本文是用于记录在了解和学习CORDIC算法期间的收获,以供日后自己及他人参考;并且附上了使用Verilog实现CORDIC算法求解角度的正弦和余弦的代码、简单的testbench测试代码、以及在Modelsim下的仿真结果。
本文主要参考了:
【1】https://www.cnblogs.com/aikimi7/p/3929592.html (cordic算法的verilog实现及modelsim仿真)
【2】https://www.cnblogs.com/qiweiwang/archive/2010/07/28/1787021.html(CORDIC算法--流水线结构)
【3】https://www.cnblogs.com/yuphone/archive/2010/09/21/1832217.html([文档].艾米电子 - 算术运算电路,Verilog)
【4】https://wenku.baidu.com/view/54b251aaa98271fe900ef97e(如何理解CORDIC算法)
【5】https://wenku.baidu.com/view/60a0a07831b765ce050814b7(针对正弦余弦计算的CORDIC算法优化及其FPGA实现)
感谢!
-------------------------------------------------------------------------------------------------------------
1、算法简介
CORDIC(Coordinate Rotation Digital Computer)算法即坐标旋转数字计算方法,是J.D.Volder1于1959年首次提出,主要用于三角函数、双曲线、指数、对数的计算。该算法通过基本的加和移位运算代替乘法运算,使得矢量的旋转和定向的计算不再需要三角函数、乘法、开方、反三角、指数等函数,计算向量长度并能把直角坐标系转换为极坐标系。因为Cordic 算法只用了移位和加法,很容易用纯硬件来实现,非常适合FPGA实现。
CORDIC算法是天平称重思想在数值运算领域的杰出范例。核心的思想是把非线性的问题变成了线性的迭代问题【4】。
CORDIC算法完成坐标或向量的平面旋转(下图以逆时针旋转为例)。

旋转后,可得如下向量:

旋转的角度θ经过多次旋转得到的(步步逼近,接近二分查找法),每次旋转一小角度。单步旋转定义如下公式:

公式(2)提取cosθ,可修改为:

修改后的公式把乘法次数从4次改为3次,剩下的乘法运算可以通过选择每次旋转的角度去除,将每一步的正切值选为2的指数(二分查找法),除以2的指数可以通过右移操作完成(verilog)。
每次旋转的角度可以表示为:

所有迭代角度累加值等于最终需要的旋转角度θ:

这里Sn为1或者-1,根据旋转方向确定(后面有确定方法,公式(15)),顺时针为-1,逆时针为1。
![]()
可以得到如下公式:

结合公式(3)和(7),得到公式(8):

到这里,除了余弦值这个系数,算法只要通过简单的移位和加法操作完成。而这个系数可以通过预先计算最终值消掉。首先重新重写这个系数如下:

第二步计算所有的余弦值并相乘,这个值K称为增益系数。

由于K值是常量,我们可以先忽略它。


到这里我们发现,算法只剩下移位和加减法,这就非常适合硬件实现了,为硬件快速计算三角函数提供了一种新的算法。在进行迭代运算时,需要引入一个新的变量Z,表示需要旋转的角度θ中还没有旋转的角度。

这里,我们可以把前面提到确定旋转方向的方法介绍了,就是通过这个变量Z的符号确定。

![]()
通过公式(5)和(15),将未旋转的角度变为0。
一个类编程风格的结构如下,反正切值是预先计算好的。

1.1 旋转模式
旋转模式下,CORDIC算法驱动Z变为0,结合公式(13)和(16),算法的核心计算如下:
![]()
一种特殊情况是,另初始值如下:

因此,旋转模式下CORDIC算法可以计算一个输入角度的正弦值和余弦值。
1.2 向量模式
向量模式下,有两种特例:

