Descriptor-based Matching
uncalibrated mathcing return perspective map,calibrated matching return pose.
find_calib_descriptor_model()
Deformable Matching
Find objects with perspective distortions,is best for objects with clear planar edges.
find_planar_calib_deformable_model()
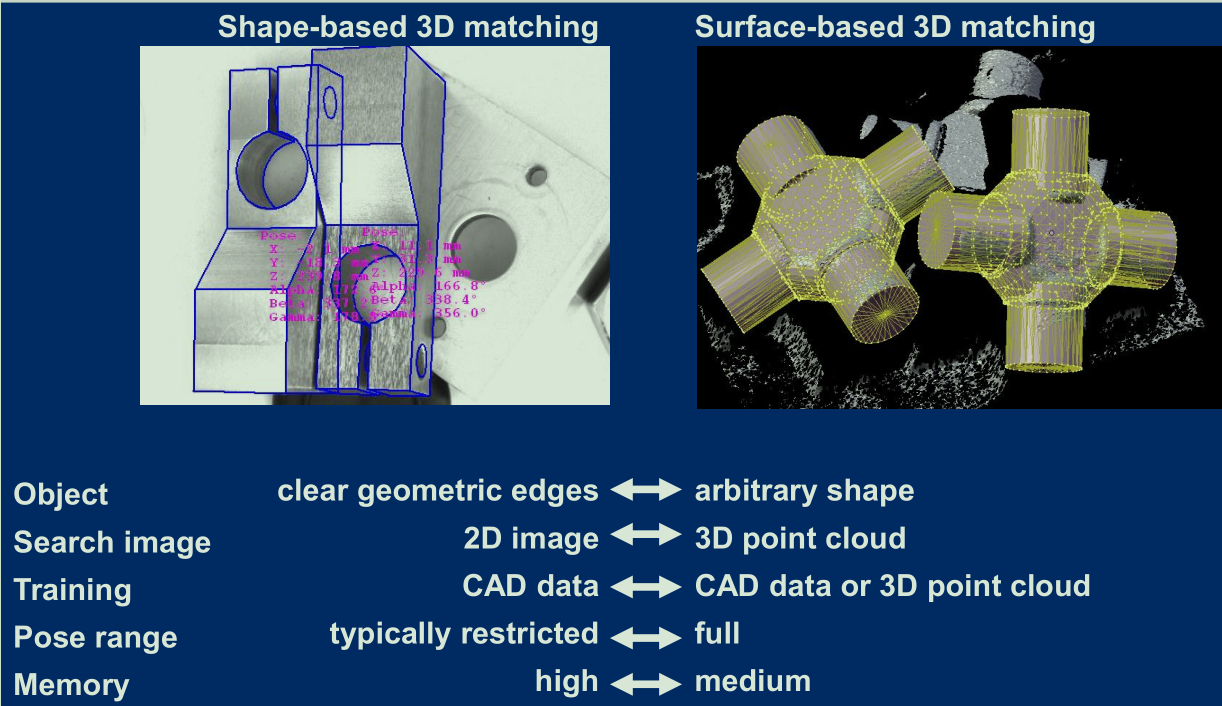
Shape-based 3D matching
【Read a 3D object model from a file】
read_object_model_3d()
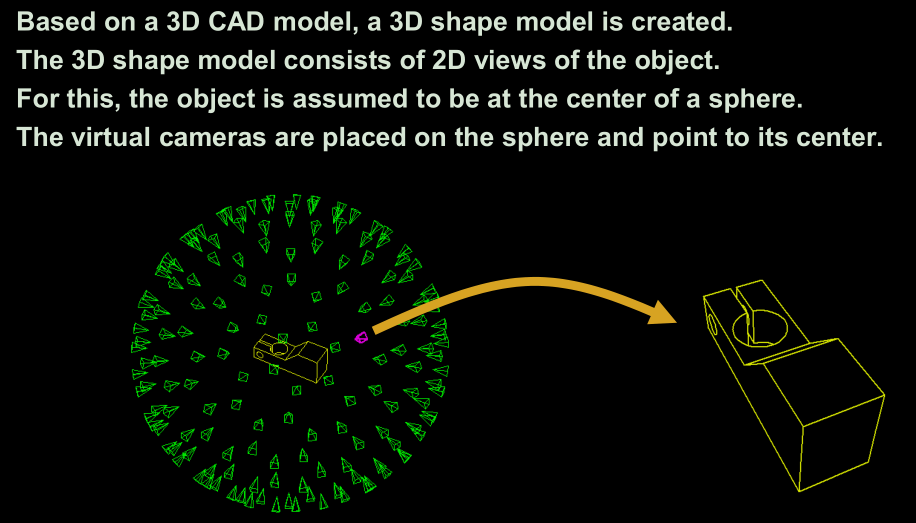
【通过3D模型创建形状模板】
create_shape_model_3d()
The 3D shape model is generated by computing different views of the 3D object model within a user-specified pose range. The views are automatically generated by placing virtual cameras around the 3D object model and projecting the 3D object model into the image plane of each virtual camera position. For each such obtained view a 2D shape representation is computed. Thus, for the generation of the 3D shape model, no images of the object are used but only the 3D object model, which is passed in ObjectModel3D. The shape representations of all views are stored in the 3D shape model, which is returned in ShapeModel3DID. During the matching process with find_shape_model_3d, the shape representations are used to find out the best-matching view, from which the pose is subsequently refined and returned.
