博客部分公式有格式问题,请前往语雀: https://www.yuque.com/leesamoyed/bvsayi/hrobcr
一、最小二乘法(矩阵表达;几何意义):
1.线性拟合是用线去拟合样本点:

假设:
其中: ,
 ,
,
有:
事实上要拟合的曲线:
其中: (在这里
(在这里 所以我们更倾向于把它写入
所以我们更倾向于把它写入 )
)
2.最小二乘估计:
最小二乘法定义:
其中:

得到:

得到:

得到:

所以:

注意: 称为伪逆记为
称为伪逆记为
第一个几何解释:距离和。
另一个几何解释:对于要拟合的直线我们从另一个角度看: ,把
,把 想象为
想象为 维度的一个系数:
维度的一个系数: ,横着看就是
,横着看就是 样本点,竖着看就是一个维,由可以形成一个维空间(一般
样本点,竖着看就是一个维,由可以形成一个维空间(一般 ),
), 形成的向量一般不在维空间(存在噪声之类的),最小二乘法就是在维空间中找到一条线,让距离线(平面最近),那么很显然就是投影。
形成的向量一般不在维空间(存在噪声之类的),最小二乘法就是在维空间中找到一条线,让距离线(平面最近),那么很显然就是投影。
既然是投影就会垂直于维空间,就会垂直于每一个向量,就有
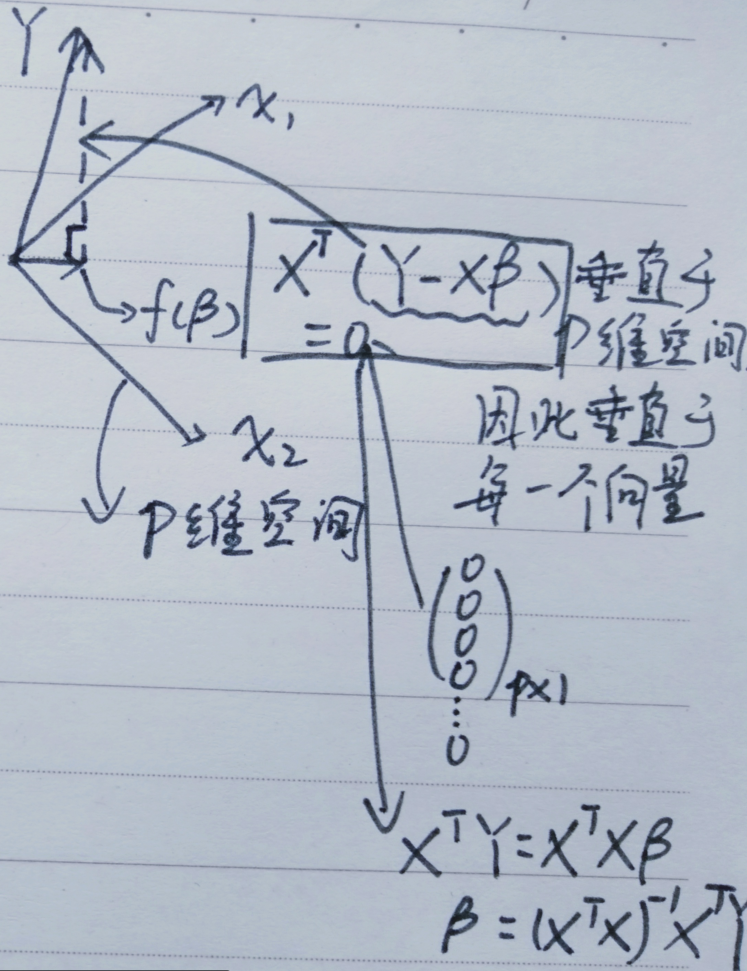
显而易见的是,结果和我们之前推导的结果是一样的,所以从这个角度就很好推证。
这个就是把误差看成每个维度。
二、最小二乘法-概率角度:
概率视角:
假设:
其中: , ,
, ,
有:
 :样本
:样本  :值
:值
最小二乘估计:



假设存在噪声:







和最小二乘估计的 一样
一样
 (noise is Gaussian Dist)
(noise is Gaussian Dist)
三、正则化-岭回归-频率角度:
Loss Function:
 ,个样本,(一般
,个样本,(一般 ),如果样本纬度高,样本量少容易造成过拟合
),如果样本纬度高,样本量少容易造成过拟合
过拟合 ①加数据;②特征选择/特征提取;③正则化;
①加数据;②特征选择/特征提取;③正则化;
正则化是对对目标函数的约束
正则化框架: (loss+惩罚)
(loss+惩罚)
L1(一范式)Lasso,
L2(二范式):Ridge(岭回归), (岭回归全称:权值衰减)
(岭回归全称:权值衰减)
L2对应的函数:




四、正则化-岭回归-贝叶斯角度:
频率角度:

贝叶斯角度:
先验: (此时
(此时 不再是常数)
不再是常数)
后验:




这里 和
和 是我设置的,本质上是超参数,但是这里可以看做常数
是我设置的,本质上是超参数,但是这里可以看做常数

这里省略了 完全写出来如下:
完全写出来如下:

和 一样
一样

Regularized (noise为Gaussian Dist)(prior也是GD)
(noise为Gaussian Dist)(prior也是GD)
线性回归:
①线性 ②全局性 ③数据未加工