因此,向量模式下CORDIC算法可以用来计算输入向量的模和反正切,也能开方计算,并可以将直角坐标转换为极坐标。
算法介绍:http://en.wikipedia.org/wiki/Cordic,http://blog.csdn.net/liyuanbhu/article/details/8458769
2、硬件算法实现
根据【5】,可以看到CORDIC迭代算法的一种直接实现方式是反馈结构,此结构只设计一级CORDIC运算迭代单元、然后在系统时钟的驱动下,将本级的输出作为本级的输入,通过同一级迭代完成运算。这种方法硬件开销小、但控制相对复杂。
所以根据【1】、【2】,使用流水线结构实现了CORDIC迭代算法、求取了角度的正弦和余弦值。
下面分段介绍下各部分代码:
首先是角度的表示,进行了宏定义,360读用16位二进制表示2^16,每一度为2^16/360。
//360°--2^16,phase_in = 16bits (input [15:0] phase_in) //1°--2^16/360 `define rot0 16'h2000 //45 `define rot1 16'h12e4 //26.5651 `define rot2 16'h09fb //14.0362 `define rot3 16'h0511 //7.1250 `define rot4 16'h028b //3.5763 `define rot5 16'h0145 //1.7899 `define rot6 16'h00a3 //0.8952 `define rot7 16'h0051 //0.4476 `define rot8 16'h0028 //0.2238 `define rot9 16'h0014 //0.1119 `define rot10 16'h000a //0.0560 `define rot11 16'h0005 //0.0280 `define rot12 16'h0003 //0.0140 `define rot13 16'h0002 //0.0070 `define rot14 16'h0001 //0.0035 `define rot15 16'h0000 //0.0018
然后是流水线级数定义、增益放大倍数以及中间结果位宽定义。流水线级数16,为了满足精度要求,有文献指出流水线级数必须大于等于角度位宽16(针对正弦余弦计算的CORDIC算法优化及其FPGA实现)。增益放大2^16,为了避免溢出状况中间结果(x,y,z)定义为17为,最高位作为符号位判断,1为负数,0为正数。
module cordic ( input clk, input [15:0] phase_in, output reg signed [16:0] eps, output reg signed [16:0] sin, output reg signed [16:0] cos ); parameter PIPELINE = 16; parameter K = 16'h9b74; //gian k=0.607253*2^16,9b74,n means the number pipeline //pipeline 16-level //maybe overflow,matlab result not overflow //MSB is signed bit,transform the sin and cos according to phase_in[15:14] reg signed [16:0] x0=0,y0=0,z0=0; reg signed [16:0] x1=0,y1=0,z1=0; reg signed [16:0] x2=0,y2=0,z2=0; reg signed [16:0] x3=0,y3=0,z3=0; reg signed [16:0] x4=0,y4=0,z4=0; reg signed [16:0] x5=0,y5=0,z5=0; reg signed [16:0] x6=0,y6=0,z6=0; reg signed [16:0] x7=0,y7=0,z7=0; reg signed [16:0] x8=0,y8=0,z8=0; reg signed [16:0] x9=0,y9=0,z9=0; reg signed [16:0] x10=0,y10=0,z10=0; reg signed [16:0] x11=0,y11=0,z11=0; reg signed [16:0] x12=0,y12=0,z12=0; reg signed [16:0] x13=0,y13=0,z13=0; reg signed [16:0] x14=0,y14=0,z14=0; reg signed [16:0] x15=0,y15=0,z15=0; reg signed [16:0] x16=0,y16=0,z16=0;
还需要定义memory型寄存器数组并初始化为0,用于寄存输入角度高2位的值。
reg [1:0] quadrant [PIPELINE:0]; integer i; initial begin for(i=0;i<=PIPELINE;i=i+1) quadrant[i] = 2'b0; end
接着,是对输入角度象限处理,将角度都转换到第一象限,方便处理。输入角度值最高两位赋值0,即转移到第一象限[0°,90°]。此外,完成x0,y0和z0的初始化,并增加一位符号位。
always @ (posedge clk)//stage 0,not pipeline begin x0 <= {1'b0,K}; //add one signed bit,0 means positive y0 <= 17'b0; z0 <= {3'b0,phase_in[13:0]};//control the phase_in to the range[0-Pi/2] end
接下来根据剩余待旋转角度z的符号位进行16次迭代处理,即完成16级流水线处理。