【Read a 3D shape model from a file】
read_shape_model_3d( : : FileName : ShapeModel3DID)
【Find the best matches of a 3D shape model in an image】
find_shape_model_3d(Image : : ShapeModel3DID, MinScore, Greediness, NumLevels, GenParamName, GenParamValue : Pose, CovPose, Score)
【Project the edges of a 3D shape model into image coordinates】
project_shape_model_3d( : ModelContours : ShapeModel3DID, CamParam, Pose, HiddenSurfaceRemoval, MinFaceAngle : )
Surface-based 3D Matching
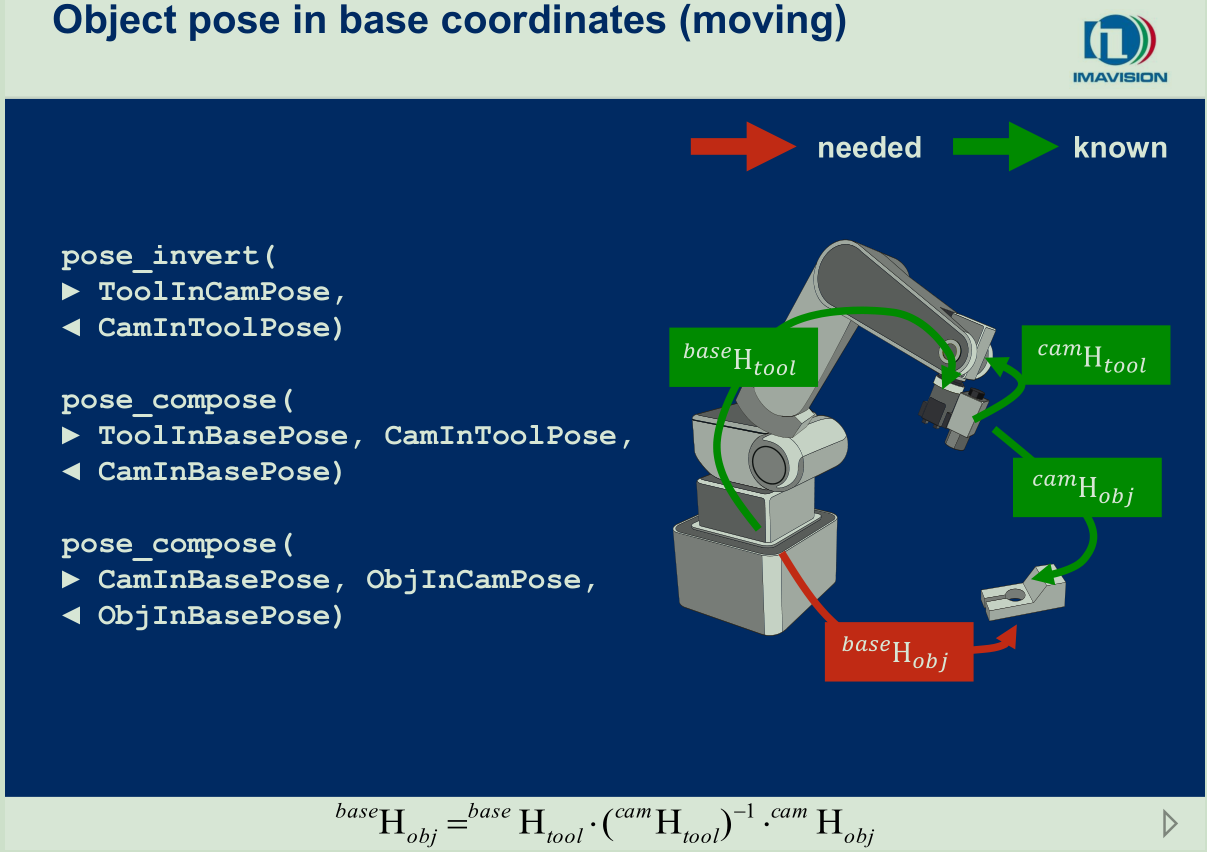
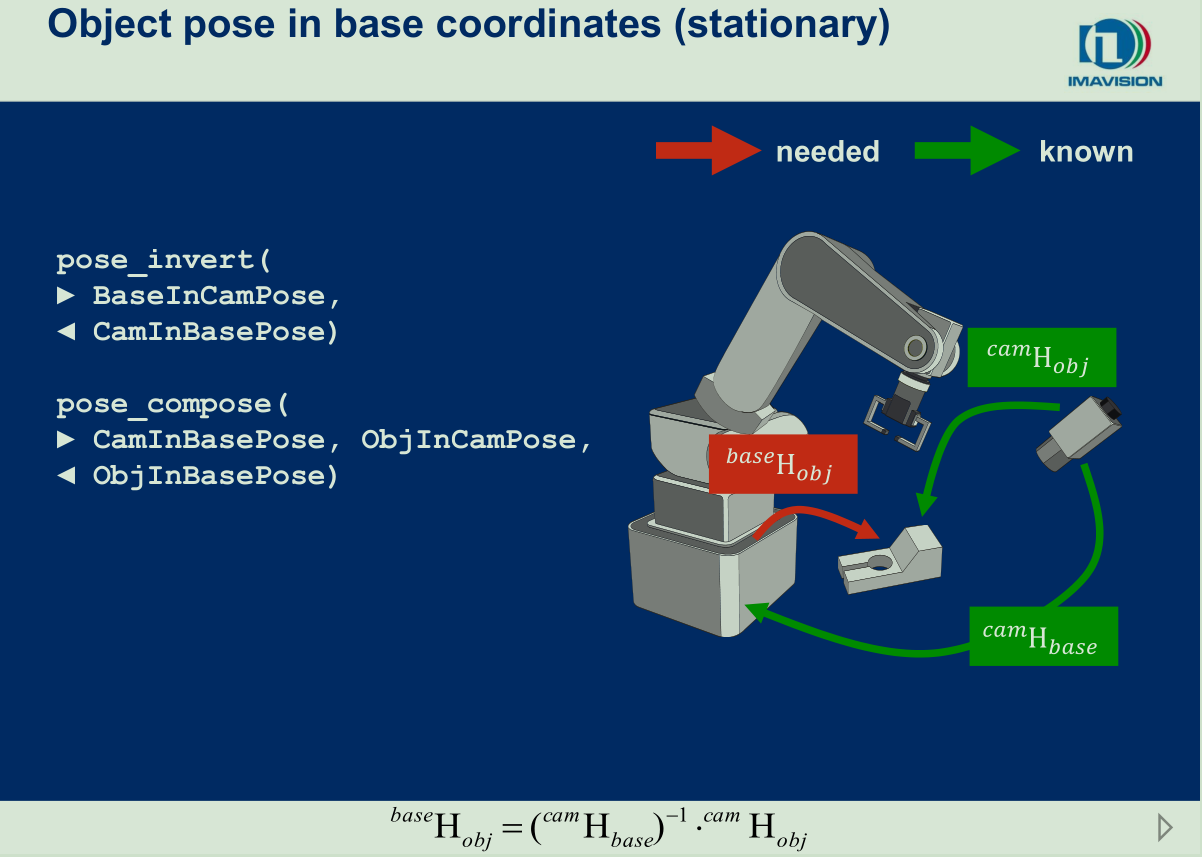
Hand-eye Calibration