 5), np.uint8) opening = cv.morphologyEx(image, cv.MORPH_OPEN, kernel) cv.imshow('opening', opening) # 闭操作:先膨胀再腐蚀 def close_proc(image): kernel = np.ones((5, 5), np.uint8) closing = cv.morphologyEx(image, cv.MORPH_CLOSE, kernel) cv.imshow('closing', closing)
结合开闭运算:
# 先做开操作,再做闭操作 def open_close_proc(image): kernel = np.ones((5, 5), np.uint8) opening = cv.morphologyEx(image, cv.MORPH_OPEN, kernel) closing = cv.morphologyEx(opening, cv.MORPH_CLOSE, kernel) cv.imshow('closing', closing)

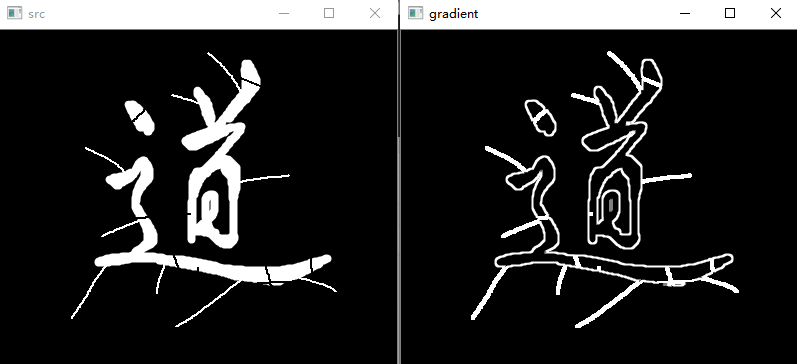
梯度运算:
# 梯度操作:膨胀 - 腐蚀 def gradient_proc(image): kernel = np.ones((3, 3), np.uint8) gradient = cv.morphologyEx(image, cv.MORPH_GRADIENT, kernel) cv.imshow('gradient', gradient)
五、礼帽和黑帽
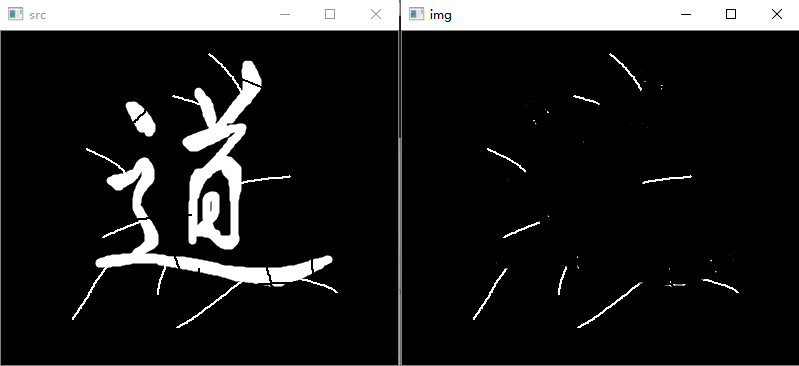
礼帽是通过原图片减去开操作后的图像,得到其中的多于细小部分(字边上的白色细线)。
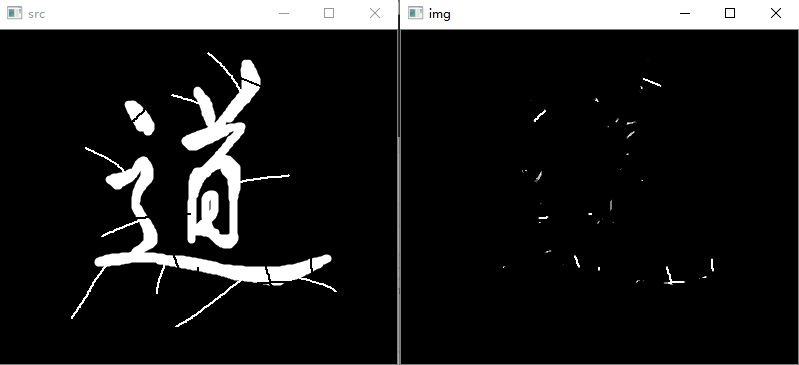
黑帽是通过闭操作后的图像减去原图像,得到其中的细小泄漏部分(字中间的黑色细线)。
礼帽:tophat
# tophat 礼帽 def tophat_img(image): kernel = np.ones((3, 3), np.uint8) img = cv.morphologyEx(image, cv.MORPH_TOPHAT, kernel) cv.imshow('img', img)
黑帽:blackhat