always @ (posedge clk)//stage 1 begin if(z0[16])//the diff is negative so clockwise begin x1 <= x0 + y0; y1 <= x0 - y0; z1 <= z0 + `rot0; end else begin x1 <= x0 - y0;//x1 <= x0; y1 <= x0 + y0;//y1 <= x0; z1 <= z0 - `rot0;//reversal 45 end end always @ (posedge clk)//stage 2 begin if(z1[16])//the diff is negative so clockwise begin x2 <= x1 + (y1>>>4'd1); y2 <= y1 - (x1>>>4'd1); z2 <= z1 + `rot1;//clockwise 26 end else begin x2 <= x1 - (y1>>>4'd1); y2 <= y1 + (x1>>>4'd1); z2 <= z1 - `rot1;//anti-clockwise 26 end end always @ (posedge clk)//stage 3 begin if(z2[16])//the diff is negative so clockwise begin x3 <= x2 + (y2>>>4'd2); //right shift n bits,divide 2^n y3 <= y2 - (x2>>>4'd2); //left adds n bits of MSB,in first quadrant x or y are positive,MSB =0 ?? z3 <= z2 + `rot2;//clockwise 14 //difference of positive and negtive number and no round(4,5) end else begin x3 <= x2 - (y2>>>4'd2); y3 <= y2 + (x2>>>4'd2); z3 <= z2 - `rot2;//anti-clockwise 14 end end always @ (posedge clk)//stage 4 begin if(z3[16]) begin x4 <= x3 + (y3>>>4'd3); y4 <= y3 - (x3>>>4'd3); z4 <= z3 + `rot3;//clockwise 7 end else begin x4 <= x3 - (y3>>>4'd3); y4 <= y3 + (x3>>>4'd3); z4 <= z3 - `rot3;//anti-clockwise 7 end end always @ (posedge clk)//stage 5 begin if(z4[16]) begin x5 <= x4 + (y4>>>4'd4); y5 <= y4 - (x4>>>4'd4); z5 <= z4 + `rot4;//clockwise 3 end else begin x5 <= x4 - (y4>>>4'd4); y5 <= y4 + (x4>>>4'd4); z5 <= z4 - `rot4;//anti-clockwise 3 end end always @ (posedge clk)//STAGE 6 begin if(z5[16]) begin x6 <= x5 + (y5>>>4'd5); y6 <= y5 - (x5>>>4'd5); z6 <= z5 + `rot5;//clockwise 1 end else begin x6 <= x5 - (y5>>>4'd5); y6 <= y5 + (x5>>>4'd5); z6 <= z5 - `rot5;//anti-clockwise 1 end end always @ (posedge clk)//stage 7 begin if(z6[16]) begin x7 <= x6 + (y6>>>4'd6); y7 <= y6 - (x6>>>4'd6); z7 <= z6 + `rot6; end else begin x7 <= x6 - (y6>>>4'd6); y7 <= y6 + (x6>>>4'd6); z7 <= z6 - `rot6; end end always @ (posedge clk)//stage 8 begin if(z7[16]) begin x8 <= x7 + (y7>>>4'd7); y8 <= y7 - (x7>>>4'd7); z8 <= z7 + `rot7; end else begin x8 <= x7 - (y7>>>4'd7); y8 <= y7 + (x7>>>4'd7); z8 <= z7 - `rot7; end end always @ (posedge clk)//stage 9 begin if(z8[16]) begin x9 <= x8 + (y8>>>4'd8); y9 <= y8 - (x8>>>4'd8); z9 <= z8 + `rot8; end else begin x9 <= x8 - (y8>>>4'd8); y9 <= y8 + (x8>>>4'd8); z9 <= z8 - `rot8; end end always @ (posedge clk)//stage 10 begin if(z9[16]) begin x10 <= x9 + (y9>>>4'd9); y10 <= y9 - (x9>>>4'd9); z10 <= z9 + `rot9; end else begin x10 <= x9 - (y9>>>4'd9); y10 <= y9 + (x9>>>4'd9); z10 <= z9 - `rot9; end end always @ (posedge clk)//stage 11 begin if(z10[16]) begin x11 <= x10 + (y10>>>4'd10); y11 <= y10 - (x10>>>4'd10); z11 <= z10 + `rot10; end else begin x11 <= x10 - (y10>>>4'd10); y11 <= y10 + (x10>>>4'd10); z11 <= z10 - `rot10; end end always @ (posedge clk)//stage 12 begin if(z11[16]) begin x12 <= x11 + (y11>>>4'd11); y12 <= y11 - (x11>>>4'd11); z12 <= z11 + `rot11; end else begin x12 <= x11 - (y11>>>4'd11); y12 <= y11 + (x11>>>4'd11); z12 <= z11 - `rot11; end end always @ (posedge clk)//stage 13 begin if(z12[16]) begin x13 <= x12 + (y12>>>4'd12); y13 <= y12 - (x12>>>4'd12); z13 <= z12 + `rot12; end else begin x13 <= x12 - (y12>>>4'd12); y13 <= y12 + (x12>>>4'd12); z13 <= z12 - `rot12; end end always @ (posedge clk)//stage 14 begin if(z13[16]) begin x14 <= x13 + (y13>>>4'd13); y14 <= y13 - (x13>>>4'd13); z14 <= z13 + `rot13; end else begin x14 <= x13 - (y13>>>4'd13); y14 <= y13 + (x13>>>4'd13); z14 <= z13 - `rot13; end end always @ (posedge clk)//stage 15 begin if(z14[16]) begin x15 <= x14 + (y14>>>4'd14); y15 <= y14 - (x14>>>4'd14); z15 <= z14 + `rot14; end else begin x15 <= x14 - (y14>>>4'd14); y15 <= y14 + (x14>>>4'd14); z15 <= z14 - `rot14; end end always @ (posedge clk)//stage 16 begin if(z15[16]) begin x16 <= x15 + (y15>>>4'd15); y16 <= y15 - (x15>>>4'd15); z16 <= z15 + `rot15; end else begin x16 <= x15 - (y15>>>4'd15); y16 <= y15 + (x15>>>4'd15); z16 <= z15 - `rot15; end end
其中使用到了算数右移(>>>)运算、所以在之前声明时将相应的reg/wire均声明为signed类型。这一点在【1】的最后也有说明。
需要注意的是这里的算数移位运算(这一运算的详细过程在【3】中进行了说明),与之区分的是逻辑移位运算。
二者规则为:
逻辑左移和右移,空出的位均补零。
算数左移与逻辑左移相同,都在低位补零;算数右移、移出的高位比特使用符号位填充(0正1负)
举例说明,对8'b_1011_0111进行逻辑、算数移位的结果如下图所示:

比如这里的原数值是8'b10110111、为负数(补码形式)、换算成十进制为-73.
算数右移一位之后的结果是8'b11011011、由补码换算成原码再换算为十进制为-37.
由于进行了象限的转换,最终流水结果需要根据象限进行转换为正确的值。这里寄存17次高2位角度输入值,配合流水线结果用于象限判断,并完成转换。
//according to the pipeline,register phase_in[15:14] always @ (posedge clk) begin quadrant[0] <= phase_in[15:14]; quadrant[1] <= quadrant[0]; quadrant[2] <= quadrant[1]; quadrant[3] <= quadrant[2]; quadrant[4] <= quadrant[3]; quadrant[5] <= quadrant[4]; quadrant[6] <= quadrant[5]; quadrant[7] <= quadrant[6]; quadrant[8] <= quadrant[7]; quadrant[9] <= quadrant[8]; quadrant[10] <= quadrant[9]; quadrant[11] <= quadrant[10]; quadrant[12] <= quadrant[11]; quadrant[13] <= quadrant[12]; quadrant[14] <= quadrant[13]; quadrant[15] <= quadrant[14]; quadrant[16] <= quadrant[15]; end
最后,根据寄存的高2位角度输入值,利用三角函数关系,得出最后的结果,其中负数进行了补码操作。
//alter register, according to quadrant[16] to transform the result to the right result always @ (posedge clk) eps <= z16; always @ (posedge clk) begin case(quadrant[16]) //or 15 2'b00:begin //if the phase is in first quadrant,the sin(X)=sin(A),cos(X)=cos(A) cos <= x16; sin <= y16; end 2'b01:begin //if the phase is in second quadrant,the sin(X)=sin(A+90)=cosA,cos(X)=cos(A+90)=-sinA cos <= ~(y16) + 1'b1;//-sin sin <= x16;//cos end 2'b10:begin //if the phase is in third quadrant,the sin(X)=sin(A+180)=-sinA,cos(X)=cos(A+180)=-cosA cos <= ~(x16) + 1'b1;//-cos sin <= ~(y16) + 1'b1;//-sin end 2'b11:begin //if the phase is in forth quadrant,the sin(X)=sin(A+270)=-cosA,cos(X)=cos(A+270)=sinA cos <= y16;//sin sin <= ~(x16) + 1'b1;//-cos end endcase end
完整代码:
//360°--2^16,phase_in = 16bits (input [15:0] phase_in) //1°--2^16/360 `define rot0 16'h2000 //45 `define rot1 16'h12e4 //26.5651 `define rot2 16'h09fb //14.0362 `define rot3 16'h0511 //7.1250 `define rot4 16'h028b //3.5763 `define rot5 16'h0145 //1.7899 `define rot6 16'h00a3 //0.8952 `define rot7 16'h0051 //0.4476 `define rot8 16'h0028 //0.2238 `define rot9 16'h0014 //0.1119 `define rot10 16'h000a //0.0560 `define rot11 16'h0005 //0.0280 `define rot12 16'h0003 //0.0140 `define rot13 16'h0002 //0.0070 `define rot14 16'h0001 //0.0035 `define rot15 16'h0000 //0.0018 module cordic ( input clk, //input rst_n, //input ena, input [15:0] phase_in, output reg signed [16:0] eps, output reg signed [16:0] sin, output reg signed [16:0] cos ); parameter PIPELINE = 16; //parameter K = 16'h4dba;//k=0.607253*2^15 parameter K = 16'h9b74;//gian k=0.607253*2^16,9b74,n means the number pipeline //pipeline 16-level //maybe overflow,matlab result not overflow //MSB is signed bit,transform the sin and cos according to phase_in[15:14] reg signed [16:0] x0=0,y0=0,z0=0; reg signed [16:0] x1=0,y1=0,z1=0; reg signed [16:0] x2=0,y2=0,z2=0; reg signed [16:0] x3=0,y3=0,z3=0; reg signed [16:0] x4=0,y4=0,z4=0; reg signed [16:0] x5=0,y5=0,z5=0; reg signed [16:0] x6=0,y6=0,z6=0; reg signed [16:0] x7=0,y7=0,z7=0; reg signed [16:0] x8=0,y8=0,z8=0; reg signed [16:0] x9=0,y9=0,z9=0; reg signed [16:0] x10=0,y10=0,z10=0; reg signed [16:0] x11=0,y11=0,z11=0; reg signed [16:0] x12=0,y12=0,z12=0; reg signed [16:0] x13=0,y13=0,z13=0; reg signed [16:0] x14=0,y14=0,z14=0; reg signed [16:0] x15=0,y15=0,z15=0; reg signed [16:0] x16=0,y16=0,z16=0; reg [1:0] quadrant [PIPELINE:0]; integer i; initial begin for(i=0;i<=PIPELINE;i=i+1) quadrant[i] = 2'b0; end always @ (posedge clk)//stage 0,not pipeline begin x0 <= {1'b0,K}; //add one signed bit,0 means positive y0 <= 17'b0; z0 <= {3'b0,phase_in[13:0]};//control the phase_in to the range[0-Pi/2] end always @ (posedge clk)//stage 1 begin if(z0[16])//the diff is negative so clockwise begin x1 <= x0 + y0; y1 <= x0 - y0; z1 <= z0 + `rot0; end else begin x1 <= x0 - y0;//x1 <= x0; y1 <= x0 + y0;//y1 <= x0; z1 <= z0 - `rot0;//reversal 45 end end always @ (posedge clk)//stage 2 begin if(z1[16])//the diff is negative so clockwise begin x2 <= x1 + (y1>>>4'd1); y2 <= y1 - (x1>>>4'd1); z2 <= z1 + `rot1;//clockwise 26 end else begin x2 <= x1 - (y1>>>4'd1); y2 <= y1 + (x1>>>4'd1); z2 <= z1 - `rot1;//anti-clockwise 26 end end always @ (posedge clk)//stage 3 begin if(z2[16])//the diff is negative so clockwise begin x3 <= x2 + (y2>>>4'd2); //right shift n bits,divide 2^n y3 <= y2 - (x2>>>4'd2); //left adds n bits of MSB,in first quadrant x or y are positive,MSB =0 ?? z3 <= z2 + `rot2;//clockwise 14 //difference of positive and negtive number and no round(4,5) end else begin x3 <= x2 - (y2>>>4'd2); y3 <= y2 + (x2>>>4'd2); z3 <= z2 - `rot2;//anti-clockwise 14 end end always @ (posedge clk)//stage 4 begin if(z3[16]) begin x4 <= x3 + (y3>>>4'd3); y4 <= y3 - (x3>>>4'd3); z4 <= z3 + `rot3;//clockwise 7 end else begin x4 <= x3 - (y3>>>4'd3); y4 <= y3 + (x3>>>4'd3); z4 <= z3 - `rot3;//anti-clockwise 7 end end always @ (posedge clk)//stage 5 begin if(z4[16]) begin x5 <= x4 + (y4>>>4'd4); y5 <= y4 - (x4>>>4'd4); z5 <= z4 + `rot4;//clockwise 3 end else begin x5 <= x4 - (y4>>>4'd4); y5 <= y4 + (x4>>>4'd4); z5 <= z4 - `rot4;//anti-clockwise 3 end end always @ (posedge clk)//STAGE 6 begin if(z5[16]) begin x6 <= x5 + (y5>>>4'd5); y6 <= y5 - (x5>>>4'd5); z6 <= z5 + `rot5;//clockwise 1 end else begin x6 <= x5 - (y5>>>4'd5); y6 <= y5 + (x5>>>4'd5); z6 <= z5 - `rot5;//anti-clockwise 1 end end always @ (posedge clk)//stage 7 begin if(z6[16]) begin x7 <= x6 + (y6>>>4'd6); y7 <= y6 - (x6>>>4'd6); z7 <= z6 + `rot6; end else begin x7 <= x6 - (y6>>>4'd6); y7 <= y6 + (x6>>>4'd6); z7 <= z6 - `rot6; end end always @ (posedge clk)//stage 8 begin if(z7[16]) begin x8 <= x7 + (y7>>>4'd7); y8 <= y7 - (x7>>>4'd7); z8 <= z7 + `rot7; end else begin x8 <= x7 - (y7>>>4'd7); y8 <= y7 + (x7>>>4'd7); z8 <= z7 - `rot7; end end always @ (posedge clk)//stage 9 begin if(z8[16]) begin x9 <= x8 + (y8>>>4'd8); y9 <= y8 - (x8>>>4'd8); z9 <= z8 + `rot8; end else begin x9 <= x8 - (y8>>>4'd8); y9 <= y8 + (x8>>>4'd8); z9 <= z8 - `rot8; end end always @ (posedge clk)//stage 10 begin if(z9[16]) begin x10 <= x9 + (y9>>>4'd9); y10 <= y9 - (x9>>>4'd9); z10 <= z9 + `rot9; end else begin x10 <= x9 - (y9>>>4'd9); y10 <= y9 + (x9>>>4'd9); z10 <= z9 - `rot9; end end always @ (posedge clk)//stage 11 begin if(z10[16]) begin x11 <= x10 + (y10>>>4'd10); y11 <= y10 - (x10>>>4'd10); z11 <= z10 + `rot10; end else begin x11 <= x10 - (y10>>>4'd10); y11 <= y10 + (x10>>>4'd10); z11 <= z10 - `rot10; end end always @ (posedge clk)//stage 12 begin if(z11[16]) begin x12 <= x11 + (y11>>>4'd11); y12 <= y11 - (x11>>>4'd11); z12 <= z11 + `rot11; end else begin x12 <= x11 - (y11>>>4'd11); y12 <= y11 + (x11>>>4'd11); z12 <= z11 - `rot11; end end always @ (posedge clk)//stage 13 begin if(z12[16]) begin x13 <= x12 + (y12>>>4'd12); y13 <= y12 - (x12>>>4'd12); z13 <= z12 + `rot12; end else begin x13 <= x12 - (y12>>>4'd12); y13 <= y12 + (x12>>>4'd12); z13 <= z12 - `rot12; end end always @ (posedge clk)//stage 14 begin if(z13[16]) begin x14 <= x13 + (y13>>>4'd13); y14 <= y13 - (x13>>>4'd13); z14 <= z13 + `rot13; end else begin x14 <= x13 - (y13>>>4'd13); y14 <= y13 + (x13>>>4'd13); z14 <= z13 - `rot13; end end always @ (posedge clk)//stage 15 begin if(z14[16]) begin x15 <= x14 + (y14>>>4'd14); y15 <= y14 - (x14>>>4'd14); z15 <= z14 + `rot14; end else begin x15 <= x14 - (y14>>>4'd14); y15 <= y14 + (x14>>>4'd14); z15 <= z14 - `rot14; end end always @ (posedge clk)//stage 16 begin if(z15[16]) begin x16 <= x15 + (y15>>>4'd15); y16 <= y15 - (x15>>>4'd15); z16 <= z15 + `rot15; end else begin x16 <= x15 - (y15>>>4'd15); y16 <= y15 + (x15>>>4'd15); z16 <= z15 - `rot15; end end //according to the pipeline,register phase_in[15:14] always @ (posedge clk) begin quadrant[0] <= phase_in[15:14]; quadrant[1] <= quadrant[0]; quadrant[2] <= quadrant[1]; quadrant[3] <= quadrant[2]; quadrant[4] <= quadrant[3]; quadrant[5] <= quadrant[4]; quadrant[6] <= quadrant[5]; quadrant[7] <= quadrant[6]; quadrant[8] <= quadrant[7]; quadrant[9] <= quadrant[8]; quadrant[10] <= quadrant[9]; quadrant[11] <= quadrant[10]; quadrant[12] <= quadrant[11]; quadrant[13] <= quadrant[12]; quadrant[14] <= quadrant[13]; quadrant[15] <= quadrant[14]; quadrant[16] <= quadrant[15]; end //alter register, according to quadrant[16] to transform the result to the right result always @ (posedge clk) eps <= z16; always @ (posedge clk) begin case(quadrant[16]) //or 15 2'b00:begin //if the phase is in first quadrant,the sin(X)=sin(A),cos(X)=cos(A) cos <= x16; sin <= y16; end 2'b01:begin //if the phase is in second quadrant,the sin(X)=sin(A+90)=cosA,cos(X)=cos(A+90)=-sinA cos <= ~(y16) + 1'b1;//-sin sin <= x16;//cos end 2'b10:begin //if the phase is in third quadrant,the sin(X)=sin(A+180)=-sinA,cos(X)=cos(A+180)=-cosA cos <= ~(x16) + 1'b1;//-cos sin <= ~(y16) + 1'b1;//-sin end 2'b11:begin //if the phase is in forth quadrant,the sin(X)=sin(A+270)=-cosA,cos(X)=cos(A+270)=sinA cos <= y16;//sin sin <= ~(x16) + 1'b1;//-cos end endcase end endmodule
testbench测试代码:
`timescale 1 ps/ 1 ps module cordic_tb; // test vector input registers reg arst; reg clk; reg [15:0] phase = 16'h2000; // wires wire signed [16:0] cosine_out; wire signed [7:0] eps_out; wire signed [16:0] sine_out; // localparam coef=1000; // assign statements (if any) cordic i1 ( // port map - connection between master ports and signals/registers .clk(clk), .cos(cosine_out), .eps(eps_out), .phase_in(phase), .sin(sine_out) ); initial begin clk=0; #(10000*coef) $stop; end always #(5*coef) clk=~clk; // always @(negedge clk) begin phase=phase+16'h0100; end endmodule
3、Modelsim仿真结果
仿真结果的补充说明:
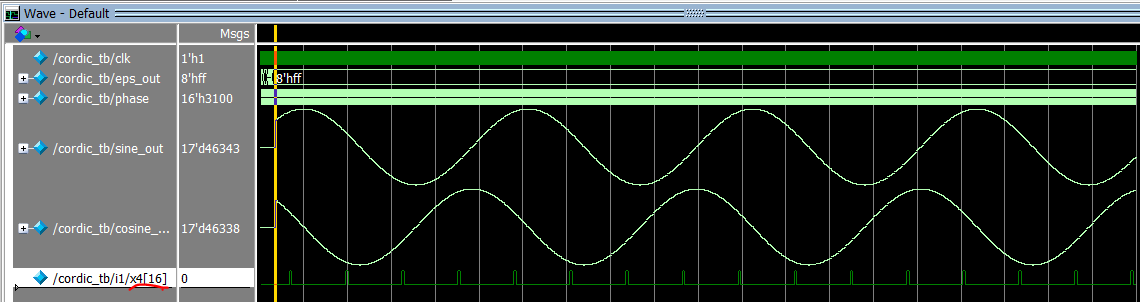
(1)程序全程未使用复位信号,testbench中第一个计算的角度为16'h2000也就是45度,如果以图示时刻为0时刻、仿真结果对应的波形即分别为sin(x+π/4)和cos(x+π/4)的波形。作为参考,0.5*√2*65535≈46340.
(2)关于运算过程中的位数溢出
根据仿真结果,本测试例下,x4出现过16位位数溢出。
(3)关于流水线设计的理解
前文提到过实现CORDIC迭代算法时可以使用反馈结构(只使用一级)、也可以使用流水线结构(多级),如果任务是只单独计算一个角度的正弦或者余弦值,那么所需要的迭代次数或者说消耗的时钟周期数量其实是相同的,本设计中为16个时钟。
流水线结构的威力是在连续、源源不断地计算一组多个角度的正余弦值的时候才展现出来,当初始流水线被填满之后,每经过一个时钟周期、都会在输出上获得一个更新的角度的正余弦结果值,上图仿真结果图中黄色cursor左侧的时间段内、流水线即被逐步填满。
换句话说,如果现在的任务是要计算n个角度的正余弦值、计算一个角度需要的迭代次数为x,反馈结构需要的时长为(n*x)个时钟周期,流水线结构只需要(n+x-1)个时钟周期。