# blackhat 黑帽 def blackhat_img(image): kernel = np.ones((3, 3), np.uint8) img = cv.morphologyEx(image, cv.MORPH_BLACKHAT, kernel) cv.imshow('img', img)
六、Sobel算子
def sobel_proc(image): # 这里的cv.CV_64F用来保存所有的梯度(不管正负),1,0是dx,dy表示计算横向梯度 sobelx = cv.Sobel(image, cv.CV_64F, 1, 0, ksize=3) # 将所有梯度取绝对值 sobelx = cv.convertScaleAbs(sobelx) cv.imshow('sobelx', sobelx) # 计算y方向的梯度 sobely = cv.Sobel(image, cv.CV_64F, 0, 1, ksize=3) # 将所有梯度取绝对值 sobely = cv.convertScaleAbs(sobely) cv.imshow('sobely', sobely)
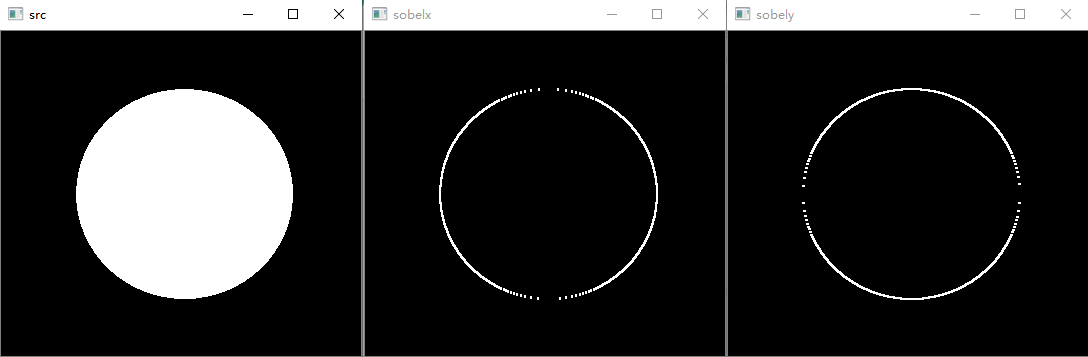
当计算X,Y方向的梯度时,Sobel算子分别为:
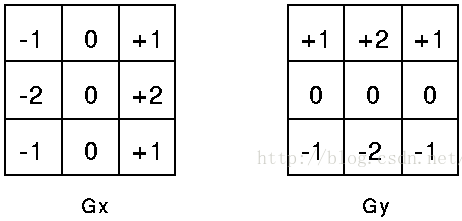
X方向是右边像素减去左边像素,Y方向是上面像素减去下面的像素。
将XY方向的梯度合并起来:
def sobel_proc(image): # 这里的cv.CV_64F用来保存所有的梯度(不管正负),1,0是dx,dy表示计算横向梯度 sobelx = cv.Sobel(image, cv.CV_64F, 1, 0, ksize=3) # 将所有梯度取绝对值 sobelx = cv.convertScaleAbs(sobelx) # cv.imshow('sobelx', sobelx) # 计算y方向的梯度 sobely = cv.Sobel(image, cv.CV_64F, 0, 1, ksize=3) # 将所有梯度取绝对值 sobely = cv.convertScaleAbs(sobely) # cv.imshow('sobely', sobely) # 将x和y方向的梯度合并起来,类似于sobelx+sobely sobelxy = cv.addWeighted(sobelx, 1, sobely, 1, 0) cv.imshow('sobelxy', sobelxy) # 不建议使用这种方式,有问题 sobelxy2 = cv.Sobel(image, -1, 1, 1, ksize=3) cv.imshow('sobelxy2', sobelxy2)
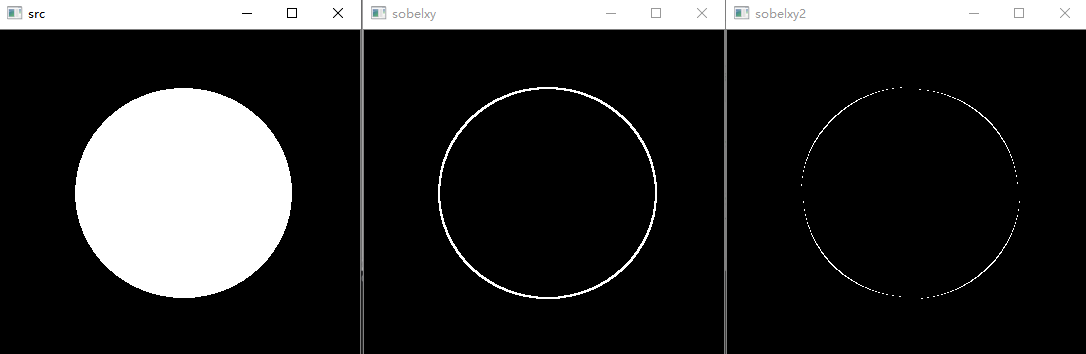
建议使用addWeight()的方式进行合并,而不建议在一个Sobel计算中同时计算xy方向的梯度。
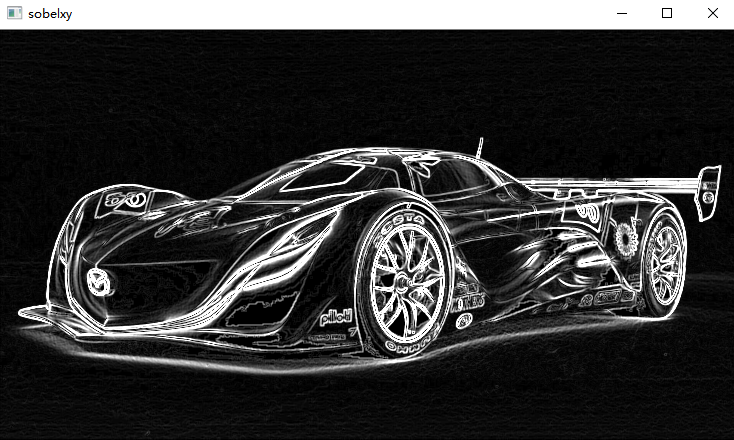
应用到图片上:
彩色图:

灰度图:
七、其他算子介绍
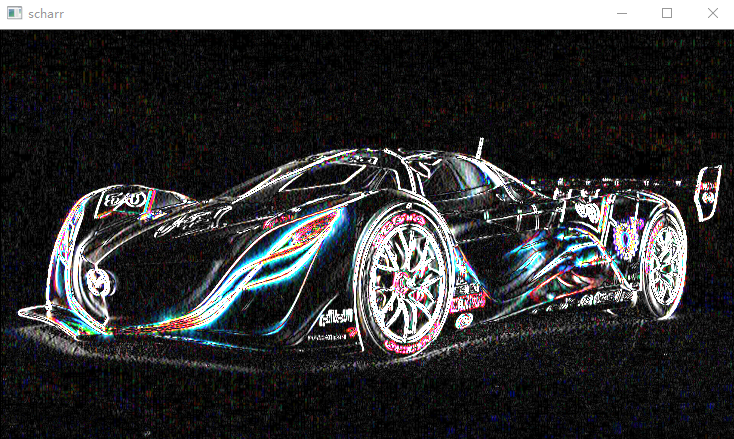
Scharr算子:(读/ʃɑr/)

scharr = cv.Scharr(image,cv.CV_64F, 1, 0)
scharr = cv.convertScaleAbs(scharr)
Scharr算子和Sobel算子类似,只是数值比Sobel大很多,这就导致Scharr算子灵敏度更高,噪声影响较大。如下图:
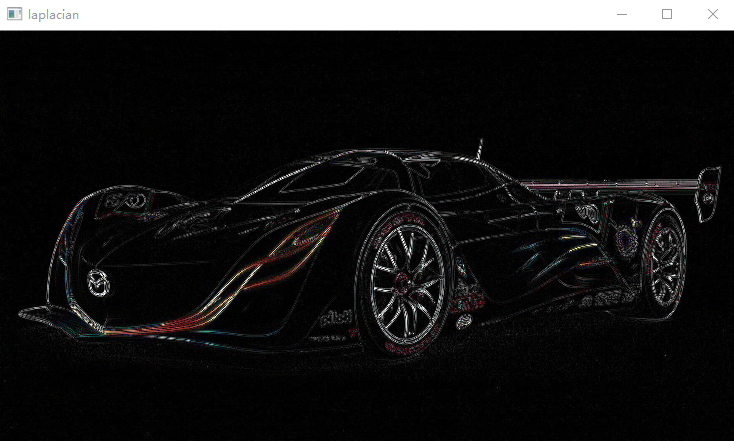
Laplacian算子:
拉普拉斯算子是图像的离散二阶导数,用于发现边缘突变,但对于噪声来说比较灵敏,一般配合其他技术一起使用。
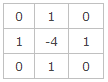
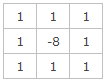
laplacian = cv.Laplacian(image,cv.CV_64F)
laplacian = cv.convertScaleAbs(laplacian)
Laplacian算是和前面的两种算子不同,前面的两种算子都属于一阶导数,而Laplacian算子是用于计算二阶导数的。体现的是边缘的突变度,即梯度的变化度。效果如图: